
基于SCMC/EMCU 51的智能循线车模设计
2018-10-19 06:52安徽工业大学电气与信息工程学院苑香平王镇霖张胜结
电子世界 2018年19期
安徽工业大学电气与信息工程学院 苑香平 王镇霖 陈 阳 王 伟 张胜结
1 前言
感器所受到的干扰,一般在光线较暗的环境中使用该模块。

图1 SCMC/EMCU 51最小系统PROTEUS仿真电路图
众所周知,为激发当代大学生潜在的创新思维而设立的诸如全国大学生电子设计竞赛等各式各样的科技活动不胜枚举。然而,就循线越野类竞赛来说,寻求一种制作成本偏低且能够圆满完成特定任务的车模却是一个永恒的话题。
应此要求,设计出一种智能循线小车模型。该车模不仅有较为简单的硬件结构,而且行车控制程序也得到优化,可通过实际应用进一步测试其动态性能。
2 车体模型设计
2.1 SCMC/EMCU 51最小系统
Single Chip Micro-Computer/Embedded Micro-Controller Unit 51即51单片微型计算机或嵌入式微控制器,外接电源电路、晶振电路和复位电路就可以组成SCMC/EMCU 51最小系统(以AT89C51RD2型单片机为例),其PROTEUS仿真电路图如图1所示。其中晶振X1(频率为12MHZ)、GND、电容C1和电容C2构成晶振电路,VCC、GND、电容C3和电阻R1构成复位电路,电源电路默认。
2.2 红外寻迹
红外对管是一种光电寻迹传感器,主要由发射端和接收端2部分组成,车模可采用2路红外对管模块进行路径识别。其基本工作原理可以简述为:只要每一路传感器的接收端不能够准确地收到发射端发来的信号,那么就表示该模块无法正常工作,相应的TTL输出端自然就不会输出低电平有效信号。为减少传
2.3 直流电动机
直流电动机是一种将直流电能转换为机械能的电磁机械装置,其励磁方式多样,具有良好的调速性能,故车模可用其拖动车体循线行进。
上述3个部分只需加上节能、环保的电源模块便可搭建出如图2所示的智能循线小车模型。

图2 智能循线小车模型简图

图3 车模行车路径
该车模可在图3所示的固定黑线轨道上自由运动,其运动过程如下:人为按下车载启动按钮,车模进入预定轨道,同时SCMC/EMCU 51的内部定时器开始记录车模运行时间。然后,在2路红外对管的引导下,4路小型直流电动机驱动车模行进,直到SCMC/EMCU 51内部定时器所设置的停车时刻来临后,车模才执行停车指令。之后,SCMC/EMCU 51延时继续检测直流电动机的运行状态,若直流电动机持续动作,SCMC/EMCU 51会向电源端继电器发送停车控制信号,彻底断开直流电动机驱动芯片供电电源,以保证车模在该时刻可靠停车。反之,SCMC/EMCU 51不会发出任何操作指令。
值得注意的是,缺乏“灵魂”的车模是无法动作的。因此,只有搭载下文所述的行车控制程序才能达到在循线越野途中某一时刻准确停车的目的。
3 行车控制程序设计
以车模运动过程为基石,可对应绘制出图4所示的行车控制程序流程图,据此能够编制出程序总体框架,以便于进一步模块化编程。
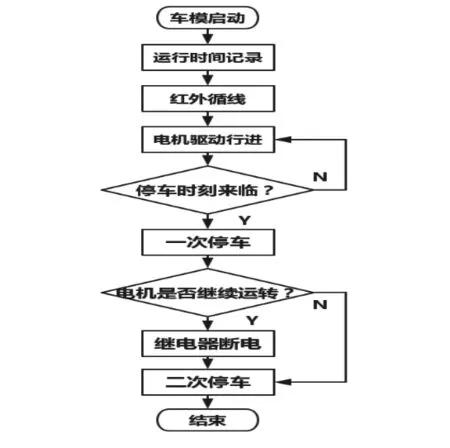
图4 车模行车控制程序流程图
PWM(Pulse Width Modulation)即脉冲宽度调制,该技术基于冲量等效原理,能够对等幅不等宽矩形波脉冲的宽度进行调节以等效获得所需波形。利用其基本原理可以模拟出控制直流电动机运转速度的相关程序,而定时程序的编写也只需合理配置定时器的相关寄存器即可。
下面给出行车控制主程序,对车模动态过程作一补充说明。
“
/************************行车主控************************/
{
Init_TIMER();//定时器初始化—设置车模停车时刻
while(1)
{
void PWM(); //PWM控制调速
while( fl ag_stop == 1) //停车时刻状态标志位检测
{
void car_stop(); //执行停车指令
while( fl ag_motor == 1)//电机状态标志位检测
{
void relay_stop(); //继电器断开—可靠停车
}
}
}
}
/********************************************************/
”
4 结语
该智能循线小车模型集低成本硬件设备与已优化软件控制程序于一体,经验证其动态性能良好,可轻松实现循线越野途中定时停车的功能,因此在全国大学生电子设计竞赛当中取得了优异的成绩。相信随着创新科技的可持续发展,性能更加优良的车模会越来越多。
引文
[1]阎石.数字电子技术基础[M].北京:高等教育出版社,2005:174-178.
[2]皮大能,等.单片机原理与应用[M].西安:西北工业大学出版社,2017.
[3]郭天祥.新概念51单片机C语言教程:入门、提高、开发、拓展全攻略[M].北京:电子工业出版社,2009.
[4]汪晋宽,等.工业网络技术[M].北京:北京邮电大学出版社,2007.
[5]崔健双,等.现代通信技术概论[M].北京:机械工业出版社,2013.
[6]张毅刚.单片机原理及应用[M].北京:高等教育出版社,2003.
[7]付家才.单片机控制工程实践技术[M].北京:化学工业出版社,2004.
[8]沙占有,等.单片机外围电路设计[M].北京:电子工业出版社,2007.
[9]王建校,等.C51系列单片机及C51程序设计[M].成都:巴蜀书社,2002.
[10]宏晶科技.STC12C5A60S2系列单片机器件手册[EB/OL].www.STCMCU.com.
猜你喜欢
装备制造技术(2020年4期)2020-12-25
玩具世界(2020年6期)2020-12-06
经营者·汽车商业评论(2016年5期)2017-11-30
汽车与安全(2016年5期)2016-12-01
汽车维修与保养(2015年12期)2015-04-18
现代企业(2015年4期)2015-02-28
武夷学院学报(2014年5期)2014-07-19
中国交通信息化(2014年4期)2014-06-05
中国造纸(2014年1期)2014-03-01
现代营销·经营版(2013年10期)2013-05-14
