滑翔飞行器反逆轨拦截突防制导律研究
2018-10-29 01:39刘开封孟海东王长江李军营陈颖
现代防御技术 2018年5期
刘开封,孟海东,王长江,李军营,陈颖
(火箭军研究院 第六研究所,北京 100094)
0 引言
动能拦截器(kinetic kill vehicle, KKV)助推级一旦关机,其仅能利用轨控发动机提供机动加速度,由于轨控发动机可用加速度有限,决定了KKV拦截范围也有限[1-2]。高超声速滑翔飞行器具有速度快、机动能力强和轨迹难以预测的特点[3-5],因此KKV助推级很难将其推进至理想拦截状态,若KKV与助推级分离时刻状态与理想拦截状态存在偏差,则高超声速滑翔飞行器可利用其速度快、机动能力强的特点逃逸KKV拦截范围。
本文基于假设条件,从逃逸KKV机动拦截范围的角度,首先分析了高超声速滑翔飞行器利用空气动力反逆轨拦截机动突防的可能性,然后根据动能拦截器助推分离时刻的状态参数推导了机动突防制导律,最后对推导的机动突防制导律进行了仿真验证。
1 反逆轨拦截机动突防可能性分析
1.1 前提条件
本文反逆轨拦截机动突防方法,是基于以下前提条件展开的:
(1) 由于从KKV与助推级分离到拦截交会时间很短(一般为几秒至十几秒),因此可假设地球为不旋转圆球;
(2) 由于拦截末段突防飞行器与KKV高度相差不大,且位置偏差相对于地球半径也为小量,因此可近似认为拦截双方重力加速度相同,则重力加速度对拦截双方产生的速度和位置变化也相同,因此可不考虑重力加速度对双方的影响,即认为为零重力加速度环境;
(3) 由于KKV气动参考面积较小,因此可忽略KKV空气动力;
(4) KKV可向任意方向提供加速度;
(5) KKV助推分离时刻红外特性变化明显,因此假设突防飞行器能够获取KKV分离时刻状态参数。
1.2 机动突防可能性分析
在上述条件下,若KKV轨控发送机最大可用加速度为aI,KKV与助推级分离时刻t0的初速为vi0,则KKV最大机动范围如图1所示,为以vi0为对称轴的“喇叭形”区域[6],t时刻最大机动半径Ri(t)为
Ri(t)=0.5aI(t-t0)2
.
(1)
因此,不难量化出最大机动半径,如图1所示。
若KKV与助推级分离时刻,拦截双方速度方向均位于视线方向且方向相反,称为理想拦截条件。如图1所示,图中m0和vm0分别为KKV与助推级分离时刻突防飞行器位置和速度矢量,i0和vi0分别为KKV与助推级分离时刻KKV位置和速度矢量。若突防飞行器可用加速度小于拦截器可用加速度,在不考虑KKV探测、控制误差和延时的情况下,显然突防飞行器无法突破KKV拦截。

图1 KKV理想拦截条件示意图Fig.1 Perfect interception condition of KKV
但由表1可以看出,KKV机动范围并不大,而突防飞行器的速度很大,如果vm0和vi0方向存在偏差,则可能逃出KKV拦截范围。

表1 KKV最大机动半径Ri对照表


图2 逆轨拦截示意图Fig.2 Anti-head-on interception schematic
定义北天东坐标系(m0xnynzn)[7],该坐标系的原点O1位于突防飞行器质心;O1yn轴在地心与突防飞行器质心连线方向上;O1xn轴在过突防飞行器质心的子午面内且垂直于O1yn轴,指向北极为正;O1zn与O1xn,O1yn构成右手直角坐标系。
定义视线坐标系(O1ξηζ)[7],该坐标系的原点位于突防飞行器质心O1;O1ξ轴由突防飞行器指向拦截器;O1ζ轴位于北天东坐标系O1xnzn平面内,且与O1ξ轴垂直,顺O1ξ看去O1ζ指向右侧;O1η与O1ξ,O1ζ构成右手直角坐标系。
并定义拦截坐标系(m0xiyizi),原点位于m0,该坐标系m0xi轴与视线重合,m0yi轴位于初始拦截平面法向,方向与vi0×m0i0方向相同,m0yi按右手定则确定,拦截坐标系为惯性坐标系,原点和坐标轴方向不随突防双方状态改变而改变。由于m0xi轴与视线重合,t0时刻视线坐标系与拦截坐标系仅存在一个欧拉角λR,t0时刻拦截坐标系、视线坐标系与北天东坐标系之间的关系如图3所示。
图3 北天东、视线与拦截坐标系关系图Fig.3 Geometric relationship of north sky east, sight line and interception coordinate system
在前提假设下,在惯性空间中若tf时刻满足式(2)或式(3)之一,则说明tf时刻突防飞行器位于KKV可拦截区域之外,即成功突防。

(2)

(3)

式(2)和式(3)分别代表了在垂直于初始拦截平面方向上突防和在初始拦截平面内突防,下面分别讨论。
1.3 垂直于初始拦截平面突防可行性分析

表2 不同参数下突破KKV拦截的可能性
1.4 初始拦截平面内突防可行性分析
同理分析在初始拦截平面内突防可行性。令
ΔvIN=vm0cosβc0sinαcm0-vi0sinαci0.
(4)

综上所述,当KKV拦截初始条件与理想拦截条件之间偏差大于一定值时,滑翔飞行器可利用自身机动能力实施机动突防。
2 机动突防制导律
初始拦截平面的法向单位向量即拦截坐标系m0yi轴单位向量,在地心坐标系表示为

(5)
式中:vi0e=(vxi0e,vyi0e,vzi0e)T为vi0在地心系下的分量;r0e=(rx0e,ry0e,rz0e)T为m0i0在地心系下的分量。
将其转换到t0时刻的视线坐标系,得
e⊥s=SN(t0)NE(t0)e⊥e,
(6)
式中:NE(t0)为t0时刻地心坐标系到北天东坐标系的转换矩阵;SN(t0)为t0时刻北天东坐标系到视线坐标系的转换矩阵;e⊥s=(e⊥ξ,e⊥η,e⊥ζ)T。
则拦截坐标系到t0时刻视线坐标系的转换矩阵为
(7)
vm0在拦截坐标系下的投影为
vm0i=IS(t0)SN(t0)NE(t0)vm0e,
(8)
式中:vm0e为vm0在地心坐标系下的向量表示,vm0e=(vxm0e,vym0e,vzm0e)T;vm0i为vm0在拦截坐标系下的向量表示,vm0i=(vxm0i,vym0i,vzm0i)T。
则

(9)

(10)
vi0在拦截坐标系下投影为
vi0i=IS(t0)SN(t0)NE(t0)vi0e,
(11)
式中:vi0e为vi0在地心坐标系下的向量表示,vi0e=(vxi0e,vyi0e,vzi0e)T;vi0i为vi0在拦截坐标系下的向量表示,vi0i=(vxi0i,vyi0i,vzi0i)T。
则

(12)
任意t时刻突防飞行器气动加速度在拦截坐标系下的投影为

(13)
式中:IP=(Iij),i=1,2,3,j=1,2,3为轨迹坐标系到拦截坐标系的转换矩阵;IP=IS(t0)SN(t0)NE(t0)·EN(t)NP(t),其中NP(t)为t时刻轨迹坐标系到北天东坐标系的转换矩阵,EN(t)为t时刻北天东坐标系到地心坐标系的转换矩阵。由于拦截坐标系指向t0时刻惯性空间固定方向,因此需要以地心坐标系作为中介,进行向量投影变换。
则ami在拦截坐标系m0yi和m0zi轴上的投影为
(14)
式(14)可进一步化为
(15)

若t时刻滑翔飞行器速度矢量vm与拦截平面的夹角为βc(t),与m0xiyi平面的夹角为αcm(t),则由图2可以看出
(16)
式中:L⊥为在拦截平面垂直方向上的升力分量;LIN为在拦截平面内的升力分量。
由于拦截过程中βc(t),αcm(t)始终为小量,且滑翔飞行器为大升阻比飞行器,因此
(17)
对比式(15),得
(18)
为了逃脱KKV拦截范围,应使突防飞行器在拦截坐标系m0yi或m0zi方向上位移最大。即aymi或azmi最大,并且aymi与azmi的方向应与在m0yi或m0zi方向上初始相对速度一致。得到突防制导律为
(19)
式中:αmax为最大攻角。
3 仿真结果及分析
假设滑翔飞行器跟踪某条预定轨迹飞行,初始飞行高度60 km、速度6 500 m/s、当地速度倾角为0,采用加热量最小轨迹优化[10]得到,动力学及制导模型参照文献[11-13],当飞行至1 200 s时发现助推分离时刻的KKV拦截,KKV距离滑翔飞行器100 km,KKV初始速度为3 000 m/s,并且λD=Θ,λT=Ψ,λR=0,βc0=0,αic0=0,αmc0=3,滑翔飞行器最大攻角取15°,KKV法向和侧向最大机动加速度均为40 m/s2,KKV采用经典比例导引[14]。
突防起始时刻(1 200 s)时滑翔飞行器飞行状态如表3所示,滑翔飞行器气动参数参照文献[15]。

表3 飞行器突防起始时刻状态


图4 地心坐标系突防-拦截轨迹Fig.4 Penetration track vs. interception track in geocentric coordinate

图5 突防-拦截空间轨迹Fig.5 Penetrating track vs. interception track on earth
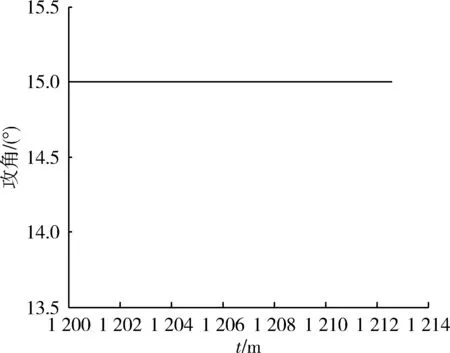
图6 突防时段攻角变化Fig.6 Angle of attack in penetration period
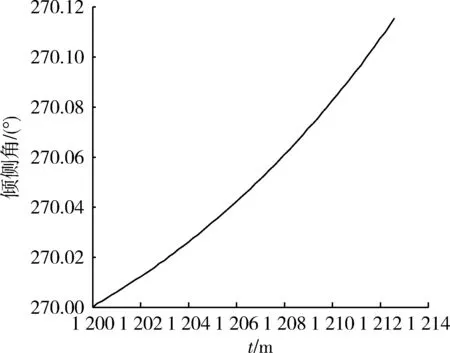
图7 突防时段倾侧角变化Fig.7 Angle of steer in penetration period

图8 突防时段总过载变化规律Fig.8 General overload in penetration period

图9 突防时段位移变化规律(相对于不突防机动轨迹)Fig.9 Displacement in penetration period relative to nonmaneuvering track
由于拦截时间为12.6 s,根据式(1)得KKV在拦截交会时刻的最大机动半径为4 489.73 m,由于其初速度位于视线方向,说明其在拦截交会时刻偏离初始视线最大距离也为4 489.73 m。假设突防飞行器做匀速运动,其在拦截交会时刻垂直于初始视线方向的位移为
S=vm0sinαmc0(tf-t0)=
5 018.98×sin(3°)×12.6=
3 309.68<4 489.73.
显然,滑翔飞行器若不作机动突防动作,不能够逃逸KKV拦截区域,而采用本文设计突防制导律却实现了逃逸,说明本文反逆轨拦截突防制导律是有效的。
4 结束语
本文对高超声速飞行器利用空气动力突破KKV拦截的可能性进行了分析,并根据KKV助推分离时刻状态推导了突防制导律,利用KKV拦截初始误差实现了对KKV机动拦截范围的逃逸。仿真结果表明该方法在KKV拦截初始条件与理想拦截条件存在一定的偏差时,能够有效逃逸KKV机动拦截范围。
猜你喜欢
上海人大月刊(2022年5期)2022-05-19
特区文学·诗(2021年6期)2021-12-22
军民两用技术与产品(2021年7期)2021-10-13
北京航空航天大学学报(2020年3期)2021-01-14
青年文学家(2020年22期)2020-08-31
数字海洋与水下攻防(2019年4期)2019-12-02
人大建设(2018年6期)2018-08-16
当代陕西(2018年6期)2018-05-22
当代贵州(2015年19期)2015-06-13
岷峨诗稿(2014年3期)2014-11-15