民用渔船雷达动态组网的避障连通恢复方法
2018-10-24 02:28
电讯技术 2018年10期
(重庆邮电大学 光通信与网络重点实验室,重庆400065)
1 引 言
目前,国内外对雷达组网做了大量的研究工作,主要分为以下几个方面:雷达组网探测能力、“四抗”能力、优化布站、系统误差校正、信息融合、雷达组网结构、雷达组网通信[1]。文献[2]对组网雷达点迹信息融合进行研究,其目的是为了有效地辨别真假目标。其他类似文献也大都是利用组网中多个雷达信息的融合,减少雷达检测的误差,提高辨别能力[3-4]。
然而,随着民间航海事业的爆发式发展,民用航海雷达已经成为雷达消费市场的主力军。对于海洋民用雷达组网而言,由于海洋范围辽阔,渔船数量较多,大都以“小集体”的方式分布在沿海不同区域,且民用渔船位置不固定,形成的整体网络处于动态变化中,因此这些技术在处理民用渔船避障连通方面存在较大的局限性。如果能通过对渔船雷达配置各类传感器的方式,让每一条船都成为移动的“观察哨”和“采集点”,则可以对整个海域的渔船形成一个避障连通的网络。文献[5]中提出利用斯坦纳生成树(Steiner Tree,ST)解决分割网络的连通问题,并证明了该问题为NP问题。目前,针对网络分割重连的方法有以下几种:一种解决方法是利用移动数据收集器(MDCs)实现网络的间歇性连通[6-7],但这种方法最大的缺点是由于等待而造成数据延迟;另一种解决方法是在各分区之间分配中继节点进行持续性连通[8]。为了节省中继节点,现有的改进方法是将分区等效成点构建最小生成树,利用最少的中继节点实现网络的恢复[9-10],但此方法必须假设中继节点可以随意放置,且未考虑中继节点的移动能力、分布情况等因素。文献[11]提出了一种CIST算法,该算法主要通过边界传感器构建三角形的方式,利用最少的中继节点实现分区的连通,但在整个算法的实现过程中,没有考虑中继节点的分布和其移动能力。文献[12]则是通过用3种改变拓扑结构的算法与扩展匈牙利方法相互结合,解决了静态目标节点的覆盖和网络的连通问题,使得节点在整个运动过程中功耗最小,但该算法的缺点是只做了对有限静态目标节点的覆盖研究,未对整个网络进行覆盖检测。本文在考虑障碍物的情况下,针对不相交海域中的渔船群提出了一种避障连通恢复的方法,能够在较小的能量消耗下,将散布在广大海域的不同“小集体”整合为互相连通的网络,这样就能有效地扩大民用渔船的探测范围,提高雷达组网的信息融合能力。
本文简单分析了数据融合和渔船动态组网的可行性,针对不同区域中渔船无法连通的情况,重点分析了避障连通恢复的方法,保证不同区域中的“渔船群”能形成互相连通的网络,有效提高了海域的覆盖率和连通率;最后给出了相应的实验数据和仿真结果。
2 远洋渔船信息融合可行性分析
本文首先探索远洋渔船上各传感器信息融合的可能性。假设传感器节点初步具备射频、视频、声测和目标属性等信息获取能力,这些节点分类采集海洋环境和地形地貌等相关数据。根据渔船出行规律,构建优化组网的策略,实时分级处理后,经卫星链路、技术卸载等手段向岸基信息中心推送,形成海洋综合信息数据库。
2.1 系统组成
海洋综合信息系统由岸基数据处理中心和海上信息节点组成,如图1所示。海上信息节点由9个模块构成,提供单一节点获取的各类信息,主要包括水深、地形、风、温、湿、压,雷达探测目标回波,周边目标动态和属性,以及红外、可见光图像视频信息等海洋物理和目标综合信息。数据处理中心接收各类信息,对其进行分类清洗、存储、挖掘及信息的融合,从而形成整个海域的水文、态势数据库。

图1 海洋综合信息采集及处理系统Fig.1 Integrated marine information collection and processing system
传感器电压模拟信号经滤波、转换和校验处理后形成数字信号,由串口传送至大容量数据存储器,船内数据传输采用以太网协议栈、UDP传输方式、数据标准封装打包后经鑫诺Ku频段卫星、光纤百兆网或CDMA/GPRS完成岸海间的信息交互。信息处理实现了立体监测、数字采集和网络传输的嵌入式采集传输方式,多通道并行,采集高效,抗干扰性强;同时,岸基数据处理中心通过内网实现传感器开启、间隔设置等控制和调度服务。
2.2 信息融合框架
2.2.1节点结构设计
对于渔船节点而言,节点的信息采集和传输功能如图2所示。
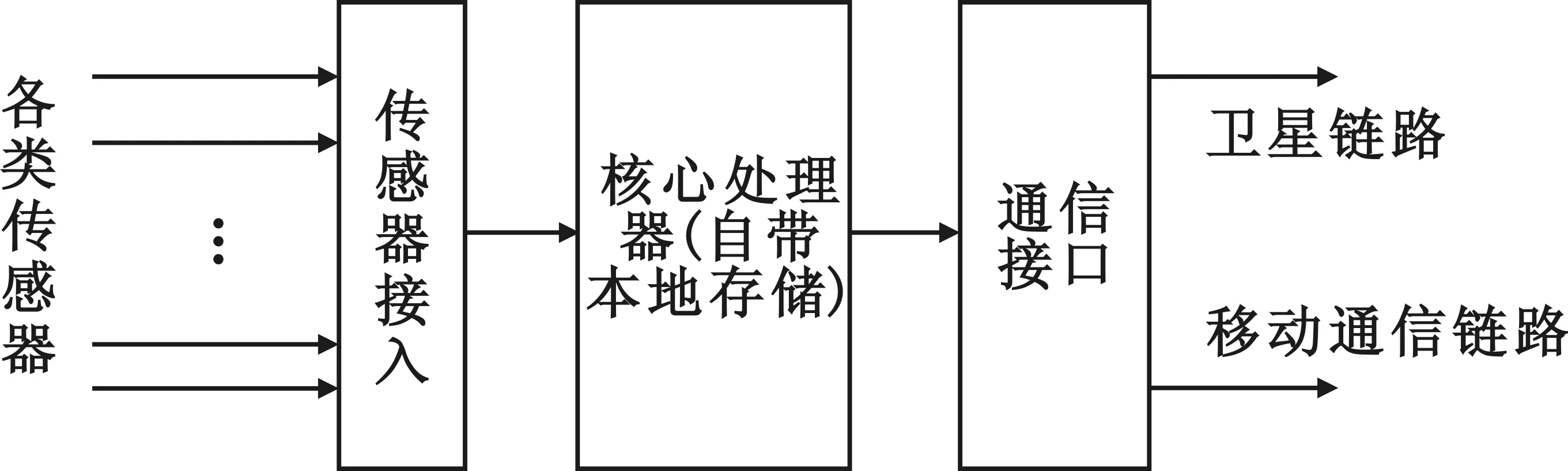
图2 船上系统框架图Fig.2 System diagram
传感器接入模块负责将各类数据进行整理、编码,传入核心处理器的本地存储空间。核心处理器负责协调各接口并对不同类型的数据按规范进行封装。通信接口对实时数据利用卫星链路进行传输,而非实时数据则在船舶围港后进行转发。
2.2.2数据模型构建
构建数据中心平台的主要研究内容有:
(1)数据接收管理平台,主要负责各船只数据的接收、校验、分类保存及数据预处理。
(2)数据处理平台,利用机器学习或大数据技术构建模型算法库,主要完成数据的分类、预测机制构建、聚类分析、关联规则、时序模式构建、偏差检测、智能推荐等处理功能,具体流程如图3所示。

图3 模型库构建流程图Fig.3 Flow chart of model library building
(3)数据展示模块,对数据处理后的结果进行可视化展示,包括各类雷达、单船轨迹、气象水文及其他态势的数据分析结果。
3 一种基于分割网络的避障连通恢复方法
以某海域为例,由于部分渔船之间距离较远,超过了船载通信设备的通信距离,使得海域被彼此被分割,渔船以“小集体”的工作方式分布在不同区域,因此,需要一种避障连通恢复方法,从而最大限度地提高海域的覆盖度和连通度。
为了有效地进行分析,每艘渔船都被视为一个配置有不同传感器的节点,根据功能的不同,分为普通节点和中继节点(可以根据实际要求对两类节点进行配置)。因此,上述问题将转化为一个无线传感网络由S={s1,s2,…,sn}个普通传感器和M={m1,m2,…,mN}个中继传感器组成。由于一些原因(台风、鱼讯等),被分割为P={P1,P2,…,Pk}个独立的分区,且分区之间存在障碍物。系统模型如图4所示,实心方块表示中继节点,空心圆表示普通传感器,分区之间存在3种不同的障碍物。

图4 基于MST的避障恢复算法Fig.4 Obstacle avoidance recovery algorithm based on MST
为了更符合实际场景,本文在执行恢复算法时有如下假设:
(1)网络中的中继节点在正常时可视为普通节点,当中继节点按照调度要求到达指定位置,其状态可按需激活;
(2)普通传感器的通信半径为r,中继节点的通信半径为R,且中继节点具有有限的移动能力和更强的通信能力;
(3)根据实际场景中的情况可知,移动节点的通信不能穿越障碍物。因此,本文假设中继节点在移动过程中不能跨越障碍物,只能通过合理的路径选择绕过它。
3.1 问题描述
针对恢复过程中的问题,本文进行如下描述:
定义1:如果两个分区Pi和Pj之间存在最小生成树边Ewv,其中w∈Pi,v∈Pj,称w、v为边界传感器或者接口节点。边界传感器之间的连线是两个分区之间的最短边[11]。
定义2:连通分区Pi和Pj所需的最少移动中继节点数为
(1)
式中:「·⎤是上限函数,r是普通传感器的半径,R是中继节点的半径,w和v是边界传感器。
定义3:连通分区Pi和Pj的移动中继节点的最佳位置为Point(w,v):
(2)
式中:L为定义2中所求的连通Pi和Pj的中继节点数量,Point(w,v)={p1,p2,…,pL}表示L个移动中继节点的最佳位置,将w和v的位置用p0和pL+1表示。
定义4:中继节点的总移动距离
(3)
式中:(mL,PointL)表示每条最小生成树(Minimum Spanning Tree,MST)边上所有中继节点与最佳移动位置之间的距离。由于网络被分割为k个分区,因此需要k-1条MST边恢复连通。
3.2 避障连通恢复算法的实现过程
针对现有重连算法中未对中继节点的分布情况及移动能力等因素做具体考虑,本文提出了一种避障连通恢复算法,克服了传统方法的不足。
3.2.1构建避障最小生成树
基于MST的避障恢复算法如图4所示,红色多边形点为被激活的障碍物边界关键节点,黑色多边形点为中继节点的最佳移动位置,虚线表示中继节点的移动路径。在该恢复算法执行过程中,共激活了5个障碍物关键节点,所需移动的中继节点数为9个,分别为{m2,m3,m4,m5,m7,m8,m10,m11,m13},其余节点处于休眠状态。
图4所示的基于MST的重连算法没有考虑中继节点的移动能力,只考虑了连接的最短距离,且它是在不改变接口节点的前提下实现避障重连。
3.2.2优化避障路径
得到基于MST的避障路径后,本小节将通过分析中继节点的移动能力和分布情况对避障路径进一步优化。在保证避障恢复路径较短的条件下,使中继节点实现最短的移动,从而实现分割网络的节能避障连通,具体的实现过程如图5所示。

图5 避障恢复算法的优化Fig.5 Optimization of obstacle avoidance recovery algorithm
图5中每个分区边界的红色圆点表示基于MST算法选择的边界节点,绿色圆点表示优化后选择的边界节点。优化后的方法不但替换了部分边界节点,而且对避障最优路径的选择也进行了相应的改变,例如在P4的接口节点改变之后,障碍物3的避障路径由障碍物的右边替换为左边。在优化后的避障恢复算法中,共激活了4个障碍物边界关键节点,比基于MST算法少1个,因为在障碍物1的避障恢复过程中,由于分区P2接口节点的改变,使得恢复时少激活一个关键点,而在此过程中需要移动10个中继节点{m2,m3,m4,m5,m7,m8,m9,m10,m12,m13}。与基于MST算法相比,在连通P3和P5时,由原来的{m11}替换为{m9,m12},因此多移动了1个中继节点。其他中继节点的选择虽然没有替换,但在考虑中继节点移动能力的前提下,对避障路径进行了相应的优化。
3.2.3算法实现的伪代码
基于分割网络的避障连通恢复算法如下:
Input:S={s1,s2,…,sn},M={m1,m2,…,mn},P={P1,P2,…,Pn},中继节点的最大移动能力Cm。
Output:分割网络的连通恢复方案;
G=(V,E); % V 为边界传感器集合,E={(si,sj)|si,sj来自不同的Pi};
初始化:通过距离确定每个分区的边界传感器集合V,连接不同分区边界传感器的边构造集合E,所需移动的中继节点集合MR初始值为空;
G′=(V′,E′),V′,E′←∅;
ForE中的每条边Eijdo
计算连通该边所需中继节点的移动消耗C
IfEij与障碍物相交 then
通过图4和图5的方法规划路障路径,通过3.1节中的描述寻找中继节点最佳移动位置PointL;
For 每个PointLdo
If ∃mk能够到达PointL(即Cm E′←Eij+E′; V′←(si,sj)+V′; MR←MR+mk; V′←V′+MR; Else E←E-Eij; End End cnt←0 G+=(V+,E+),V+,E+←φ; 将E中的边按权重C升序排列; ForE′ij=minE′ do cnt++; Ifcnt=k-1 orE′遍历完成 Break; End; IfG+=(V+,E+) =∅(不连通) then 该分割网络无法连通; Else 利用G+=(V+,E+)的策略进行分割网络连通; End 本算法通过考虑分区的形状、中继节点的分布和移动能力等因素,构建分割网络的较优避障恢复路径,使中继节点在有限能量的限制下,尽可能地实现分割网络的连通。 图6是在我国某海域附近构建的数据融合中心实验阶段的平台展示图,图中的三角符号是AIS回传结果,圆型符号是岸基雷达的显示结果,文字是某一目标船的具体位置。可见,渔船上的AIS、雷达和GPS数据能够自动回传,并融合显示。如果渔船数量众多,可以构建整个沿海的数据库和态势图,对于实现区域调度是完全可行的,为后续的避障连通算法研究提供了坚实的基础。 图6 多传感器数据融合结果显示图Fig.6 Multisensor data fusion results display 由于现阶段渔船改造尚未完成,对于避障连通恢复算法只能通过仿真来验证。本文改变分区数量,通过连通成功率和中继节点的总移动距离两个性能指标,对所提算法的有效性进行验证。 仿真基于Windows10操作系统完成,采用Matlab2016b作为仿真平台,具体的计算机配置为Intel Core i3,3.7 GHz处理器,8.00 GB RAM。具体的仿真参数如下:覆盖区域为800 km×300 km,普通传感器的通信半径(雷达作用距离)r=12 km,中继节点的通信半径R=24 km,中继节点的最大移动能力为Cm=35 km/h(一般不超过20 kn),普通节点数为n=4 000,中继节点数为N=φ×n(φ=5%,10%,15%),使普通节点和中继节点随机失效,直到网络被分割为K个分区,K=2,3,…,9,且涉及到的两个性能指标为平均所得。 本文与文献[11]中的CIST算法和文献[12]中的ECST-H算法进行了比较。CIST是针对MST算法的优化改进,主要通过边界传感器构建三角形的方式,利用最少的中继节点实现分区的连通,而ECST-H算法是基于MST的最短路径实现网络的重连。 图7通过改变中继节点和分区的数量,验证了本文算法的连通成功率。 图7 不同算法的连通成功率比较Fig.7 Comparison of success rates among different algorithms 从图7可知,在中继节点数量不变的情况下,随着分区数量的增加,3种算法的连通成功率均下降,但本文算法下降缓慢,连通成功率至少在70%以上。这是由于本文算法考虑了分区的形状和中继节点的分布,在中继节点能量受限的情况下,本文算法总能找到较优的中继节点进行移动,特别当分区数量较大时,本文算法能选择最优路径和最佳移动中继的优点尤为突出。当分区数量不变时,随着中继节点数量的增加,3种算法的连通成功率随之增加,但当中继数量较少时,本文算法的连通成功率较高。 在实际应用中,节点运动耗能远远大于数据转发的耗能,因此本文通过移动距离代替中继节点的能耗,数据转发的耗能不做考虑。在不同分区数量下,中继节点所需移动的距离如图8所示。 图8 不同算法的总移动距离比较Fig.8 Comparison of total distance traveled by different algorithms 从图8可知,当中继节点数量一定时,随着分区数量的增加,3种算法的总移动距离随之增加,但本文算法的总移动距离始终低于同等条件下的CIST和ECST-H算法。当分区数量不变时,随着中继节点数量的增加,3种算法的总移动距离随之减小,因为中继节点越多,移动时的选择也就越多。 随着我国对海洋权益的日益重视,伴随大数据技术的高速发展,将民用渔船的雷达、通信等传感设备所获取的信息进行数据融合,可以大大地扩展对相关海域的探测、监控及态势分析的能力。将海域中动态分布的渔船看作工作范围内的传感器节点,在最小消耗的情况下,将分布在各个区域的“小渔船群”进行动态组网,使它们整体实现避障连通,能够对个体的数据进行有效整理、融合。本文的研究主要致力于如何在分割的海域中,通过考虑中继节点的移动能力和分布情况,选择消耗函数较小的中继节点进行渔船网络的重连,以最小的代价进行恢复,使得连通成功率、节点总移动距离等性能得到了较大提升。4 实验结果

4.1 网络连通成功率

4.2 中继节点的总移动距离

5 结束语
猜你喜欢
环球时报(2022-03-29)2022-03-29
廉政瞭望(2021年15期)2021-08-23
商周刊(2018年19期)2018-12-06
知识经济·中国直销(2018年7期)2018-07-27
电信科学(2017年6期)2017-07-01
小学科学(学生版)(2016年5期)2016-12-05
航天器工程(2015年3期)2015-10-28
电测与仪表(2015年8期)2015-04-09
电测与仪表(2015年7期)2015-04-09
电子设计工程(2015年16期)2015-02-27