
舰载巡航导弹远程对陆打击工作模式研究
2018-10-23 05:37陈辞
舰船电子工程 2018年10期
陈 辞
(海军驻426厂军代室 大连 116005)
1 引言
现代战争越来越重视从海上对敌方纵深领土进行打击,使敌方陆上主要军事设施陷于瘫痪,同时将己方损失减至最小[1]。在水面舰艇平台上装备制导精度高、射程远的巡航导弹等远程打击武器将使其作战范围扩大到陆地远程军事目标,能够以最低的消耗对敌目标实施“外科手术”式的打击,减少己方人员损失和降低冲突升级的风险。例如美国海军在海湾战争、伊拉克战争中多次使用宙斯盾驱逐舰发射战斧巡航导弹,有效打击了敌方的战略和战术远程目标[2]。
在水面舰艇发射平台上使用巡航导弹武器对敌远程陆上目标执行精确打击任务时,根据巡航导弹武器自身的技术水平和操控能力,其工作模式主要可分为2种[3]:基于“发射后不管”的开环工作模式、基于“人在回路控制”的闭环工作模式。其中,基于“发射后不管”的巡航导弹开环工作模式,具有武器操控功能单一、任务规划简单、真正做到发射后不管的无人职守等技术特点,非常适合用来打击敌方陆上长期存在且不发生变化的固定目标。而基于“人在回路控制”的巡航导弹闭环工作模式,在武器发射后需要根据战场目标态势的动态变化、上级指挥机构的任务变更指令,对巡航导弹进行实时操作与控制,能够用来打击敌方陆上的机动目标、稍纵即逝的临时目标[4]。这种模式一方面极大地提高了远程精确打击任务执行的灵活性,另一方面无疑也使得前期的任务规划更加复杂、后期对武器实时操控的技术要求更高。
2 基于“发射后不管”的开环工作模式
在基于“发射后不管”的开环工作模式下,巡航导弹通常只需要在发射前对其做好任务规划[5]工作,包括规划好飞行航路、装载制导数据和目标特征信息等,在巡航导弹发射后操作员可以做到放任不管,不再对其实施控制,只需通过导弹飞行中的位置上报系统来接收信息。巡航导弹则按照预先规划好的航路飞行,抵达目标区域后自动搜索目标并予以攻击。
2.1 工作原理
基于发射后不管的巡航导弹开环工作模式,其原理示意图如图1所示。

图1 基于发射后不管的巡航导弹开环工作模式原理图
巡航导弹预先任务规划,主要完成巡航导弹飞行航路的规划与设计、弹载信息装订等工作。在巡航导弹发射后,任务监控管理主要负责对巡航导弹执行远程打击任务的全过程进行实时任务监控与管理,巡航导弹武器自身的弹载制导系统,与巡航导弹武器控制系统一起完成对巡航导弹的内环制导与控制。
2.2 固定目标打击流程
基于发射后不管的巡航导弹开环工作模式,其针对敌方陆上固定目标的典型打击流程示意图如图2所示。

图2 基于发射后不管的巡航导弹打击固定目标流程示意图
假如要打击敌方岸基指挥所目标,至少需要2枚以上巡航导弹,分别从目标正前方和侧面同时予以打击。那么图中编号为#1的巡航导弹可先从水面舰艇平台上发射,并沿着第1条飞行航路琼海和贴地低空飞行,待飞抵目标区域后按照预定入射角从侧面对目标实施打击。同时,编号为#2的第2枚巡航导弹从水面舰艇或潜艇平台上发射(图中是从潜艇平台上发射,且飞行航路更短),沿着第2条飞行航路飞抵目标区域,并按照预定入射角从目标正前方对目标实施打击。巡航导弹在飞行过程中,利用卫星导航系统实现精确导航定位[6],同时借助通信卫星向发射平台报告其位置信息。此外,如果采用地形匹配制导技术,巡航导弹在陆地上空飞行时,地形匹配辅助制导系统将巡航导弹飞经地区的地形与储存的参考地形进行比较,使巡航导弹保持在正确的航线上。
3 基于“人在回路控制”的闭环工作模式
3.1 工作原理
基于人在回路控制的巡航导弹闭环工作模式,其原理示意图如图3所示。

图3 基于人在回路控制的巡航导弹闭环工作模式原理图
与前述基于发射后不管的巡航导弹开环工作模式的原理图中一样:巡航导弹预先任务规划,主要完成巡航导弹飞行航路的规划与设计、弹载信息装订等工作;任务监控管理,主要负责对巡航导弹执行远程打击任务的全过程进行实时任务监控与管理,必要情况下可对巡航导弹发送预先装订的武器控制指令;巡航导弹武器自身的弹载制导系统,与巡航导弹武器控制系统一起完成对巡航导弹的内环制导与控制。
闭环与开环的不同之处在于:巡航导弹发射后,指挥官能够根据战场态势、作战意图的变化,利用卫星通信等数据传输技术手段对巡航导弹武器实施灵活指挥与控制。例如导弹操控者可在航改变打击目标,对当前打击任务进行在航重规划,并实时将重规划好的任务数据和指令发送给巡航导弹武器,巡航导弹接收到重规划指令和任务数据后,自动装订新的任务数据并更新打击目标和飞行航路,完成对目标的打击。
总的来说,基于人在回路控制的巡航导弹工作模式,其基本原理是基于一种闭环武器控制的方法,来实现对巡航导弹武器的发射与在航控制。采用这种工作模式的巡航导弹的典型代表,就是美国海军的“战术战斧”Block-4多任务巡航导弹[7]。
3.2 主从目标打击流程
基于人在回路控制的巡航导弹闭环工作模式,其针对敌方陆上主从目标的打击流程示意图如图4所示。
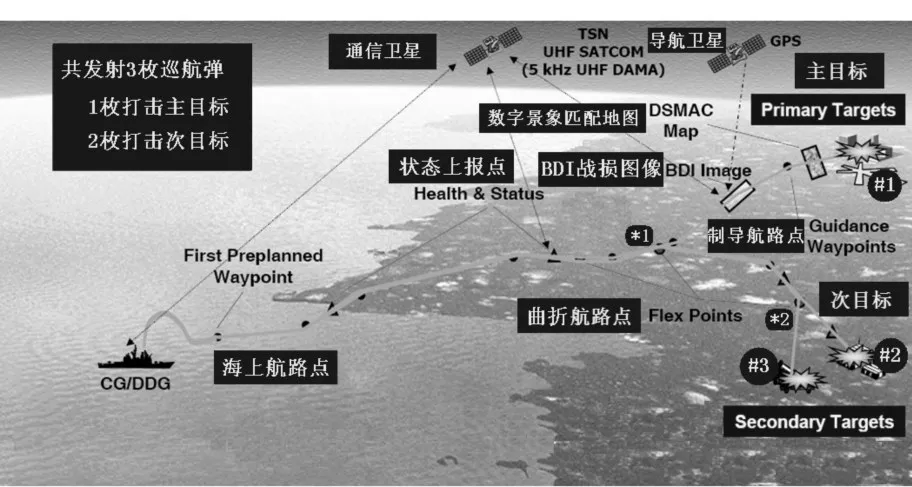
图4 基于人在回路控制的巡航导弹打击主从目标流程图
图中所示为美国海军的“战术战斧”Block-4多任务巡航导弹的打击主从目标典型流程[8]。在靠近敌方海湾的近海区域,从美海军“阿利伯克”级导弹驱逐舰上先后共发射了3枚巡航导弹,其打击目标的信息装订遵循以下规则:
1)3枚巡航导弹的首选打击目标都是主目标(如图中所示,主目标为指挥中心,Primary Targets);
2)第1枚巡航导弹(如图中右上角所示,打击指挥中心的、编号#1的那枚巡航导弹)只打击指挥中心主目标,不设备选目标,因此只装订指挥中心的主目标信息;
3)第2枚巡航导弹、第3枚巡航导弹在预先任务规划时,除了装订主目标信息之外,还可以分别装订另外2个次目标(Secondary Targets)信息,作为备选的打击目标;
4)第2枚巡航导弹(如图中右下角所示,打击兵力集结阵地的、编号#2的那枚巡航导弹)可以同时装订指挥中心主目标、兵力集结阵地次目标共2个目标的信息,并且打击目标的优先顺序为“指挥中心”主目标→“兵力集结阵地”次目标;
5)第3枚巡航导弹(如图中右下角所示,打击武器弹药库的、编号为#3的那枚巡航导弹)可以同时装订指挥中心主目标、武器弹药库次目标共2个目标的信息,并且打击目标的优先顺序为“指挥中心”主目标→“武器弹药库”次目标。
上述3枚巡航导弹从CG/DDG平台上发射升空后,都是经过最初的抛物线弹道运动后下降到指定的高度上作琼海飞行,顺利到达第1个海上航路点(图中所示的First Preplanned Waypoint黑色圆点)。之后这3枚巡航导弹均按照预先规划好的航路“沿线”作琼海和贴地飞行,并依次一一途经航路前段部分的所有海上和陆上航路点。巡航导弹在到达飞行航路上的状态上报点(如图中所示的黑色三角形)时将通过战术打击网TSN中的UHF卫星通信网向武器发射平台上报巡航导弹自身的健康状态信息,并在飞行过程中通过UHF通信卫星接收广播的BDI战损图像[9]。
正常情况下,当这3枚巡航导弹越过最后一个制导航路点(Guidance Waypoints)之后,利用弹上预先装订好的末制导数字景象匹配DSMAC地图,完成精确的数字景象匹配末制导,待识别出主目标后立即调整飞行姿态并冲向目标予以摧毁。
当这3枚巡航导弹到达第1个曲折航路点(如图中所示的,编号*1的红色圆点,Flex Points)时,此时远程打击作战指挥官需要根据战场态势、巡航导弹健康状态、上级作战指令等多种条件对这些巡航导弹进行基于人在回路的指挥与控制。
需要说明的是,主目标就是巡航导弹默认打击的目标,次目标就是巡航导弹不打击主目标时所更改的备选打击目标。对于次目标来说,既可以在预先规划阶段就将其装订到巡航导弹中,也可以在巡航导弹飞行阶段进行实时目标在航装订[10]。
4 模拟软件仿真设计
在上述舰载巡航导弹远程对陆打击理论分析的基础上,从工程实践的角度,对远程对陆打击任务规划模拟软件[11]——RPLSIPS进行了仿真设计。RPLSIPS模拟仿真软件的功能组成设计如图5所示。

图5 RPLSIPS模拟仿真软件的功能组成
1)打击目标优先级计算子功能,负责计算每个被打击目标的优先级,通过算法中定义的优先级评价函数来计算目标优先级。
2)多目标优先级综合排序子功能,负责将计算所得的所有目标优先级进行综合排序,以便遵照目标优先级先后顺序进行后续任务规划。
3)导弹-目标匹配度计算子功能,负责计算每个打击目标与不同导弹型号之间的匹配度,进而为每个打击目标选取匹配度最高的导弹型号作为其远程打击武器。
4)导弹-目标分配全局优化子功能,负责在当前可用型号导弹和所有打击目标之间进行全局弹目分配,以达到最优化弹目分配效果。
5)战术规划打击方案生成子功能,负责为每个打击目标制定符合其打击时间要求的战术打击方案,并生成综合的战术规划打击方案。
RPLSIPS模拟仿真软件的主界面及其各个主要功能界面,设计如图6所示。

图6 RPLSIPS软件的功能界面设计
RPLSIPS模拟仿真软件的操作试验流程,设计如图7所示。

图7 RPLSIPS软件的操作试验流程设计
RPLSIPS模拟仿真软件的操作试验步骤说明如下:
第1步:启动运行远程对陆打击任务规划技术验证仿真软件,配置系统环境变量。
第2步:设定本次技术验证的试验参数,包括试验内容、试验场景和试验流程的类型。
第3步:根据上一步设置好的试验参数,创建打击目标、武器状态、气象地形等各类远程对陆打击任务规划支撑数据库,初始化相应的数据库存储数据。
第4步:接收主界面数据窗口输入的远程打击任务数据包。
第5步:从远程打击任务数据包中解析、提取出目标名称、打击时间等目标基本信息。
第6步:以该目标基本信息为检索条件,从相关数据库中检索出该目标详细信息,经数据组织后生成用于任务规划的任务目标数据。
第7步:计算每个目标初始优先级。
第8步:对所有目标按照优先级高低进行排序。
第9步:分别计算出与各个目标匹配度最高的导弹型号。
第10步:对所有目标在全局范围内进行弹目分配。
第11步:将弹目分配结果与外部输入的航路规划结果进行综合,生成战术任务规划打击方案。
第12步:通过人机交互主界面上的推演显示窗口对方案执行过程进行监控。
第13步:在人机交互主界面上的评估结果显示窗口上显示效能评估结果。
5 结语
本文首先介绍了舰载巡航导弹对敌实施远程对陆精确打击的概念和作战背景,然后详细分析了舰载巡航导弹远程对陆打击的开环、闭环等不同工作模式的工作原理,以及在不同工作模式下各种目标的典型打击流程,最后从工程实践的角度对远程打击任务规划模拟软件的功能组成、操作界面以及试验流程进行了仿真设计。本文的研究能够为实现舰载巡航导弹对陆远程打击提供一定的技术参考。
猜你喜欢
环球时报(2022-08-18)2022-08-18
电气电子教学学报(2022年3期)2022-07-30
军民两用技术与产品(2021年9期)2021-11-27
小猕猴智力画刊(2021年2期)2021-02-22
新课程·上旬(2020年3期)2020-08-07
火力与指挥控制(2020年2期)2020-04-02
导航定位与授时(2020年1期)2020-02-18
军事文摘(2020年24期)2020-02-06
电子技术与软件工程(2020年7期)2020-02-05
弹道学报(2019年4期)2020-01-10
