基于旋转灰度特征与位移约束的图像伪造检测算法∗
2018-10-29 07:51李晓红杨玉香姜春峰
新疆大学学报(自然科学版)(中英文) 2018年3期
李晓红,杨玉香,姜春峰
(1.吉林省经济管理干部学院,吉林长春130012;2.中国计量学院,浙江杭州310018;3.东北大学,辽宁沈阳110819)
0 引言
当今社会信息技术也越来越被人们所重视,数字图像处理软件也随处可见,通过一些数字图像处理软件可轻易的对数字图像的原始内容进行篡改,形成伪造的数字图像[1−3].由于伪造图像中篡改的内容难以通过肉眼直接辨别,所以如何快速准确的实现对伪造图像中的篡改内容进行检测,成为当下学者研究的热点之一[4,5].
为了获取伪造图像更好地检测结果,国内外许多学者对图像伪造检测算法进行了深入研究,得到了多种多样的图像伪造检测方法.例如Kalra[6]等人通过对水印技术的深入研究,提出了彩色图像频域自适应水印嵌入方法,通过将数字图像打上水印的方法,防止图像内容被篡改或者辨别伪造图像,但是该方法难以准确的分辨出伪造内容,而且通过有损压缩技术可以将水印内容进行破坏,导致该方法效果不佳.为了能分辨伪造内容,李晓飞[7]等人提出了基于SIFT的伪造图像盲检测算法,利用SIFT算法提取特征点以及获取特征描述子,然后采用乘积量化处理后的最近邻搜索法完成图像匹配,最后通过利用欧氏距离度量法对可疑块进行判定完成图像伪造检测.该方法虽然能对伪造图像中的篡改内容进行分辨,但是SIFT算法提取的特征点中存在较多的伪特征点,使得算法的检测正确度下降.对此,柴新新[8]等人提出了基于提升小波变换的图像篡改检测算法,利用提升小波变换获取图像的低频分量后对图像进行分块,然后通过奇异值分解获取特征向量矩阵,最后根据偏移向量对篡改内容进行检测.该方法能够较为准确的对伪造区域进行检测,但是由于提升小波变换以及奇异值分解过程的计算复杂度较高,使得算法的效率不理想.
因此,为了对伪造图像快速准确的检测,本文提出了基于旋转灰度特征耦合位移约束的图像伪造检测算法.通过定义十字约束法则,对FAST算法进行改进,以精确提取待检测图像中的特征点.利用像素点对应的梯度信息形成统计直方图,再利用直方图的峰值特征获取特征点的主方向,用基于特征点灰度特性的旋转灰度特征模型获取特征向量,以获取较低维度的特征描述子,使得算法的效率以及鲁棒性能得以提升.通过特征点的空间信息构造位移约束规则,并利用位移约束规则下的归一化互相关函数完成特征点的匹配.最后通过均值漂移模型对伪造图像中的篡改内容进一步定位,以提高算法的检测精度,实现图像的伪造检测.
1 本文图像伪造检测算法
本文图像伪造检测算法的过程如图1所示.由图1可知,本文图像伪造检测算法主要由提取图像特征点、获取特征描述子、完成特征点匹配以及进行特征点分类四个部分组成.在提取图像特征点时,通过十字约束法则对FAST算法进行改进,可精确、快速提取图像特征点.在获取特征描述子时,通过像素点的梯度特征形成直方图,然后通过直方图峰值信息获取特征点的主方向,利用旋转灰度特征模型获取特征向量,从而完成特征描述子的获取.在完成特征点匹配时,通过特征点的位置以及角度特征,构造位移约束规则,并在位移约束规则下通过归一化互相关函数完成特征点的匹配.利用均值漂移模型对特征点进行分类,进一步对伪造图像中的篡改内容进行定位,完成图像的伪造检测.

图1 本文图像伪造检测算法的过程
1.1 提取图像特征点
对图像特征点进行准确的提取是图像伪造检测算法实现精确检测的基础.目前提取图像特征点的算法有Forstner算法、Harris算法以及FAST算法等.在这些算法当中,FAST算法具有对图像特征点进行精确提取的特点,但其对特征点提取时耗时较多[9].对此,本文采用十字约束法则对FAST算法进行改进,以提高FAST算法对特征点提取的效率.
FAST算法的原理为:选定任意像素点作为圆心r,利用Bresenham方法构造一个圆形区域.对该选中像素点圆形邻域上的16个像素点按顺时针方向从1开始编号[10].通过灰度度量函数对选定像素点以及圆上各像素点的灰度差值进行计算,其中,灰度度量函数表述如下:

若至少有V(0≤V≤16)个圆上的像素点与选定像素点的灰度度量值大于预定阀值FH,则判定被选定的像素点视为特征点[11,12].

FAST算法中构造的圆形区域如图2所示.从图2可见,在圆形邻域上的16个像素点中,若有不少于12个连续像素点的灰度度量值大于预定阀值r,这些连续的像素点都必须至少包含编号为第1、5、9、13四个像素点中的其中三个,而且在圆形上编号为第1、5、9、13的四个像素点刚好组成一个“十”字形,而且这四个像素点对选定像素点r的影响相对较大[13].由此构造出十字约束法则:在原FAST算法的基础上,首先,通过(1)式对编号为1、5、9、13的四个像素点进行计算,若这四个点中至少有三个像素点计算所得的H值大于FH,则继续按照原FAST算法对特征点进行判断;反之,则停止后续FAST算法的计算,抛弃该选定像素点.通过十字约束法则对FAST算法进行改进后,可有效降低FAST算法提取图像特征点过程中的计算次数,从而提高特征点提取的效率.
为了验证本文改进的FAST算法对特征点提取的效果,将图3(a)作为测试目标,图3(b)为本文算法提取的特征点.从图3(b)可见,本文所设计的改进的FAST算法能够较好的提取测试图像中的特征点.

图2 FAST算法提取图像特征点的过程

图3 特征点提取测试结果
1.2 获取特征描述子
在提取完特征点后,需要对每个特征点进行描述,以找出每个特征点的特征,对不同特征点加以区别.特征描述子的生成包括确定特征点的主方向以及获取特征向量.为此,本文通过利用像素点的梯度值构成直方图,然后根据直方图峰值确定特征点的主方向;并利用特征点灰度值构造旋转灰度特征模型,通过其获取特征向量,完成特征描述子的获取.首先,选定任意一个特征点p(x,y)为中心,求取其对应邻域内像素点的梯度值T以及梯度方向θ[14].

其中,C(x,y,α)为图像对应的尺度空间,α为对应的尺度因子.
根据所求得的特征点邻域内像素点对应的梯度方向θ,形成梯度特征统计直方图,则直方图的峰值方向即为特征点的主方向,能量为直方图峰值80%的次峰值方向为特征点的辅方向[15,16].以图3(b)为例,通过上述过程,得到其相应的特征描述子见图4(a).
以特征点p(x,y)为中心,以主方向为起点方向,构造一个半径为G的圆形邻域S.以特征点p(x,y)为中心小于G的采样半径g,对S进行旋转采样.采样方法在旋转过程中对形成的旋转圆周等距离的采样n个点.求取采样点的灰度值h(i),以及特征点的灰度值h(p),从而形成灰度特征模型:

用上述灰度特征构造旋转灰度特征模型:

以特征点p(x,y)为中心,沿着主方向构造一个边长为64α的正方形窗口,并将其均分成8×8个子域,在每个子域内求取中心像素点对应的旋转灰度特征模型XHi.将每个子域所求得的XHi进行组合,形成一个64维的向量,再将此向量进行归一化处理,由此可得所求的特征向量B.

1.3 特征点匹配
完成对每个特征点的描述后,需要通过一定的方法对特征点进行匹配,将图像中没有被匹配上的特征点进行剔除,对伪造区域进行初步定位.近邻比值法为当前常用的特征点匹配方法,该方法通过寻找最近邻与次近邻的比值计算而完成特征点匹配.该方法计算量较大而且容易产生较多的错误匹配.对此,本文利用特征点的空间信息构造了位移约束规则,在位移约束规则下利用归一化互相关函数完成特征点匹配,以减少计算量,提高匹配正确度以及算法鲁棒性能.
对于待匹配的两个特征点,其对应在空间信息中的位置信息以及旋转角度信息相对其他特征点偏差较小[17].利用该项特性,构造位移约束规则:对于图像Wi中坐标为(xi,yi)的特征点d(xi,yi),在待匹配图像Wj中相同的坐标处,以尺寸V×V为窗口,搜索位于该窗口内的所有特征点,若有多个特征点则取与d(xi,yi)位置最近而且旋转角度最小的特征点为目标特征点(xj,yj).
对于图像Wi中的特征点d(xi,yi)和图像Wj中的特征点(xj,yj),其对应的归一化互相关函数表述如下[18]:

CH值越大,则表示d(xi,yi)和(xj,yj)的相似度越高.
根据位移约束规则,在图像Wj中搜索与图像Wi中特征点d(xi,yi)相对应的目标特征点(xj,yj);然后利用归一化互相关函数计算d(xi,yi)和(xj,yj)的相似度,若其对应的相似度大于预定相似阀值FX,则判定d(xi,yi)和(xj,yj)为一对匹配特征点.
以图3(b)为例,用本文所设计特征点匹配方法来对其特征点进行匹配,匹配结果如图4(b)所示.从图中可知,本文算法所提出的特征点匹配方法能对图3(b)中的特征点进行准确匹配.
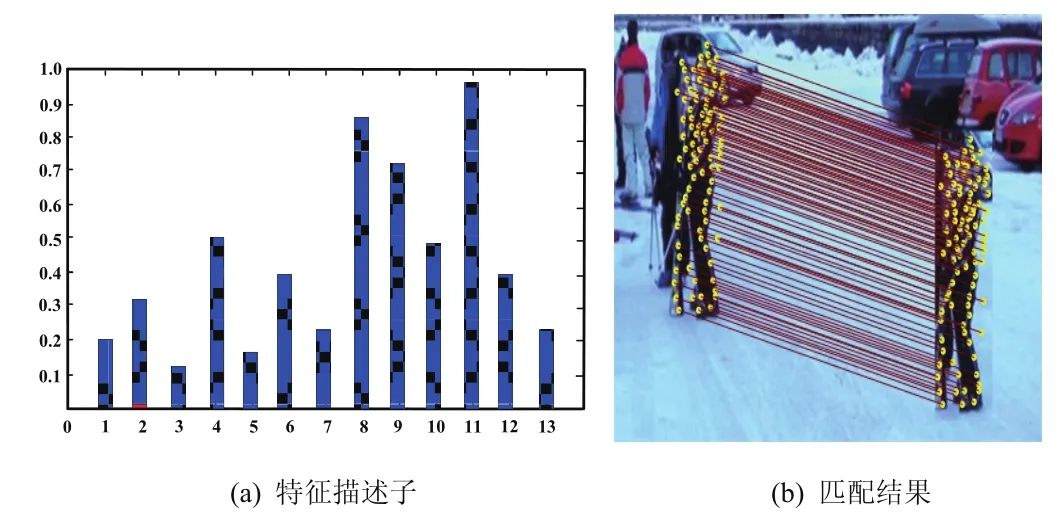
图4 特征描述子及其匹配结果
1.4 特征点分类
通过特征点的匹配初步对伪造内容进行了定位,为了能够更加精确的对伪造区域进行判定,还需要对相近或者相类似的匹配特征点进行分类.随后,采用均值漂移模型来对特征点进行分类,进一步对伪造内容进行精确定位.而均值漂移(mean-shift)算法是依托密度梯度上升情况的一种非参数方法,其通过迭代运算的方法实现对样本点的分类[19].对于样本集合Ji(i=1,2,3,···n)中,当有k个样本位于半径为h的高维球区域Bh时,则样本点b对应的均值漂移向量为:

将高斯核函数G(b)以及带宽矩阵h引入(9)式,通过整理可得均值漂移模型[20]:

式中,α(Ji)表示样本数据的权重,其值为一个正数.
通过(10)式求取样本点bm和bn对应的L(bm)和L(bn),若下式成立,则将样本点bm和bn分为一类.

式中,ε为预定的相似误差.
当样本点bm和bn对应的L(bm)和L(bn)不满足式(11)时,则返回,继续对下一对特征点进行分类.
将匹配后所得的特征点视为均值漂移算法中的样本点,利用均值漂移模型对特征点进行分类,完成图像伪造检测.以图4为对象,利用上述过程对其特征点进行分类,以实现伪造区域的精确检测.特征点分类后的结果如图5所示.从图5可见,伪造内容被准确定位检测出来.

图5 图像伪造检测结果
2 实验结果与分析
本文将借助于配置为IntelI5、3.4GHzCPU、4GB内存、500GB硬盘的PC机,在操作系统为Windows XP条件下,利用MATLAB7.0软件进行仿真实验.实验中将文献[21]以及文献[22]中的图像伪造检测方法设立为对照组.通过本算法与对照组算法对不同篡改方法形成的伪造图像进行检测,通过对检测结果进行对比分析,验证本文算法的有效性以及优越性.
2.1 不同算法的图像伪造检测结果及分析
首先,对复制-粘贴篡改方法形成的伪造图像进行检测,不同算法的检测结果如图6所示.为了进一步验证算法的鲁棒性能,再利用不同算法对复制-粘贴叠加旋转以及噪声的复合篡改方法形成的伪造图像进行检测,检测结果如图7所示.
从图6和图7中不同算法对伪造图像检测的效果可见,对照组方法以及本文方法都能对伪造图像进行检测.在图6中,通过将本文方法的检测结果(见图6(h)),与文献[21]中方法的检测结果(见图6(d))以及文献[22]中方法的检测结果(见图6(f))对比可见,本文方法检测精度更高,从图6(j)也可知,所提技术中不仅具有更多的检测点,而且错误检测点也是最少的.在图7中,通过将本文方法的检测结果(见图7(h)),与文献[21]中方法的检测结果(见图7(d))以及文献[22]中方法的检测结果(见图7(f))对比可见,本文方法能够完整地检测出篡改区域,具有更高的定位精度;且从图7(j)可知,所提技术的检测结果中不仅漏检点最少,而且错误检测点也最少.通过在图6和图7中对不同方法的检测结果对比可见,与对照组算法相比,本文算法在对伪造图像进行检测时,不仅具有更高的检测正确性以及更精确的检测精度,而且本文算法还具有更好的鲁棒性能.因为本文利用特征点的空间信息构造了位移约束规则,然后通过位移约束规则对待匹配特征点进行约束,最后通过归一化互相关函数对待匹配特征点对的相似性进行度量完成特征点匹配,提高了算法的匹配正确度以及鲁棒性能.同时本文还采用了均值漂移模型对匹配特征点进行分类,进一步精确了伪造内容,提高了算法的检测精度.

图6 不同算法对复制-粘贴篡改的伪造图像检测结果图
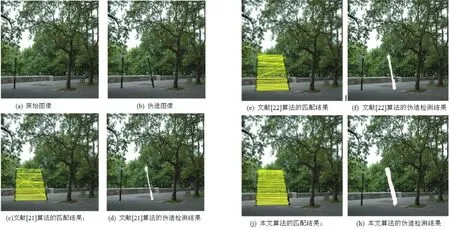
图7 不同算法对复制-粘贴叠加旋转以及噪声篡改的伪造图像检测结果图
2.2 量化测试与分析
用不同图像伪造检测算法对图8中的测试图像进行伪造检测,并将不同算法的检测耗时记录在表1中,将不同算法的检测正确率以及错误检测率形成ROC曲线.通过不同算法的检测耗时以及ROC曲线实现对不同算法的量化测试.
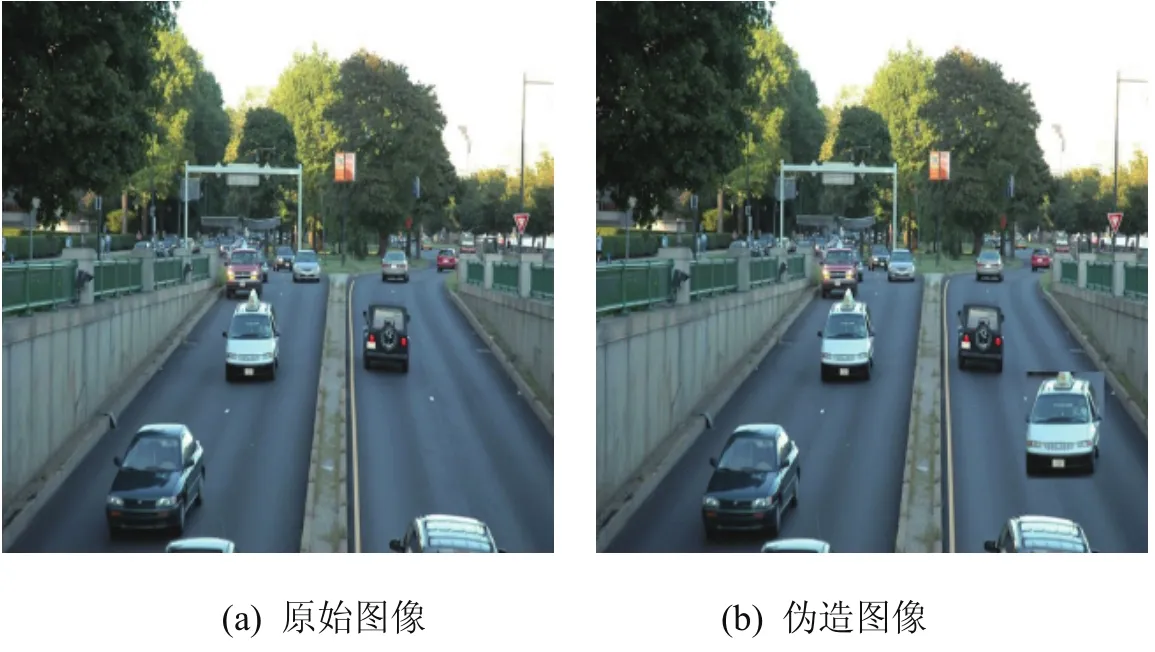
图8 量化测试对象
由表1中不同算法的匹配耗时进行对比可见,本文算法的匹配耗时为5.4531s,比对照组算法的匹配耗时都少,说明本文算法的检测效率最高.图9为不同算法测试所得的ROC曲线.由此可见,本文算法测试所得的ROC曲线特性最佳,说明本文算法对测试图像的检测精准度最高.因为本文采用了十字约束法则改进的FAST算法对图像提取特征点,降低了计算量;同时本文还采用了旋转灰度特征模型获取了较低维度的特征描述子,从而提高了算法的检测效率.另外本文还构造了位移约束规则,在此规则下利用归一化互相关函数完成特征点匹配,进一步提高了算法的检测效率以及检测精准度.文献[21]中利用SIFT算法提取特征点以及生成特征描述子,再利用近邻比值法完成伪造检测.但是,SIFT算法提取的特征点中存在较多的伪特征点,而且SIFT算法生成的特征描述子维度较高,从而使得算法检测精准度下降耗时较多.文献[22]中首先对读取图像文件中的量化表和JPEG系数,然后将图像通过特定质量因子的JPEG压缩,最后通过图像子块两次压缩后的JPEG系数变化率完成伪造检测.由于图像JPEG压缩过程计算较复杂,而且容易受到噪声等干扰使得检测出错,导致算法检测效率以及检测精准度不佳.

图9 不同算法测试所得的ROC曲线

表1 不同算法的检测耗时
3 结论
本文提出基于旋转灰度特征耦合位移约束的图像伪造检测算法,通过十字约束法则下的FAST算法对图像特征点进行检测,在十字约束法则下降低了计算复杂度,提高了算法的检测效率.利用判断直方图峰值的方法确定特征点主方向,利用旋转灰度特征模型获取特征向量,生成较低维度的特征描述子,进一步降低了算法的检测耗时.通过构造位移约束规则,利用位移约束规则下的归一化互相关函数完成特征点匹配,提高了算法的检测正确度以及算法的鲁棒性能.通过均值漂移模型对特征点进行分类,以实现对伪造内容进行精确的定位,提高了算法的检测精度,从而完成图像的伪造检测.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
上海大学学报(自然科学版)(2018年5期)2018-11-02
赢未来(2018年4期)2018-09-27
电脑知识与技术(2018年35期)2018-02-27
科技视界(2018年32期)2018-02-21
自动化学报(2017年4期)2017-06-15
自动化学报(2017年5期)2017-05-14