
深海超短基线定位系统现状及展望
2018-10-23 05:37张同伟王向鑫唐嘉陵秦升杰
舰船电子工程 2018年10期
张同伟 王向鑫 唐嘉陵 秦升杰
(1.国家深海基地管理中心 青岛 266237)
(2.青岛海洋科学与技术国家实验室海洋地质过程与环境功能实验室 青岛 266061)
(3.青岛海洋科学与技术国家实验室海洋观测与探测联合实验室 青岛 266237)
1 引言
潜水器是进入深海进行科学研究和调查作业必不可少的运载作业装备[1~4]。利用各类潜水器开展深海资源调查和科学研究不能忽略的一个重要问题是潜水器的水下定位问题,而海洋的介质环境决定了声比光和电磁波更适合作为水下定位技术的传播载体。
根据接收基阵基线长度来分类,水下声学定位技术可以分为长基线定位系统、短基线定位系统和超短基线定位系统三种[5~6]。超短基线定位系统[7~8]通过全球卫星定位系统、姿态传感器将船载声学换能器阵测得的相对位置转换到地球大地坐标系,以获得潜水器的大地经纬度坐标。超短基线定位系统具有构成简单、操作方便、便于大范围机动作业等优点,可为水下目标定位跟踪、水下遥控作业等各种高精度作业提供技术支持,使得它在海洋资源调查和科学研究领域发挥着越来越重要的作用。
本文首先介绍了超短基线定位的基本原理,然后系统介绍了法国iXblue、挪威Kongsberg、英国Sonardyne、美国LinkQuest和德国Evologics等公司的6款典型深海远程超短基线定位系统,并以哈尔滨工程大学远程超短基线定位系统为例分析了国内发展情况,最后展望了深海远程超短基线定位系统的发展趋势。
2 超短基线定位系统
2.1 基本原理
根据工作频率和作用距离的不同,超短基线定位系统的基阵长度一般在几厘米到几十厘米不等。超短基线定位系统有两种工作方式:一种是声学应答模式,水面分别向各应答器发送询问信号,各应答器接收到针对自己的询问信号后发送应答信号,通过计算发出询问信号到收到应答信号的时间差来计算距离。另一种是同步时钟触发模式,如果有缆则触发脉冲通过电缆触发应答器,如果无缆则需要采用高精度的同步时钟来同步触发应答器和水面系统,通过计算同步脉冲触发时刻到收到应答信号的时间差计算距离。
由时间差计算距离需要知道声速,因此精确的声速剖面数据是定位精度的保证。因此每到一个新的作业地点,必须测量声速剖面并输入到定位系统中。如果出现剧烈的气象过程(如大风、大雨),则需要重新测量声速剖面并更新到定位系统中。要确定潜水器在水下的位置,除了测量距离外还必须测量出方向角和倾斜角。超短基线定位系统是通过分析船载声学换能器阵接收信号的相位差来计算出方向角和倾斜角的。将水面船载GPS与超短基线定位系统相结合,能够准确判断水下应答器的精确位置。
2.2 系统组成
超短基线定位系统由水面船用设备和潜水器应答器组成。水面船用设备包括信号处理单元、船载声学换能器阵和外围辅助传感器(如GPS和姿态传感器)。船载声学换能器阵安装在船舶底部或侧舷,由中心的发射换能器和四周的多个水听器组成。水下部分主要是指应答器,如果工作在同步时钟触发模式,还需包括同步时钟。通常,超短基线应答器安装在水下载体的背部,其半球形指向性可覆盖整个上半空间,保证在水下各种深度和倾角状态下超短基线定位系统都能够正常工作。
2.3 工作频段
超短基线定位系统工作频段的选择取决于两点:定位精度和最大作用距离[9]。表1给出了工作频段和最大作用距离的对应关系。
深海远程超短基线定位系统通常选择低频或中频段,而对于全海深超短基线定位系统一般选择低频(8kHz~16kHz),或者更低频段。
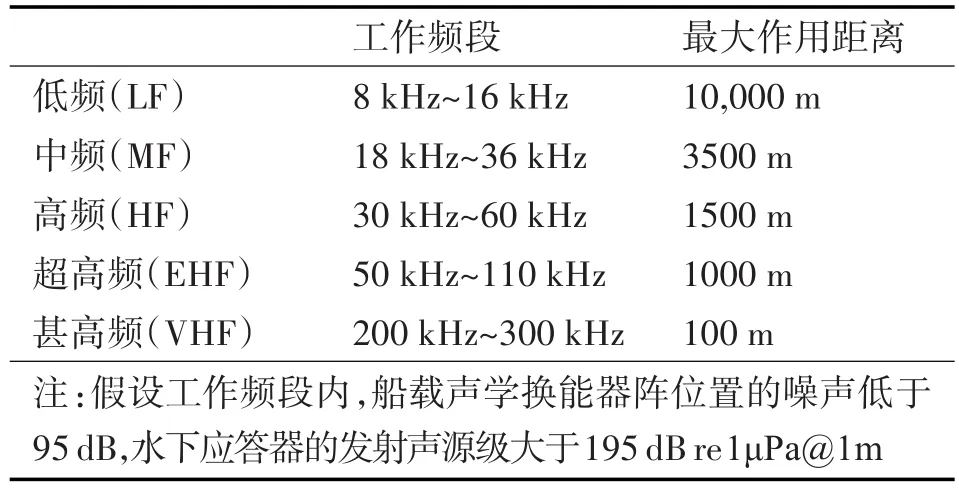
表1 工作频段和最大作用距离的对应关系
3 深海远程超短基线定位系统发展现状
目前国外超短基线定位技术比较成熟,已经实现超短基线定位系统的产品化、产业化、系列化。国际上主要的超短基线定位系统生产厂商主要有:法国 iXblue、挪威 Kongsberg、英国 Sonardyne、美国LinkQuest、德国Evologics等几家公司。表2给出了国外典型远程超短基线定位系统对比。
3.1 法国iXblue公司的POSIDONIA II
法国iXblue公司于2000年开始研制新一代远程超短基线定位系统,并于2010年完成产品定型,命名为 POSIDONIA II[10](见图 1)。POSIDONIA II的最大定位深度可达7000 m,最远定位斜距可达8000 m~10000 m。得益于iXblue公司强大的技术基础和完整的研发团队,POSIDONIA II最大的特点是组合兼容性强,数据融合技术独特。当它与该公司的其他导航设备,如OCTANS运动传感器、PHINS惯导联合使用时,性能可达到最优。此外,POSIDONIA II可与RAMSES 6000长基线和PHINS惯导构成一套完整的模块化水下导航系统,提供稳健、高更新率的定位信息。
根据船底安装方式的不同,POSIDONIA II的声学换能器阵可分为两种,一种是可垂直收放型,通过垂直升降机构可以将换能器阵下放至船底1.5 m,进一步避开船舶噪声的干扰,其换能器尺寸和重量较小;另一种是平齐安装型,声学换能器阵与船底固定在一起,换能器尺寸和重量较大,相应的发射声源级更高。
由于POSIDONIA II换能器阵和姿态传感器的分离式安装,两者之间不可避免地存在安装偏差,其海上标定采用8字形方案。海上标定通常选择在深度为1000 m左右海域进行,首先将3×3的标定矩阵初始化,完成8字形测量后,通过标定软件USBLCal可以计算生成标定后的3×3标定矩阵。在理想情况下(主要是指:GPS误差小于0.1 m;声速得到有效补偿;声学换能器阵位置噪声低于60 dB;应答器发射声源级达到191 dB ref@1 m),经过完好标定的POSIDONIA II定位精度可达0.2%斜距(60°圆锥角内)。
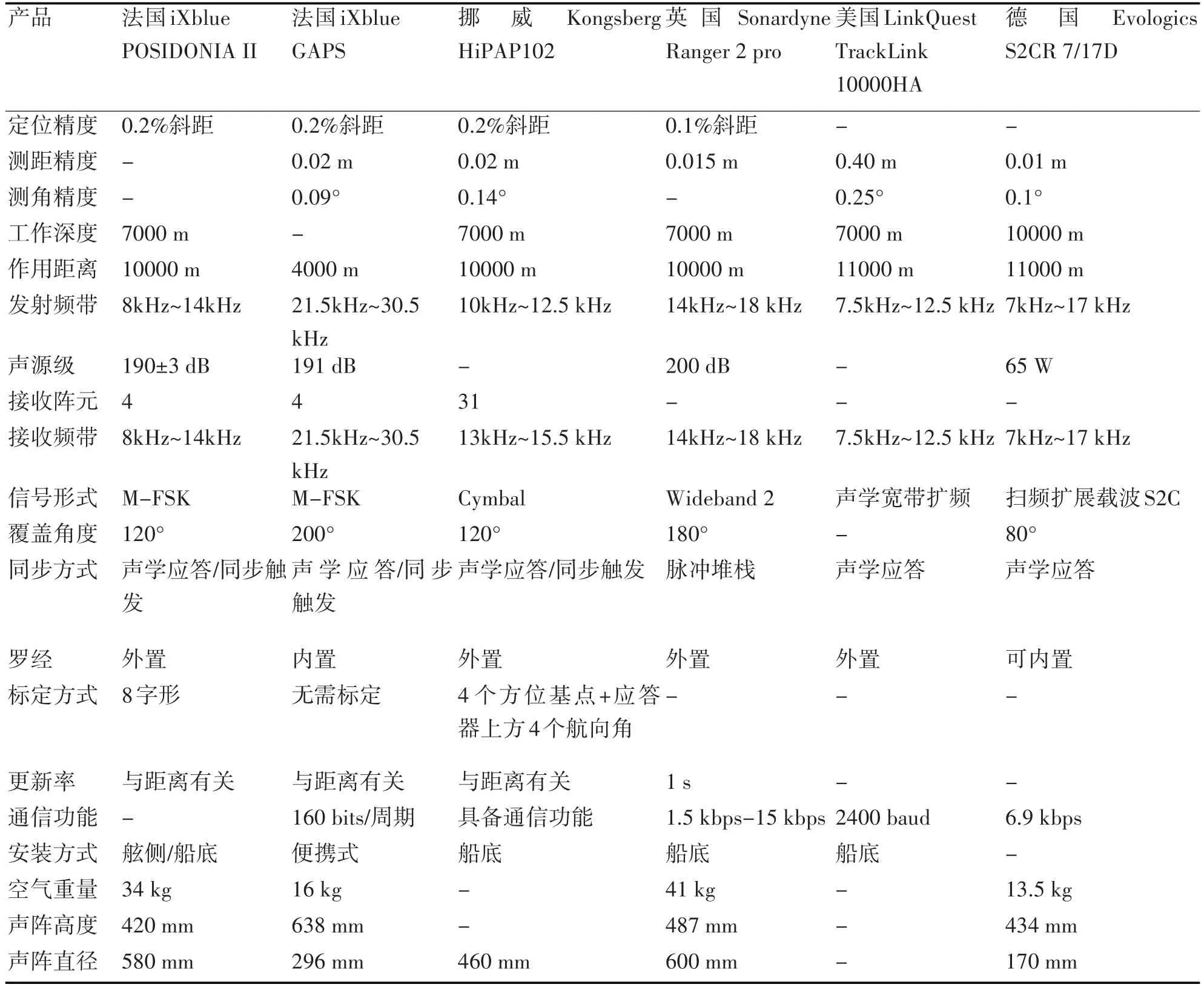
表2 典型远程超短基线定位系统对比[10~14]
3.2 法国iXblue公司的GAPS
为了避免繁重的海上标定试验,法国iXblue公司率先将姿态传感器(光纤罗经)与超短基线声学换能器阵固化在一起,实现一体化安装,开发了世界上首款便携式、即插即用、免标定的超短基线定位系统,并命名为 GAPS[10](见图2)。GAPS各传感器的安装误差/相对偏移量在出厂前已进行实验室预先标定,并固化在系统的内部程序中,因此系统在海上作业现场无需标定,不存在各传感器之间的安装、测量误差问题,确保了系统的高精度定位。GAPS的工作频段为21.5 kHz~30.5 kHz,作用距离可达4000 m,定位精度可达0.2%斜距。
GAPS换能器阵进行了独特的3维设计,覆盖角达到惊人的200°,使得它可以追踪从深海到浅水的目标,甚至可以对水平面以上的目标进行定位。此外,GAPS还增加了水声通信功能,每个周期内数据速率为160 bit,能够传输一些简单的指令或数据。
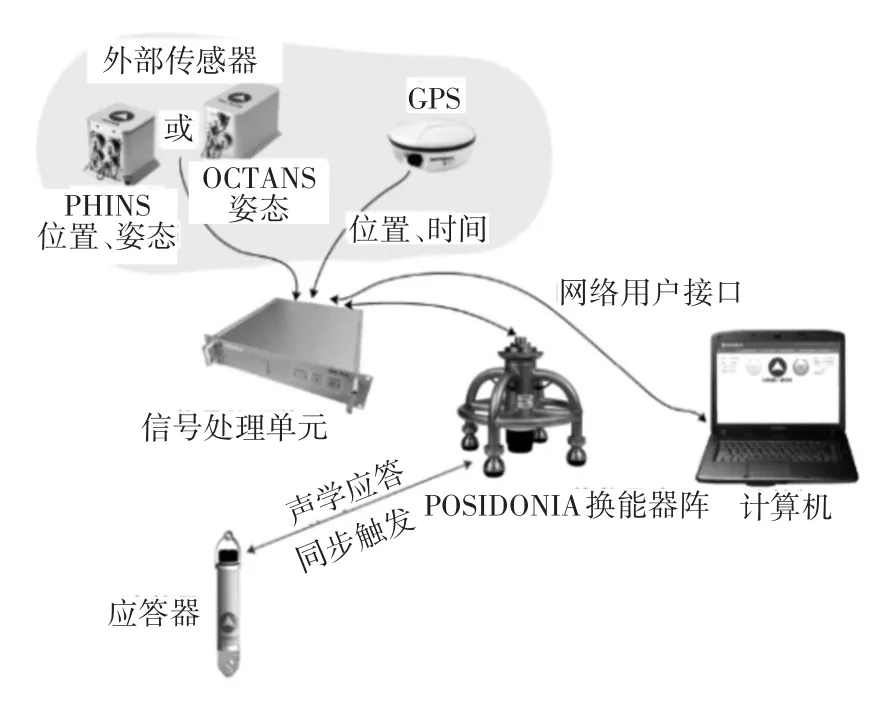
图1 法国iXblue公司的POSIDONIA II

图2 法国iXblue公司的GAPS
由于换能器阵与姿态传感器固化在一起,因此无论GAPS的换能器姿态如何,系统均能获得高精度的水下目标位置。这也使得GAPS的安装非常简单,既可以通过绳索悬吊在水中,也可以采用法兰盘刚性安装在船舷。
3.3 挪威Kongsberg公司的HiPAP102
为满足浅水和深水水下目标定位的不同需求,挪威Kongsberg公司是开发了HiPAP系列超短基线定位系统。HiPAP502/452/352/102型属于第三代HiPAP系列产品[11],采用了全新的收发单元和Cymbal技术。Cymbal是一种用于通信和定位的全新声学协议,它采用基于相移键控的直序扩频技术,可以有效抑制多途干扰,使得定位过程中的角度估计精度提高30%。
所有的HiPAP系列超短基线定位系统都拥有相同的软件和硬件平台,而且具有长基线定位功能。其中,HiPAP102(见图3)的工作频带为10 kHz~15.5 kHz,在HiPAP系列家族中属于低频成员,作用距离可达10000 m,定位精度可达0.2%斜距。HiPAP102采用31阵元的平面阵列,覆盖范围为±60◦。它可以通过定位-跟踪算法给出预估方向(即获得先验信息),并结合姿态传感器提供的姿态信息,构建动态波束成形技术,可有效提高水平和垂直角度估计能力。特殊的换能器技术和先进的数字信号处理技术使得HiPAP102具有精度高、重复性好、可靠性高等特点。
HiPAP102的声学换能器阵采用船底安装方式,通过垂直升降机构可以将换能器阵下放至船底2.0m,进一步避开船舶噪声的干扰。由于HiPAP102换能器阵和姿态传感器的分离式安装,两者之间不可避免地存在安装偏差,其海上标定采用4个方位基点和应答器上方4个航向角的方案,通过APOS模拟器中的标定模块,可以计算标定系数,完成海上标定工作。

图3 挪威Kongsberg公司的HiPAP102
3.4 英国Sonardyne公司的Ranger 2
英国Sonardyne公司在2005年成功推出了基于宽带数字技术的WideBand全系列超短基线产品,2010年又推出了第二代宽带数字技术的6G全新超短基线产品[12]。在独立通道资源、测距精度、多途干扰抑制、提高信噪比以及高速数字通信等方面都取得了很大的提高。其数字通信速率达到1.5kbps~15kbps,真正实现了声学定位和高速数字通信的无缝衔接。Ranger 2(见图4)的工作频带为14kHz~18kHz,作用距离可达10000 m,定位精度可达0.1%斜距。
Ranger 2集成了Sonardyne公司最初针对深水钻井应用开发的、独创的多脉冲堆栈技术。该技术使得Ranger 2可以在上一个应答信号接收前,向应答器发射多个询问脉冲。通过多脉冲堆栈技术,Ranger 2可以在任何水深环境下获得高达1s的数据更新率。
Ranger 2的声学换能器阵采用船底安装方式,通过垂直升降机构可以将换能器阵下放至船底3.7 m,进一步避开船舶噪声的干扰。由于Ranger 2换能器阵和姿态传感器的分离式安装,两者之间不可避免地存在安装偏差,其海上标定围绕应答器或在固定偏移点操纵船只,采集海底应答器距离和船只DGPS位置。Sonardyne公司开发的CASIUS标定软件使用一个海底应答器的距离和船只DGPS位置,通过最小二乘法调整来确定应答器的东、北和深度,用来优化Pitch、Roll和Heading改正值,完成海上标定工作。
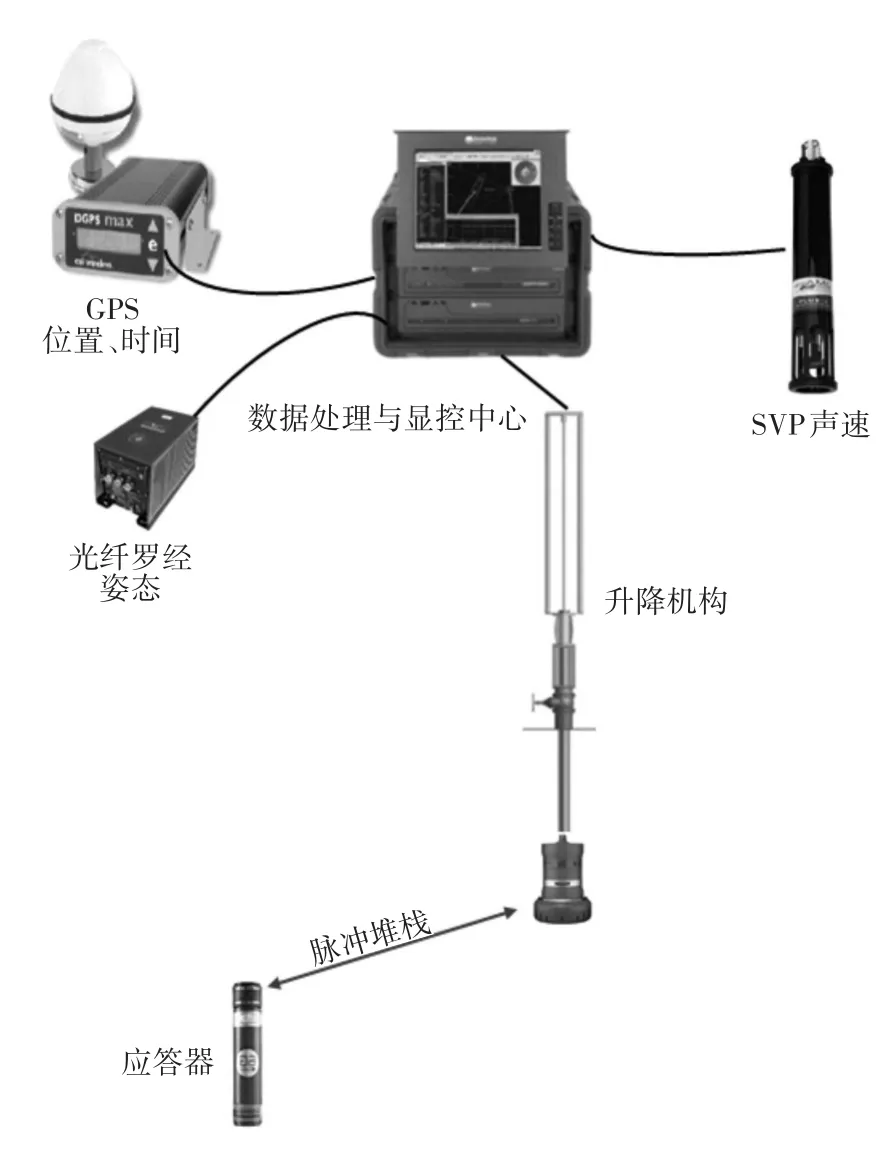
图4 英国Sonardyne公司的Ranger 2
3.5 美国LinkQuest公司的TrackLink 10000
美国LinkQuest公司自2002年推出其首款浅水超短基线定位系统TrackLink 1500以来,迅速成为最畅销的超短基线定位系统。近年来开发的TrackLink 10000系列产品属于低频远程超短基线定位系统。基于其独特的声学宽带扩频技术(BASS),LinkQuest为用户提供超远程深水通信和跟踪定位解决方案。
TrackLink 10000HA是TrackLink 10000系列中的高精度型号[13],其工作频带为7.5kHz~12.5kHz,作用距离可达11000 m,角度估计精度为0.25°,测距精度为0.4 m,数字通信速率达到2400 baud。其主要特点包括:得益于现代数字信号处理技术和最新DSP处理器的广泛应用,大大降低了用户费用,其价格较同类产品至少降低40%以上。
3.6 德国Evologics公司的S2CR 7/17D
德国Evologics公司S2CR系列超短基线定位系统是在该公司S2CR型水声通信机基础上研发的超短基线定位系统。它无需进行定位和通讯模式转换,定位数据在声学传输时同时进行计算。这两种功能在一个完全集成的定位和通讯系统中相互补充,开创了新的广泛海底应用的可能性。
S2CR 7/17D型是S2CR系列中的低频远程成员[14],其工作频带为 7kHz~17kHz,作用距离可达11000 m,角度估计精度为0.1°,测距精度为0.01 m。Evologics公司基于仿生学研究的扩频技术开发了S2C扫描扩频载波专利技术,实现了水下全双工数字水声通信。在低频段,S2CR 7/17D的数字通信速率达到了6.9 kbps。此外,S2CR 7/17D系统的耐压壳体内还可以加装运动传感器,从而提供母船的纵横摇和艏摇的数据。
3.7 国内发展现状
自2001年起,在国家863计划持续支持下,哈尔滨工程大学研制成功了远程超短基线定位系统,打破了国外技术长期垄断的格局。该系统自2012年起正式装备于我国系列远洋科考船上,如大洋一号、科学号、向阳红09和探索一号等,并已经执行了多次科考任务。
4 深海远程超短基线发展趋势
通过对国内外典型远程超短基线定位系统的比较分析,以及参考其他一些系统,可以得出深海远程超短基线定位系统的发展趋势。
4.1 超短基线与长基线相结合
超短基线定位系统的缺点是定位精度与距离/深度有关。在深海作业支持领域,一些作业需要更精确的定位,这就需要长基线定位系统。长基线定位系统的优点是定位精度高,且与深度无关,缺点是需要投放信标阵列,设备和时间成本高。如果将长基线定系统与超短基线定位系统相结合,研发长/超短基线组合定位系统,既可以保证定位精度独立于工作水深,又兼具超短基线机动灵活的特点,实现对水下载体的连续高精度导航定位。在这方面,英国Sonardyne公司是先行者,它们已推出LUSBL组合定位系统。
4.2 超短基线与姿态传感器一体化
超短基线各测量设备的分离式安装导致船载声学换能器阵与外围辅助传感器之间不可避免地存在安装偏差。虽然通过海上标定试验可以对偏差进行有效校正,但是随着时间的推移,又会引入新的偏差,导致定位性能下降。而每次校正都需要选择合适的海域,并耗费大量的时间、人力、物力。如果将姿态传感器与声学换能器阵一体化安装,在实验室完成标定,开发便携式、即插即用、免标定的超短基线定位系统无疑是未来的发展趋势。在这方面,法国iXblue公司是先行者,它们推出的GAPS超短基线定位系统受到广泛欢迎。
4.3 超短基线与高速数字水声通信相结合
超短基线定位系统可以实现水下目标定位跟踪;数字水声通信则是水下无线信息获取、传输和控制的首要技术手段。大多数海洋调查装备都需要数字水声通信进行数据传输,或者指令交互。如果能够将超短基线和高速数字水声通信相结合,在超短基线上增加通信功能,或者在数字通信系统上增加定位功能,开发无需定位和通信模式转换的水下综合通信定位系统,实现定位数据在声学通信传输时同步解算。在这方面,德国Evologics公司和英国Sonardyne公司是先行者,它们推出的超短基线定位系统都具备高速数字水声通信功能。
4.4 更高的定位数据更新率
当采用声学应答模式,超短基线通常是在收到上一个应答信号后,才能进行下一次询问。当采用同步触发模式,只需要单程声传播,数据更新率可以提高一倍。但是,在深海综合应用中,无论哪种工作模式,其定位数据更新率都比较低。如果对定位脉冲进行编码,超短基线定位系统能够对收到的应答信号进行正确解码,并确定其对应的定位轮次,则可以在上一个应答信号接收前,连续向应答器发射多个询问脉冲,则可以大大提高超短基线定位系统的定位数据更新率。在这方面,英国Sonardyne公司是先行者,它们推出的超短基线在任何水深环境下都可获得高达1s的数据更新率。
5 结语
随着深海开发技术的不断完善,人们所采用的研究手段也越来越多,如载人潜水器、ROV、AUV、水下滑翔机、深拖系统、电视抓斗以及其他探测设备。水声定位技术中的超短基线具有其他导航定位系统所不具备的优势,它能够为各类探测装备直接提供绝对位置信息,成为深海探测中必不可少的一种定位手段。
虽然世界上有多家公司和科研院所可以提供成熟的系列化超短基线定位系统,但是随着科学与技术的不断进步,人类对深海水下定位技术也提出了越来越高的要求。通过对国内外典型深海远程超短基线定位系统的比较分析,并结合深海调查的实际需求,可以得出深海远程超短基线定位系统的发展趋势是:1)超短基线与长基线相结合;2)超短基线与姿态传感器一体化;3)超短基线与高速数字水声通信相结合;4)更高的定位数据更新率。
猜你喜欢
导航定位学报(2022年3期)2022-06-10
广东教学报·教育综合(2022年45期)2022-05-05
无损检测(2022年1期)2022-03-16
铁路通信信号工程技术(2021年12期)2021-12-31
煤气与热力(2021年5期)2021-07-22
家庭影院技术(2020年11期)2020-12-28
家庭影院技术(2020年5期)2020-08-24
家庭影院技术(2020年6期)2020-07-27
水下无人系统学报(2020年1期)2020-03-06
智富时代(2019年7期)2019-08-16
