
无人机及其自动控制原理概述
2018-10-21 17:37任力诺
科技传播 2018年19期
任力诺
摘 要 无人机的发展已经有了几十年的历史,随着近几年来的科技发展,无人机技术日渐成熟,也更加受到了人们的重视,无论在军事上还是民用领域中都得到了广泛的应用。目前最常见的是四旋翼无人机,它结构简单,使用方便,通过对四个旋翼转速的调节,就可以实现平动、垂直起降以及俯仰、滚转、偏航等复杂的运动形式,通过自身的导航系统保证飞行路径的可控性,可借助通讯系统与地面控制人员进行交互以实时监测无人机的飞行状态。无人机的控制策略有很多,使用最广泛的仍然是PID控制策略,虽然比较简单,但基本能够胜任常规的工作。相信随着无人机技术的进步,其应用领域会更加宽广。
关键词 无人机;飞行器控制;PID控制
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2018)220-0146-03
所谓无人机,就是一种不需要人在驾驶舱驾驶,可以利用无线通讯方式远程操纵或者通过设定好的控制器实现自动控制的无人飞行器。无人机其自身具有成本低,性价比高等优点,而且由于不需要人进行实地操纵,适用于在各种复杂而危险的环境中使用,因此一直得到全世界的重视。尤其是在当下,信息化和智能化蓬勃发展,无人机能够很好地和这些相关技术相结合,从而大大提高其效能。在国际竞争中,无人机技术的发达程度也成为了一项相当重要的衡量标准。举例来说,美国具有领先世界的捕食者、全球鹰等先进的无人机,遥遥领先于世界。我们可以看到,无人机在近年来的现代战争中已经广泛应用于实战,而且在民用领域也有很大的发展空间。
1 无人机的发展历程
不要以为无人机的发展是近一二十年来的事情,其实无人机出现得相当早,一开始的出现是出于军事上的考虑。早在二战时期,为了减少不必要的人员伤亡,无人机就肩负起靶机的使命,用于演习等训练场合[ 1 ]。无人机首次参与实战是在1982年以色列主导的加利利和平行动[2]中,这是无人机首次承担真正意义上的战斗任务。当然那个时候的无人机还不是作为战场上杀敌的武器,由于技术还不是那么先进,所以只是完成了一些侦查、跟踪、通讯等辅助工作,取得了很好的效果。在那个时候,大部分无人机其实和我们在超市里经常见到的遥控飞机比较类似,结构比较简单,因此功能也相对有限。但是从减少人员伤亡和在战场中更广泛地应用先进技术的趋势来看,无人机从那时起就得到了广泛的关注,各国军方开始考虑将一些已经退役或者淘汰下来的飞机改装成无人机用于实战以提高军事装备的使用效能。因此在20世纪末期的海湾战争和科索沃战争中得到了一定程度的應用。
正是从20世纪90年代开始,无人机的应用领域越来越宽广,得到了全世界更多地关注[3],随着新科技革命、互联网时代的到来,信息技术也逐渐应用到无人机上,从而拓宽了无人机的应用范围。从那时起,无人机的可靠性也大大提升,不只是受人远程遥控,也能够根据预先设定好的程序主动地执行一些简单的任务。这些都依赖于图像处理技术以及实时通讯技术的逐步完善和优化。当然,材料科学的发展对无人机的设计方面也起到了至关重要的作用,轻型材料不断出现有助于无人机的轻量化与小型化。机械设计的发展也带来了新翼型的出现,能够大大减小飞行时的阻力。有了这些新技术的助力,无人机的发展越来越迅猛。
时间进入21世纪,随着无人机自动化程度的不断提高,今天无人机在军事方面的应用也更加广泛,美国人制造的捕食者无人机[4]就用于精确打击恐怖分子,在自然灾害的救援上也得到了使用。而且随着科技的进步,成本的降低,无人机的门槛也越来越低,民用领域也逐渐火热起来,现在已经广泛用于摄像、演出等场合。不过由于空域受限,民用领域的发展也受到了一定的束缚。
经过了将近一个世纪的发展,无人机技术已经日臻成熟,之后的应用也会越来越多。
2 无人机的主要结构层次
2.1 无人机的系统结构
从系统组成来看,主要分为以下几部分:飞行控制系统、通讯系统、导航系统和无人机机械结构本体。有的时候还需要有地面基站[5],主要用于需要对无人机行为进行人为实时监测的场合中。
飞行控制系统与导航系统相配合,用于实现对飞行器的自动化控制。导航系统主要由各种传感器组成,用于监测无人机的方位信息,判断在目标路径中所处的位置,将信息反馈给飞行控制系统和实时监测人员。传感器括陀螺仪,GPS定位传感器等其他与所要实现功能相关的传感器。飞行控制系统根据导航系统所搜集到的信息对无人机的飞行姿态进行调整,从而按照事先所规划的路径进行移动,以及实现拍摄、编队、投递等其他功能。
地面基站用于对无人机采集到的各种信息进行进一步分析处理,对于飞行控制器无法实现的功能也可以借助通讯系统进行远程遥控指挥,同时也可以对控制器进行调整,从而提高飞行器的适应性。
无人机的机载通讯系统用于与地面基站的交互,以及与其他无人机保持联系,因此保持信道的稳定性相当重要。无人机的故障很多都是由于通讯系统失灵而导致的,即便是控制器失灵,仍然可以通过人工操作使其返航。而通讯系统失灵就相当于切断了无人机与外界的联系,不过如果自动控制功能足够强大的话,无人机仍有可能在通讯系统失灵的状态下完成承担的任务。
2.2 无人机的机械结构
不同无人机具有不同的机械结构,早期的无人机很多是由飞机加装飞行控制器直接改装而来,因此其气动结构与普通飞机基本相同,这里不做过多的讨论。目前市面上广泛应用的是四旋翼无人机,我们就以四旋翼无人机为例介绍无人机本体的结构特点及其飞行原理。
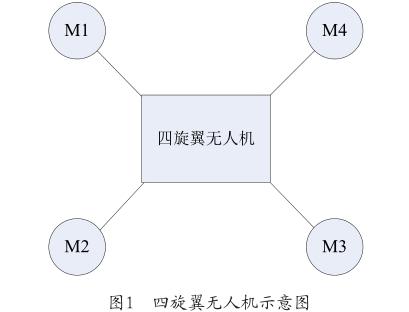
四旋翼无人机的简图如图1所示,主要由4个旋翼、悬架以及电子器件组成,电子器件和悬架位于无人机的中心位置,4个旋翼分列于四角,由电机带动叶片旋转,电机由控制器控制。通过改变无人机各旋翼的转速,可以调整无人机的运动状态,实现平动、垂直运动、俯仰、滚转、偏航等多种运动模态。电机的电能来源于安装于中心位置的电源,小型四旋翼无人机的续航能力往往在十几分钟或半个小时之间不等,而大型四旋翼无人机可以续航几个小时。悬架上往往放置有实现目标功能的设备,比如照相机、机械臂等。如何在不同的飞行状态下保持悬架的稳定性也是目前一个比较热门的课题。电子器件主要包括控制电路和传感器,基本都是以集成电路的形式,大大减小了所占空间,同时降低了无人机的负载质量。
下面我们结合示意图来讲解四旋翼无人机的飞行原理。考虑到质量分布情况,旋翼的质量很轻,主要的重量都集中在悬架上,因此可认为无人机的质心位于中心位置[6]。
由对称性可知,若想让无人机保持平衡,需要对角线上的两个旋翼转向保持一致,并与另一对角线上的旋翼转向相反,从而使两个方向的转向力矩相互抵消,这样就可以实现无人机在空中的悬停。如果仅要完成竖直方向上的运动,则在平衡的基础上调整旋翼的转速即可实现。当将四个旋翼的转速同时增大时,就可以提供更大的升力,推动无人机向上运动。反之,整体减小四个旋翼的转速就可以迫使无人机竖直向下运动。
对于俯仰运动,可以通过以下的方式:保持M1、M3的转速不变,减小M4的转速,提高M2的转速(或相反)。这样可以增加后部的升力降低前部的升力从而产生前后方向的翻转力矩,实现俯仰运动。类似地,保持M2、M4的转速不变,减小M1的转速,提高M3的转速(或相反),产生滚转力矩,实现滚转运动。
前述的俯仰和滚转运动是通过对角线分组来实现的,对于偏航运动,考虑到旋转轴的变化,应该将分组调整为M1、M2一组,M3、M4一组,同样保持組内速度协调一致,而产生组间的转速差,就可以产生偏航力矩。
当无人机进行转向运动时,往往需要这几个运动互相组合叠加,因此旋翼的工况会比较复杂,具体的转速大小及方向与实际需求相关,这里不再赘述了。
3 无人机的控制器设计
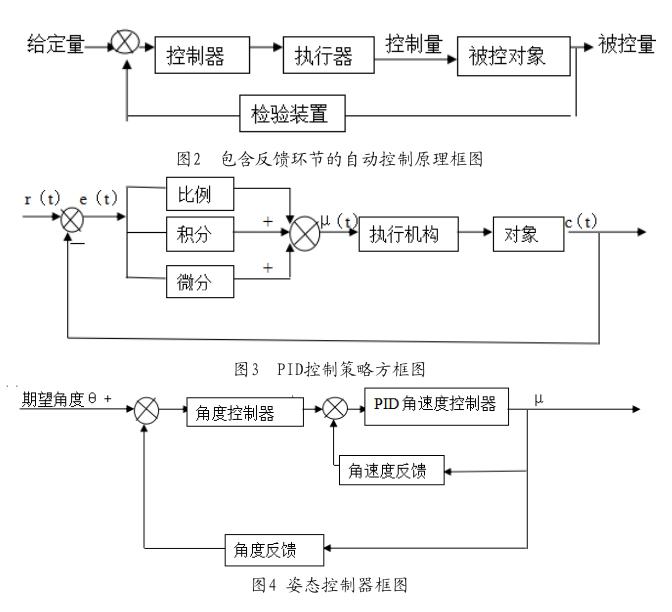
对于一般的自动控制系统,往往遵循图2的控制流程。这是一个反馈控制系统模型,给定的输入信号与通过检验装置得到的被控量输出信号通过比较输入控制器,由控制器控制执行器完成相应的动作,从而使被控对象的被控量输出按照给定的输入量变化。这种反馈机制用于提高系统的稳定性,防止外界的干扰因素对被控对象造成过大的影响。无人机作为一种受外界因素影响较大的自动控制系统也不例外,同样需要相应的反馈环节,因此其控制框图也可以归纳成这样的形式。
在目前的自动控制系统中,使用最为成熟,应用最为广泛的控制策略就是PID控制,其原理框图如图3所示,由比例(P)、积分(I)、微分(D)三部分组成。
比例环节与系统的快速性有关,用于调整控制器的增益,即对输入的误差信号进行放大。积分环节用于调整系统的稳态误差,提高输出的精度。微分环节用于削弱系统的振荡,如果系统存在正方向振荡,只需要添加负值的微分环节即可。对于一般的较为稳定的系统而言,这一环节经常可以被省略。PID控制策略的主要优势在于不需要对被控对象进行精确的建模,通过比较输出特性就可以确定控制器的参数,就能够达到一般的使用要求。
四旋翼无人机系统是一种非线性的系统,由前述的运动原理分析可知,对于复杂的运动状态,系统的各个物理量之间存在着耦合。也就是说,改变一个物理量的参数就有可能对其他参数产生较大的影响,因此提高了控制的难度。不过从实际应用的角度出发,大量实际使用的无人机都采用PID的控制策略,这样在一定程度上就避免了上述由于复杂数学模型带来的不良影响。
在无人机的控制上,我们一般将控制器分成两个部分:位置控制器和姿态控制器。位置控制器是整个控制器的外环部分,通过对方位的确定来保证无人机按照预定的轨迹航行。位置控制器的输出量作为姿态控制器的输入量,也就是说,姿态控制器按照位置控制器的输出量来调整无人机的姿态从而适应当前位置所应进行的运动,以使无人机的运动始终是为了与目标路径相一致。这样的控制器结构分配有助于对信号进行分级处理,将方位信号转化成无人机运动的直接控制信号,有效地对无人机的飞行状态进行适当的调整。
姿态控制器的控制结构图如图4所示,同样采用的是内外环的结构,通过调整和分配无人机各个旋翼的转速,进而调整俯仰角、滚转角和偏航角的大小。基本采用的还是前述的PID控制策略,根据所要完成的飞行任务来确定控制器参数。
4 结论与展望
无人机经过多年的发展,已经具有了非常明显的优势,能够在民用和军用等多种场合得到广泛运用,相信之后的应用领域也会更加宽广。随着新材料、新技术的逐渐出现,无人机的结构设计也会相应地进行调整与进步,从而提升工作载荷并实现更多的功能。无人机的控制策略不只有PID一种,还有其他一些更加智能的控制策略,随着智能化的发展还会得到进一步的研究。相信不久的将来,无人机技术会更加深入我们的生活,为我们的生活增光添彩。
参考文献
[1]邹湘伏,何清华,贺继林.无人机发展现状及相关技术[J].飞航导弹,2006(10):9-14.
[2]陶于金,李沛峰.无人机系统发展与关键技术综述[J].航空制造技术,2014(20):34-39.
[3]淳于江民,张珩.无人机的发展现状与展望[J].飞航导弹,2005(2):23-27.
[4]卢俊文,王倩营.无人机演变与发展研究综述[J].飞航导弹,2017(11):45-48,68.
[5]张睿.小型无人机结构与控制[J].电子技术与软件工程,2017(1):133-134.
[6]赵少雄.无人机自主飞行控制系统设计[D].太原:中北大学,2017.
猜你喜欢
山东工业技术(2016年23期)2016-12-23
企业技术开发·中旬刊(2016年10期)2016-11-12
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
科技视界(2016年6期)2016-07-12
企业导报(2016年9期)2016-05-26
科技视界(2016年12期)2016-05-25
