基于SIFT特征的铁路扣件状态检测算法
2018-10-26 06:11:08赵珊珊
传感器与微系统 2018年11期
赵珊珊, 何 宁, 曹 珊
(1.北京联合大学 北京市信息服务工程重点实验室,北京 100101; 2.北京联合大学智慧城市学院,北京 100101)
0 引 言
目前我国高铁发展迅速,车载轨道巡检系统方面的研究取得了一定的成果,但一直未能很好地解决铁路轨道及铁路扣件状态的检测问题。铁路扣件缺失或断裂,都可能酿成列车脱轨等重大事故。文献采用小波变换得到扣件区域,并用阈值分割和形态学方法获得扣件的二值图像,但受背景环境的影响。文献采用方向场和模板匹配的方法检测出扣件状态,该方法对扣件定位的精确度和图像质量要求很高,匹配精度受到严重制约。文献采用传统的梯度方向直方图(histogram of oriented gradient,HOG)方法提取特征,通过基于核的主成分分析法进行降维,经支持向量机(support vector machine,SVM)中的分类训练,实现扣件状态检测,该方法提取的冗余特征量过多导致计算时间长。文献融合塔式梯度方向直方图(pyramid histogram of oriented gradients,PHOG)特征和宏观局部二值模式(macroscopic local binary pattern,MSLBP)特征提取扣件特征,用SVM分类器进行分类,其难以提取到完整的扣件边缘。文献采用局部二值模式(local binary pattern,LBP)和SVM的组合模型,对扣件图像进行特征提取与类别判定,但其对非明显纹理扣件图像处理结果不理想。
为了提高扣件状态检测的准确率,本文采用尺度不变特征转换(scale-invariant feature transform,SIFT)特征、Fisher向量和LIBLINEAR分类器对扣件状态进行分类检测。
1 扣件状态检测算法
铁路扣件的常见状态如图1所示。
1.1 SIFT特征
SIFT特征对旋转、尺度缩放、亮度变化等保持不变性,对噪声也有一定抑制,因此是一种非常稳定的局部特征。SIFT特征生成一般情况下包括:1)极值点检测; 2)特征点定位;3) 为特征点分配方向;4)生成特征描述子。
使用高斯卷积核构建高斯差分尺度空间,高斯尺度空间由不同高斯核平滑卷积而成
D(x,y,σ)=((G(x,y,kσ)-G(x,y,σ))*I(x,y))
=L(x,y,kσ)-L(x,y,σ)
(1)

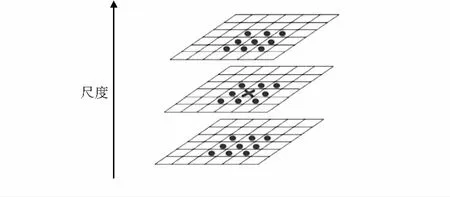
图2 尺度空间极值点检测
1.1.2 特征点定位
在得到潜在的特征点后,需要去除一些低对比度的极值点以及边缘响应点来精确定位特征点,首先对空间尺度函数进行泰勒展开成三维二次函数
4.“问责”强震慑。建立健全监督问责工作机制,对基层党组织和党的领导人员违反党章和其他党内法规,不履行或者不正确履行职责等失职失责情况进行问责,以“有责必问、问责必严”的强烈意识,全面扎紧问责制度的笼子。
(2)

1.1.3 特征点方向分配
找到了特征点需要给特征点的方向进行赋值。利用特征点邻域像素的梯度分布特性来确定其方向参数,再利用图像的梯度直方图求取关键点局部结构的稳定方向,特征点(x,y)处的梯度模值和方向分别为
m(x,y)=(L(x+1,y)-L(x-1,y))2+
(L(x,y+1)-L(x,y-1))2
(3)
(4)
根据邻域点的方向、梯度幅值以及距离特征点的远近构建梯度方向直方图,直方图中峰值所对应的角度即为该特征点的主方向。
1.1.4 特征点描述
将坐标轴旋转为特征点的主方向,以特征点为中心取 的窗口(特征点所在的行和列不取)。图3(a)中的加黑点为当前特征点,每个小格代表特征点邻域所在尺度空间的一个像素,在4×4的图像块上计算8个方向的梯度方向直方图,绘制每个梯度方向的累加值,形成1个种子点,如图3(b)所示。图中1个特征点由4×4共16个种子点组成,每个种子点有8个方向向量信息,可产生4×4×8共128个数据。图4为提取SIFT特征的结果。

图3 生成关键点描述子

图4 提取的SIFT特征点
1.2 Fisher向量
(5)

用EM算法估计高斯混合模型的参数λ,得到高斯混合模型参数的先验值,wi是随机选中第i个高斯分布的概率,另外2个参数为高斯分布的均值和方差。
特征xt由第i个高斯分布生成的概率为
(6)

1.3 LIBLINEAR训练
LIBLINEAR同时支持线性SVM和逻辑回归分类,本文使用LIBLINEAR支持的L2损失函数的线性SVM将扣件状态划分为正常与异常2类。使用训练集中扣件图像归一化后的Fisher向量训练LIBLINEAR分类器。数据集采用集通线铁轨扣件数据,其训练集中正样本10 000张,负样本10 000张。将训练集划分为5个子训练集,5个子训练集分别是2 000张正样本和2 000张负样本,采用5折交叉验证的方法,最终通过实验确定代价参数C=4,迭代停止条件的容忍度。eps=0.01。
2 实验与结果分析
实验运行环境是Intel(R)I5-6300HQ CPU,2.20 GHz,8 GB内存,开发环境为Visual Studio 2012和OpenCV。本文使用的扣件数据集是通过高速扫描相机采集的集通线铁轨扣件数据。集通线共34 000张扣件图像。训练库图像20 000张,其中,正、负样本各10 000张;测试样本14 000张,其中正、负样本各7 000张。
2.1 准确率测试
本文使用的扣件数据集通过高速扫描相机采集的集通线铁轨扣件数据。本文算法在不同数量训练集和测试集情况下的准确率如表1 所示,本文算法的扣件状态检测平均准确率达到98.97 %。
2.2 算法效率
2.2.1 不同方法对比
为了验证实验结果,将本文方法与方向场匹配方法,小波分离+神经网络法处理得到的结果进行比较。实验对比结果如表2所示,可以看出本文的误报率和漏报率均低于其他2种方法。相对于方向场,本文方法法时间稍长,但误报率和漏报率远低于方向场法。相比于小波+神经网络方法,本文方法不仅耗时短,而且误报率与漏报率均低于该方法。本文提出方法的效果最好。

表2 实验结果对比
2.2.2 分类器效率对比
LIBLINEAR支持线性分类,LIBSVM支持线性分类和非线性分类,在线性分类条件下,LIBLINEAR无论是在训练上还是在预测上,均比LIBSVM高效得多。本文通过选用不同样本数进行5组实验,分别采用2 422,4 524,6 978,15 324,20 234张样本数进行测试。实验表明,分类时间上LIBLINEAR速度明显优于SVM和LIBSVM,结果如图5。

图5 不同分类器时间效率
3 结 论
对于扣件状态分类识别问题,利用SIFT特征提取算法提取扣件图像的局部特征,将每幅扣件图像的SIFT特征聚合成Fisher向量,再对Fisher向量进行归一化,最后通过训练的LIBLINEAR分类器对扣件图像做出状态分类,该方法扣件状态识别平均准确率为98.97 %,有较高的识别率及鲁棒性。在后续的研究工作中,为了进一步提高扣件状态识别准确率并充分利用数据集,将考虑将卷积神经网络应用到扣件状态分类识别研究中。
猜你喜欢
高中数理化(2024年1期)2024-03-02 17:52:40
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:40
铁道建筑技术(2020年11期)2020-05-22 06:26:46
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:02
西南交通大学学报(2018年5期)2018-11-08 10:58:08
电子测试(2018年1期)2018-04-18 11:52:35
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:20
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
计算机工程(2015年8期)2015-07-03 12:20:21