
一种基于气体激励的小行星采样过程仿真分析与试验研究*
2018-10-24 02:21孙启臣刘晓庆王露斯刘德赟秦俊杰
新技术新工艺 2018年9期
孙启臣,赵 曾,刘晓庆,王露斯,刘德赟,秦俊杰,曾 婷
(北京卫星制造厂有限公司,北京 100094)
近年来,世界各空间大国掀起了太阳系深空探测的热潮,深入地研究各天体的地质特性,探索行星系统的形成和演化历史[1]。小行星是46亿年前太阳系初期形成的行星体,内部蕴含了大量太阳系早期形成和演化的信息[2];是人类了解太阳系起源演变的重要载体,同时小行星含有丰富的贵金属及稀有元素,具有巨大的利用价值[3]。目前,在大量近地小行星(即LL球粒状陨石)中已经识别出了高品位的铂族金属元素矿床,小行星还可能含有太空旅行者希望能找到的最珍贵资源——冷冻水[4],因此,对小行星进行采样探测具有重要的科学与工程意义。成功开展或正在实施小行星探测任务的国家和组织有美国、欧洲和日本,并已完成“罗塞塔”“隼鸟”等探测任务[5-7]。目前,小行星采样已成为国内外深空探测的研究热点。
小行星表面重力很小,要在其表面实现长期着陆非常困难,采样过程施加的力可能将探测器推离小行星,这一特征决定了难以应用传统的钻孔取样、挖掘取样等方法,需要采用新型的、采样作用力小的取样方式。另外,小行星距地球遥远,且目前的技术水平限制了探测器所带燃料的数量,所以取样系统还应轻型化和小型化[8-10]。
气体激励采样是一种新型的地外天体采样技术,美国Osiris-Rex小行星采样返回任务也将应用气体激励方式进行Bennu小行星表面采样。气体激励采样方式的优点在于可通过较少的活动部件获取可观的样品量,保持其原位性能,并且采样器无需采用电动机,具有轻质小巧、能耗低、反作用力小和采样效率高的优点,是一种可适应未来小行星采样探测的新技术和新方法。
1 采样器基本原理与系统组成
1.1 采样器基本原理
气体激励采样器采用气体激励模块与破岩机构复合的设计,整体构型如图1所示。破岩机构可增强星表的破碎程度,气体激励采样器通过高压气流将星表风化层与破岩碎屑吹进初级封装容器,并完成初级封装。采样器可以适应短时接触采样,具有采样时间短、星表适应性强、可重复采样和采样可靠等特点。
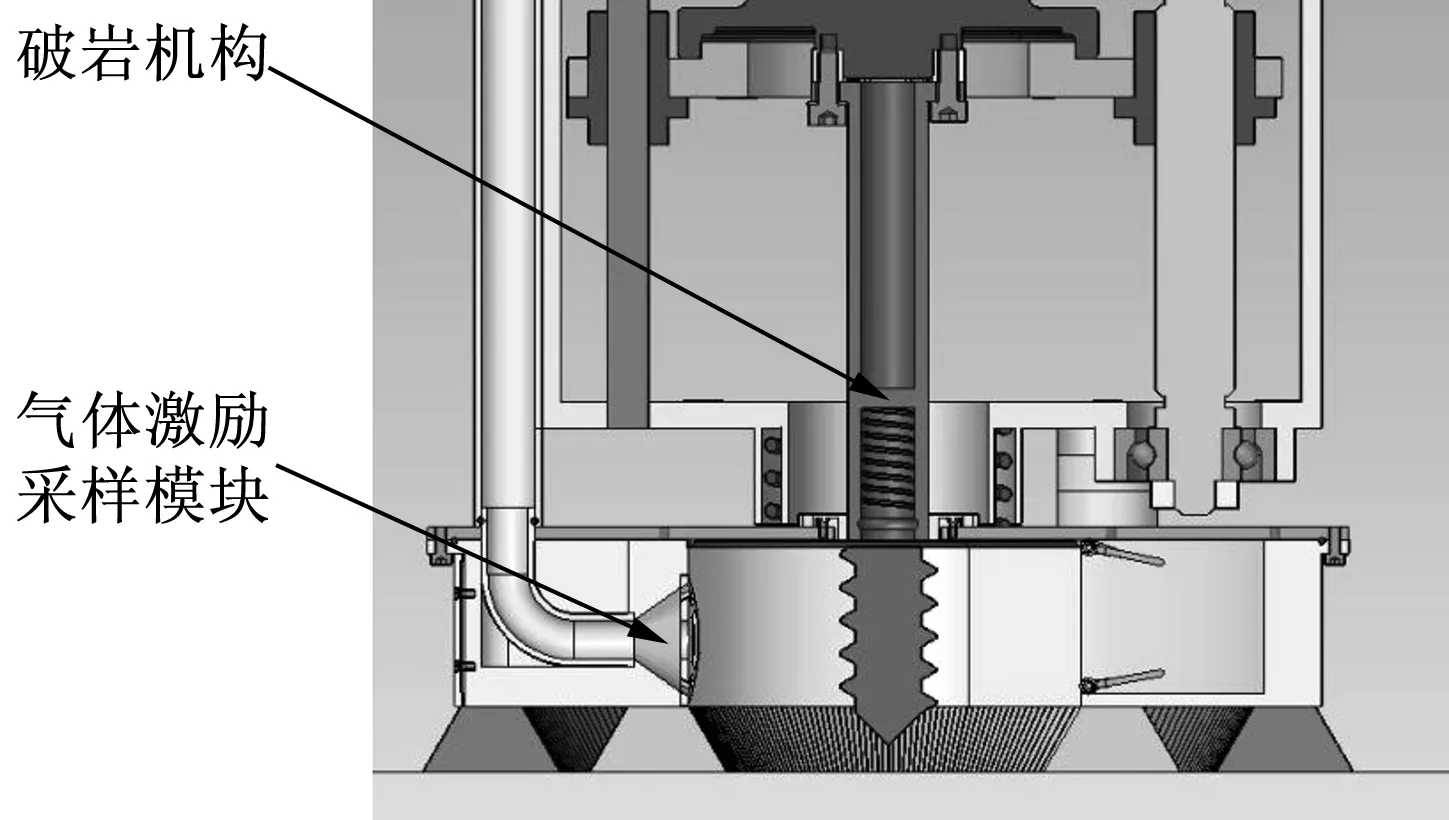
图1 气体激励采样器整体构型
1.2 气体激励采样模块系统组成
气体激励采样模块主要由初级封装容器主体、初级封装容器上盖、气流入口和气流出口等组成(见图2)。该采样器构型将收集气路、初级封装容器集成至一起,并为破岩机构提供辅助支承。入口气路为1路,流道采用近似一维通道设计,有利于气流顺畅流通,使收集简单、可靠。
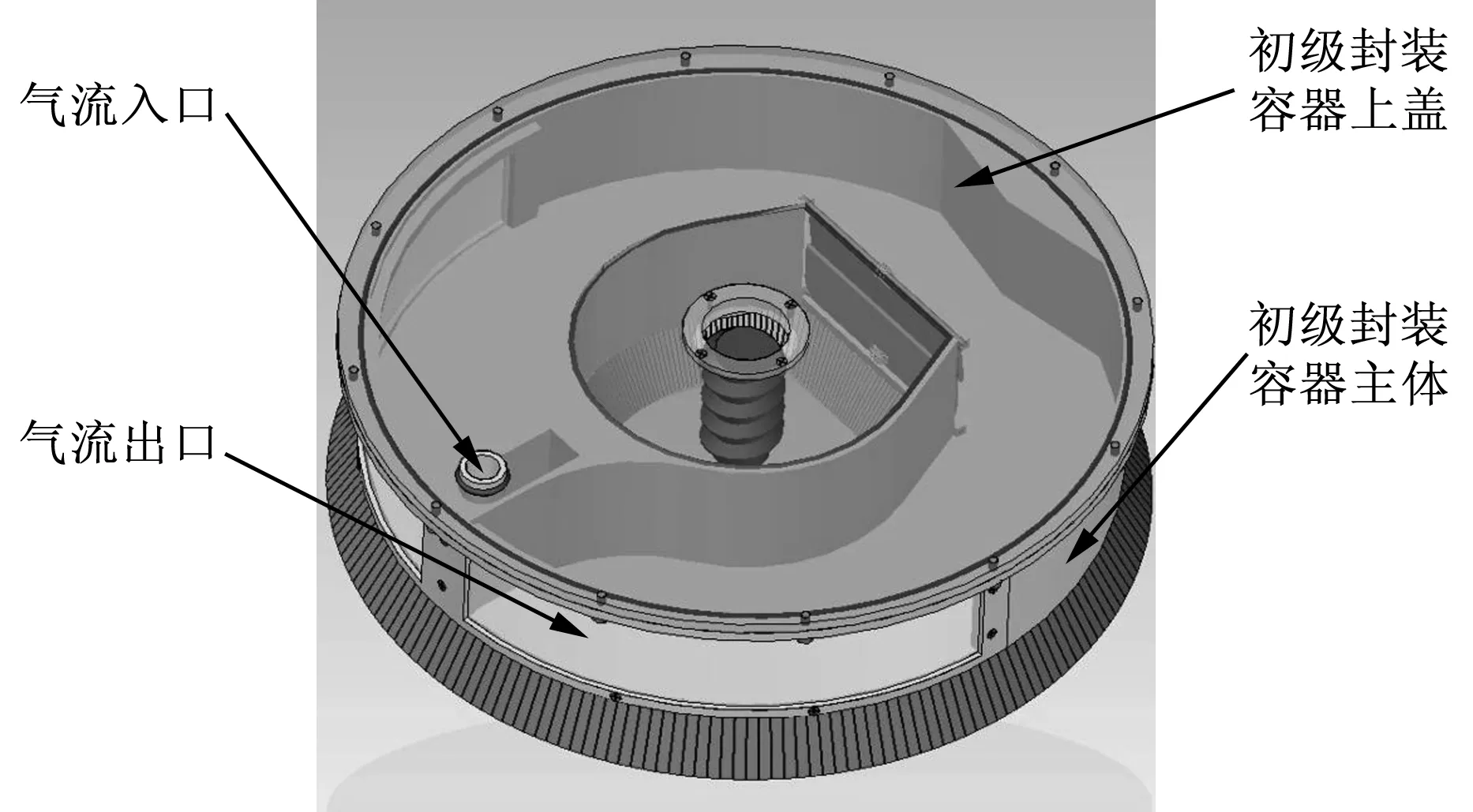
图2 气体激励采样模块系统组成
2 采样过程仿真分析
2.1 分析方法
采用流固耦合的仿真方法,实现气体与固体颗粒相互运动的过程仿真。气体入口压力约为0.4 MPa,气体在容器内的流动属于紊流态,因此采用标准k-ε双方程湍流模型对气体流动进行非稳态模拟,各方程求解采用二阶离散格式,两侧环形面出口压力为环境气压,其他为无滑移的固体壁面边界。本次计算时间步长为2.5×10-5s,气体激励总时长为3 s,即计算总时长为3 s。
2.2 离散元计算边界设置
本文所研究的固体颗粒是直径为1 mm的球体,密度为2 700 kg/m3,泊松比为0.3,剪切模量为30 GPa;容器材质为铝合金,其密度为2 800 kg/m3,泊松比为0.33,剪切模量为30 GPa。考察在微重力环境(10-5m/s2)和重力环境(9.8 m/s2)下,颗粒受气体激励,容器对颗粒的采集效率。本文研究的颗粒数为100个,随机分布在容器底面,作为t=0 s时刻在空间中的分布状态(见图3)。颗粒在运动过程中,存在颗粒与颗粒、颗粒与容器壁面接触碰撞,形成接触力,本文选取Hertz-Mindlin无滑移接触模型对颗粒运动规律进行仿真。
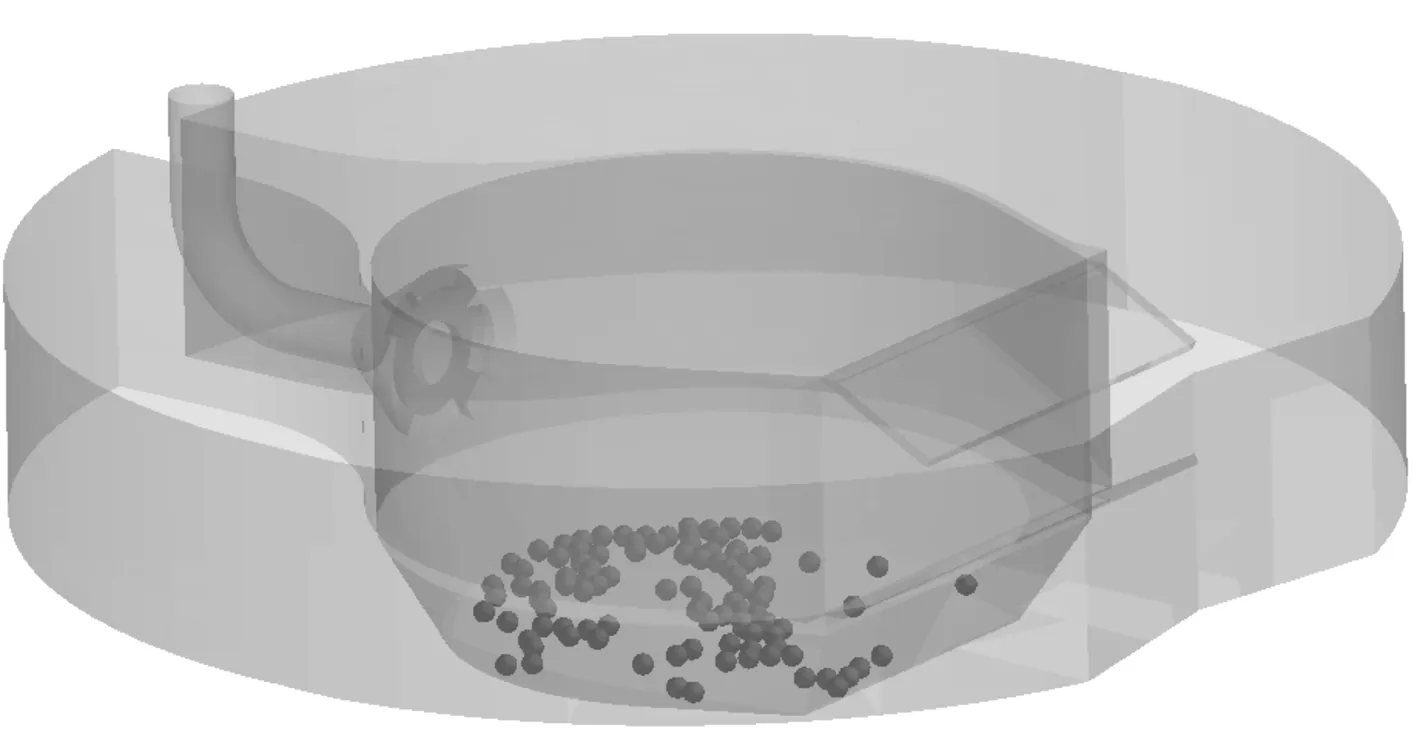
图3 颗粒随机分布示意图
2.3 仿真分析结果
容器挡板高度方向中间截面速度分布云图及容器气体流线图如图4所示。从图4中可以看出,容器两侧气体速度分布及流线轨迹基本对称分布,同时在容器中心区域及底部区域形成了强烈的漩涡,当气体流出封装密闭门外时,通过封装密闭门向两侧出口流动,且气流流通方向与设计一致,流通过程顺畅,无流动死区。
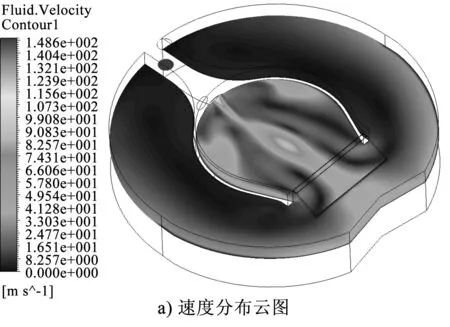
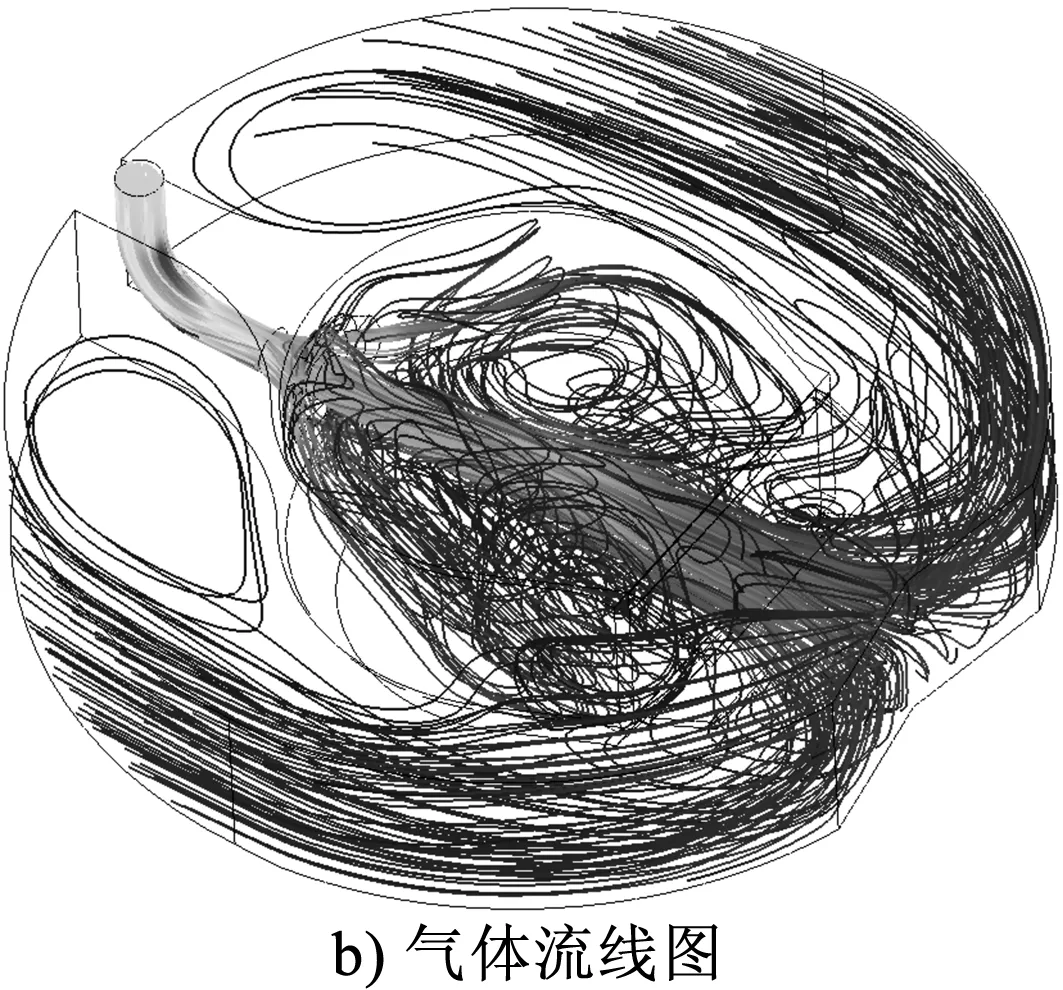
图4 封装密闭门方向中间截面速度分布云图及气体流线图
容器对称面的速度和压力分布云图如图5所示。从图5中可以看出,气体流速最大达到约689 m/s,在容器中间区域速度仍可达约190 m/s,气体冲击容器下表面,该底部区域的气体速度明显较其他区域要低。通过数据处理可得,容器底部圆形面所受气体激励时的法向合力约为3.3 N,反作用力较小。
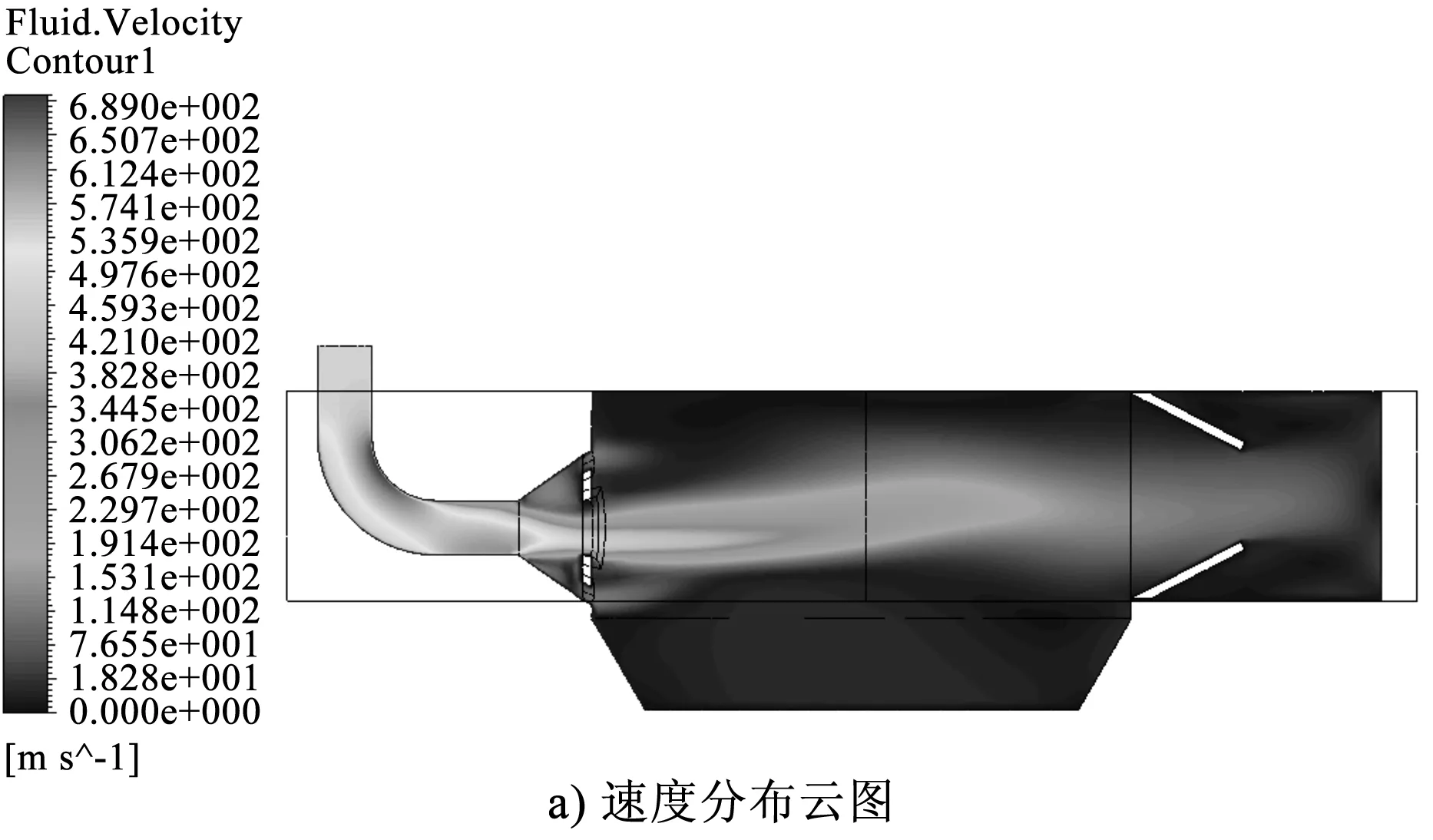

图5 容器中心对称面速度和压力分布云图
微重力和重力环境下颗粒在不同时刻时的运动状态分别如图6和图7所示。从图6和图7中可以看出,在相同时刻,微重力环境下颗粒的运动行程较重力环境下要长,且进入容器采集装置的颗粒数量要多于重力环境。

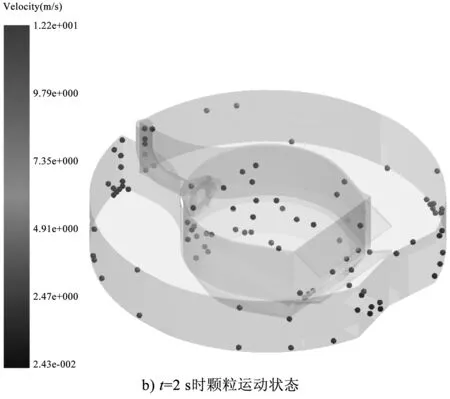
图6 微重力环境下不同时刻颗粒运动状态
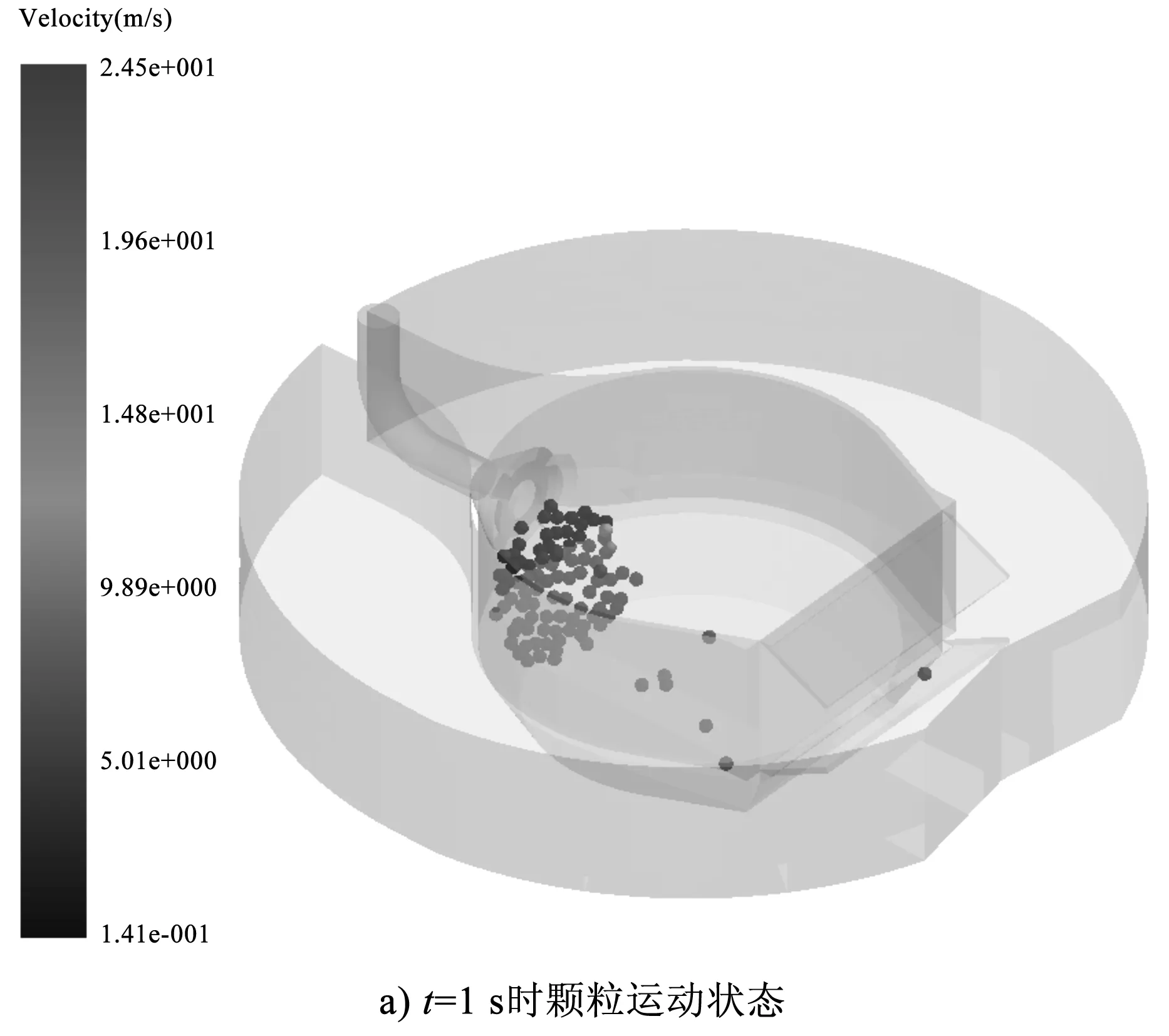
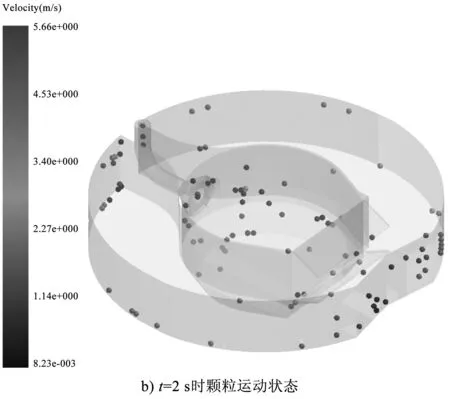
图7 重力环境下不同时刻颗粒运动状态
气体激励总时长为3 s时,仿真分析得到的颗粒采集统计结果见表1。从表1可以看出,在相同气体激励时间下,微重力环境下的颗粒采样效率约比重力环境下高10%。
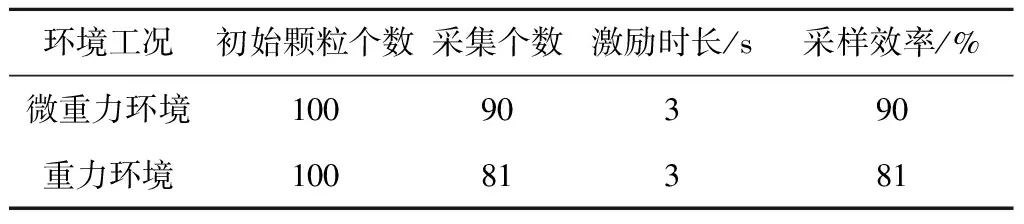
表1 仿真分析颗粒采集结果
3 采样性能试验研究
基于前期理论与仿真分析,研制了采样器原理样机(见图8),并搭建了气体激励颗粒采样试验平台。在地面重力下开展了采样性能试验,以天然玄武岩的自然表面来模拟具有一定凹凸不平度的小行星表面。
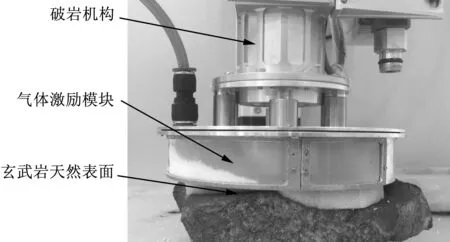
图8 气体采样器原理样机
分别针对微重力颗粒(密度为0.9 g/cm3)、1~2 mm颗粒和4~10 mm颗粒进行采样测试。试验时将待收集样品置于采样器中部,采样器对玄武岩天然表面正压力为10 N,气体入射气压为0.4 MPa,激励时长为3 s。采样测试结果如图9所示。

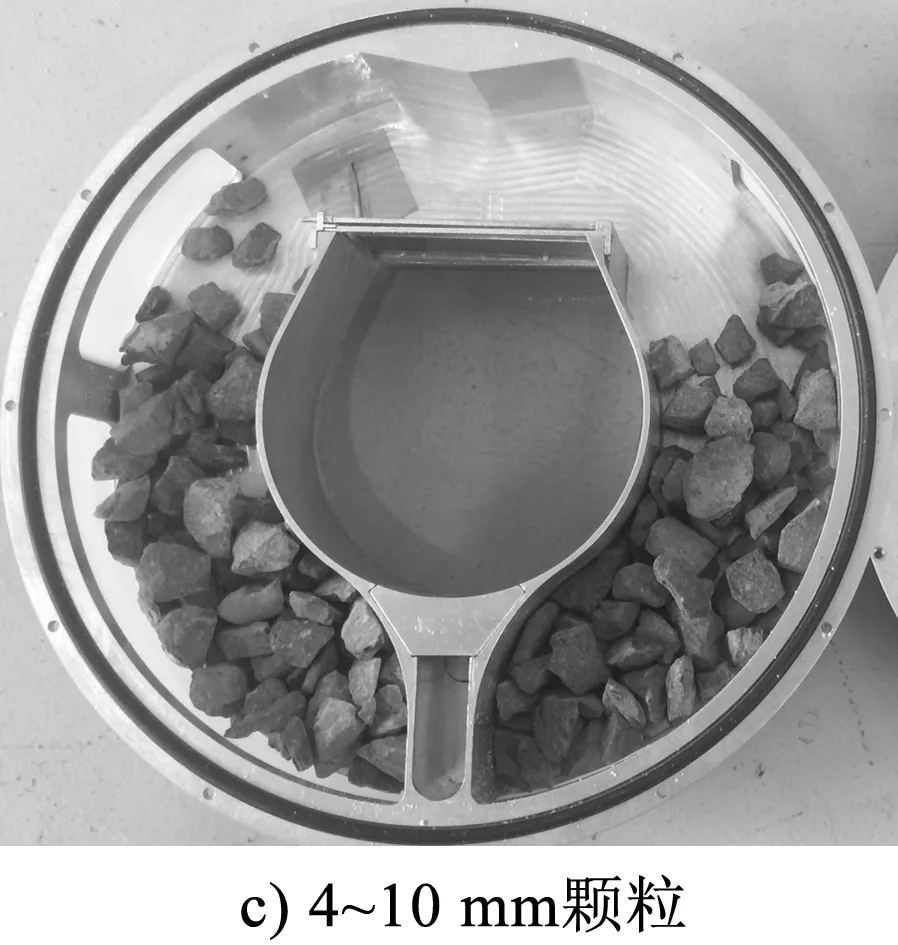
图9 不同颗粒采样测试结果
从测试结果可以看出,1~2 mm颗粒玄武岩和4~10 mm颗粒玄武岩均能完成部分样品收集;对于微重力颗粒,其采样率较高,可达90%以上,同时也验证了仿真方法的合理性。
4 结语
气体激励采样器利用全新的采样机理,具有轻质小巧、能耗低、反作用力小和采样简单可靠等诸多优势,摆脱了太空环境、探测器工作平台承载力等约束条件对采样设备带来的种种限制,是一种可适应未来小行星采样探测的新技术和新方法。
猜你喜欢
科学大众(2022年23期)2023-01-30
地下水(2022年1期)2023-01-11
军事文摘(2022年24期)2023-01-05
今日农业(2022年2期)2022-11-16
中华养生保健(2020年10期)2021-01-18
商品与质量(2020年21期)2020-11-26
中国化工贸易·上旬刊(2020年1期)2020-09-10
商品与质量(2020年10期)2020-07-10
科普童话·神秘大侦探(2020年3期)2020-05-11
太空探索(2016年1期)2016-07-12
