实数域广义MUSIC的MIMO雷达低空目标仰角估计算法*
2018-10-26 05:59:24汪安戈胡国平
传感器与微系统 2018年11期
汪安戈, 胡国平
(空军工程大学 防空反导学院,陕西 西安 710051)
0 引 言
将多输入多输出(multiple in multiple out,MIMO)雷达应用于多径效[1,2]应问题将有效地提高系统对目标角度的估计精度[3~5],而MIMO雷达低空目标仰角估计问题也是现今亟待解决的难点之一。
广义多重信号分类(multiple signal classification,MUSIC)算法[6~8]是将直达信号与多径反射信号的合信号看作一个普通信号求信号子空间与噪声子空间,从而对直达波与多径反射波的俯仰角进行联合估计的一类算法。文献[9]中将MIMO雷达可形成虚拟矩阵的特性与广义MUSIC算法相结合,提出一种基于阵元空间的MIMO雷达波达方向(direction of arrival,DOA)估计算法,但计算量很大。文献[10]通过酉变换将空间谱的估计从复数域变换到实数域,提出了一种实数域广义MUSIC算法,虽然降低了广义MUSIC算法的运算量,但需要进行二次角度估计才能得到角度的精确估计值。
本文针对以上问题,提出了一种实数域广义MUSIC的MIMO雷达低仰角估计算法。首先将MIMO雷达得到的虚拟矩阵向量化,从而扩展阵列的虚拟孔径,提高对空间中信号角度的分辨能力,利用酉变换将空间谱估计从复数域转换到实数域,以减少虚拟孔径扩展带来的运算量增大,该算法相对于广义MUSIC算法对多径信号具有更好的角度估计性能,且运算量没有增加太多。计算机仿真证明该算法能够较好地估计低空目标的仰角。
1 多径条件下MIMO雷达信号模型
不同于常规相控阵雷达,MIMO雷达多径信号模型需同时考虑接收多径与发射多径。本文以收发共置MIMO雷达为例,多径情况下MIMO雷达收发信号模型如图1所示。图中虚线为发射信号的多径传播路径,实线为接收信号的多径传播路径,因此,信号从MIMO雷达发射到接收的过程中共有4条路径,即直射—直射,直射—反射,反射—直射,反射—反射。

图1 多径情况下MIMO雷达收发信号示意
设收发共置MIMO雷达为M个各向同性阵元组成的均匀线阵,阵元间距为d,空间中只存在一个低空目标,θd和θr分别为目标直达波与反射波的俯仰角。发射信号时M个阵元的发射矩阵为
SF(t)=[sF1(t)sF2(t) …sFM(t)]T
(1)
则目标接收到的信号为
ST(t)=[aH(θd)+εaH(θr)]SF(t)
=[1ε][a(θd)a(θr)]HSF(t)
(2)
式中a(θd)=[1 e-jβd… e-j(M-1)βd]T为直达波的导向矢量,βd=2πdsinθd/λ;a(θr)为反射波的导向矢量;ε=ρe-j2πΔR/λ为总反射系数,ρ为复反射系数,2πΔR/λ为直达波与反射波路程差引入的相位差。
MIMO雷达接收回波时接收信号矩阵为
X(t)=[a(θd)+εa(θr)]αST(t)+N(t)
=α[a(θd)a(θr)]ωωT·
[a(θd)a(θr)]HSF(t)+N(t)
(3)

在MIMO雷达中,已知发射信号矩阵为SF(t),则可对接收信号进行广义匹配滤波,得M×M维拓展虚拟矩阵为
Y(l)=E[X(t)SF(t)H]=A(θ)ωωTA(θ)H+V(l)
(4)
2 基于广义MUSIC的MIMO雷达低仰角估计算法
依据Kronecker(KR)积变换理论对式(4)所示的虚拟矩阵进行向量化
y=vec(Y)=

([a(θd)a(θr)]*⊗[a(θd)a(θr)])·
[1εεε2]Ts+W
=A′(θd,θr)βs+W
(5)

A′(θd,θr)=[a(θd)a(θr)]*⊗[a(θd)a(θr)]
=[a*(θd)⊗a(θd)a*(θd)⊗a(θr)
a*(θr)⊗a(θd)a*(θr)⊗a(θr)]
(6)
由式(5)可求得向量化后虚拟矩阵的协方差矩阵为
(7)

由于低空目标的直达信号与对应的反射信号相干,有
ZA′(θd,θr)β=0
(8)

FM-GMUSIC=(θ1,θ2)
(9)
式中A′(θ1,θ2)=[a(θ1)a(θ2)]*⊗[a(θ1)a(θ2)]。利用式(9)进行二维搜索绘制空间谱,求得直达信号与反射信号的波达方向,称该算法为M-GMUSIC算法。
3 实数域广义MUSIC的MIMO雷达低仰角估计算法
利用酉变换将空间谱估计从复数域转换到实数域,降低广义MUSIC的MIMO雷达角度估计算法(generalized MUSIC in MIMO radar,M-GMUSIC)算法复杂度,以减少算法增加运算量[10]。
定义i×i维变换矩阵Ji,其中除反对角线上的值为1,其余均为0。定义酉变换矩阵[11],其中下标为维数为

(10)


=Re(UHRyU)
(11)
同理,对A′(θ1,θ2)进行酉变换得到实导向矢量矩阵
(12)
根据式(9)可得实数域下该算法的空间谱为
(13)
式中EM2U为对实协方差矩阵RU进行特征分解得到的实噪声子空间,其分解过程与复矩阵相比运算量降低。同理,对式FM-UGMUSIC(θ1,θ2)进行二维搜索绘制空间谱,并找到空间谱中的最大值点,即可求得直达信号与反射信号的仰角,称该算法为实数域广义MUSIC的MIMO雷达低仰角估计算法(low-angle estimation algorithm in MIMO radar via generalized real domain MISIC,M-UGMUSIC)。
实际中,Ry计算公式为为快拍数,y(l)=vec[Y(l)]。
M-UGMUSIC算法的步骤如下:
1)根据式(4)进行广义匹配滤波,计算虚拟矩阵Y;
2)根据式(5)将虚拟矩阵Y向量化,并计算协方差矩阵y;
4)由式(14)进行二维搜索,绘制空间谱,并找到空间谱中的最大值点,即可得到直达与反射信号的仰角估计值。
4 仿真实验
仿真实验中,设收发共置MIMO雷达与常规阵列雷达均为阵元数M=8的垂直均匀线阵,阵元间距为信号波长的0.5倍,且MIMO雷达各个阵元发射相互正交的信号。为了检验该算法在多径情况下的DOA估计性能,通过实验将M-UGMUSIC算法、M-GMUSIC算法和广义MUSIC算法的性能进行了比较。
假设直达信号与反射信号的来波方向分别为θd=2.5°和θr=-2.5°,总反射系数ε=0.8ej160°/180°π。图2~图7为3种算法在快拍数L为200次,信噪比(signal to noise ratio,SNR)为10 dB情况下的空间谱估计结果。
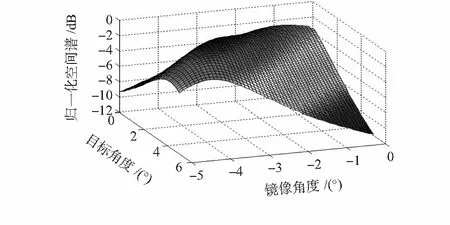
图2 广义MUSIC算法空间谱

图3 广义MUSIC算法空间谱等高线
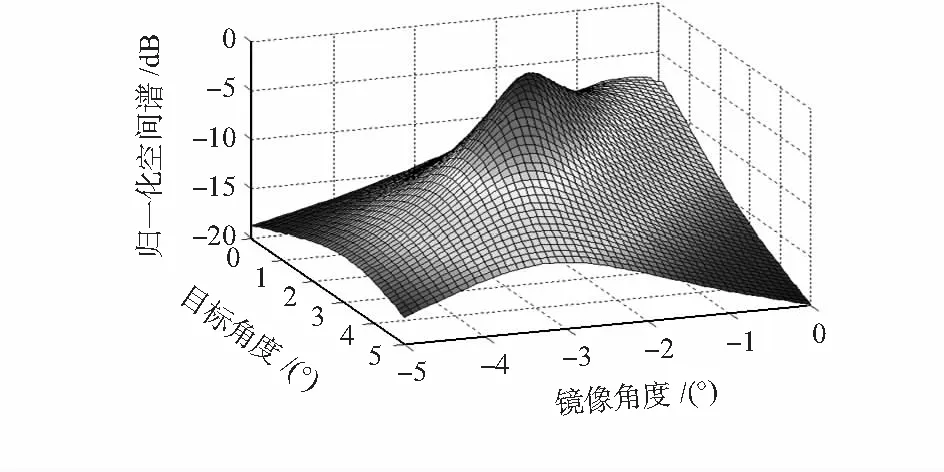
图4 M-GMUSIC算法空间谱

图5 M-GMUSIC算法空间谱等高线

图6 M-UGMUSIC算法空间谱
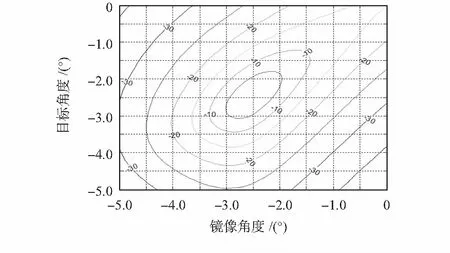
图7 M-UGMUSIC算法空间谱等高线
由各算法的空间谱可知,广义MUSIC算法的估计值分别为3.52°和-3.25°;M-GMUSIC算法的估计值分别为2.5°和-2.55°;M-UGMUSIC算法的估计值分别为2.51°和-2.55°。可知,M-UGMUSIC算法较广义MUSIC算法对于多径信号能更精准的估计出目标与镜像仰角,虽然运算量有所提升。M-UGMUSIC算法与M-GMUSIC算法相比估计精度相近,但M-UGMUSIC算法运算量更小。
图8为快拍数L=210,SNR由-10~12 dB变化,Monte Carlo仿真次数为200时3种算法的均方根误差。
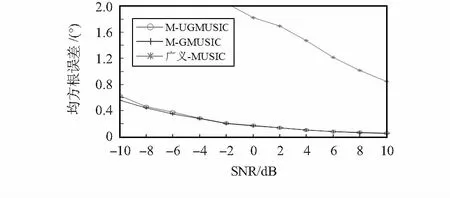
图8 不同SNR时的均方根误差
可知,随着SNR的增大,各算法的精度都得到提高。但与广义MUSIC算法相比,M-UGMUSIC算法对多径信号波达方向的估计精度明显更高,对低空目标仰角估计性能更佳;M-UGMUSIC算法与M-GMUSIC算法相比,两者的角度估计精度相差不大,只有在低SNR情况下,相较于M-GMUSIC算法,M-UGMUSIC算法精度略有下降,但M-UGMUSIC算法运算量要更小。
图9为SNR为10 dB,快拍数由30~300变化,Monte Carlo仿真次数为200时3种算法的均方根误差。
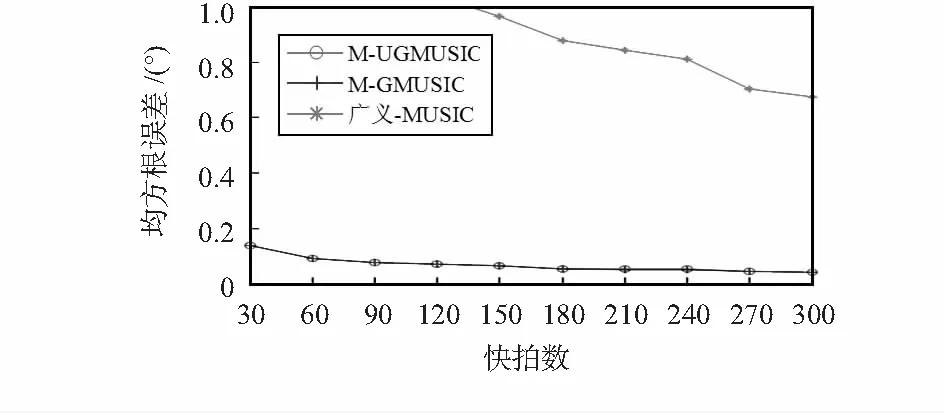
图9 不同快拍次数时的均方根误差
可知,随着快拍数的增加,样本数量的提升,各算法的精度都得到提高。但对比3种算法,不同快拍次数情况下M-UGMUSIC算法明显比广义MUSIC算法均方根误差要小得多,多径信号角度估计性能更好;M-UGMUSIC算法与M-GMUSIC算法的角度估计精度几乎相同,但M-UGMUSIC算法的运算量更小。
5 结 论
本文针对多径情况下MIMO雷达低空目标仰角估计问题,提出了一种实数域广义MUSIC的MIMO雷达低仰角估计方法。该算法相对于基于一般阵列雷达的广义MUSIC算法对多径信号具有更好的角度估计性能,即使在多径信号与直达信号相互削弱时仍具有很高的精度,且运算量没有增加太多。最后仿真实验显示,本文算法可以对低空目标进行有效地仰角估计。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:45:16
初中生世界·九年级(2020年2期)2020-04-10 06:47:22
中学生理科应试(2019年3期)2019-07-08 03:54:24
湖南教育·C版(2018年3期)2018-06-05 16:54:36
中学生数理化·七年级数学人教版(2018年3期)2018-05-30 06:58:13
中学生数理化·中考版(2017年3期)2017-11-09 02:07:30
福建中学数学(2016年7期)2016-12-03 07:10:28
科技视界(2016年15期)2016-06-30 12:48:10
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
意林·少年版(2011年4期)2011-07-06 05:07:01