
车联网中V2I通信路由的研究*
2018-10-17 06:37徐会彬焦克莹
传感技术学报 2018年9期
徐会彬,焦克莹
(1.湖州师范学院信息工程学院,浙江 湖州 313000;2.驻马店职业技术学院,河南 驻马店 463000)
作为移动自组织最成功的商业应用之一,车联网VANETs(Vehicular Ad Hoc Networks)[1]已受到广泛关注。VANETs提供车与车之间的车间通信 V2V(Vehicle-to-Vehicle)和车与路旁设施V2I(Vehicle-to-Roadside Infrastructure)间通信,VANETs典型的拓扑结构如图1所示。车辆通过V2V通信交互路况信息,提高交通效率,实现交通预警作用。而V2I通信使得车辆能够接入外界Internet,并且通常采用IEEE 802.11p作为Internet接入技术。然而,由于车辆的快速移动,V2I通信受到挑战[2-3]。

图1 VANETs的拓扑结构
在VANETs中,现存多数路由协议是基于车辆移动参数决策路由,但是它们忽略了一些因素,如信号接收质量、路径衰落以及干扰,其中多径衰落是影响移动自组织网络吞吐量的主要因素。信道衰落会导致物理层PHY(Physical Layer)、介质访问控制MAC(Media Access Control)或网络层的吞吐量的下降。如文献[4]采用了基于概率模型的路由策略,先计算两车辆间链路的连通概率,再估算它们的连通时间。而文献[5]采用基于按需距离矢量AODV(Ad-hoc On-Demand Distance Vector)[6]的链路感知路由,通过收集车辆的移动信息,计算链路的持续时间。类似地,文献[7]面向高速场景,提出基于车辆移动预测的路由。尽管这些路由从不同角度提出不同路由,对路由性能有一定的改善。但是,这些路由并没有考虑到路径衰落对路由的影响。
为此,本文提出面向Nakagmai衰落信道的V2I通信路由FCCR路由。FCCR路由利用车辆移动参数和多径衰落计算路由指标,这有利于路由稳定性。仿真数据表明,提出的FCCR路由有效地提高吞吐量,也降低了路由开销。
1 FCCR路由算法
首先依据信道统计衰落参数和链路期望时效计算链路有效寿命,然后再计算路径的有效寿命,最后选择寿命最长的路径传输数据。
1.1 稳定链路指标
FCCR路由引用有效链路寿命(Effective Link Life Time,ELLT)作为链路指标。通过移动参数[8]和信道衰落[9]的统计值估计链路的ELLT。令ij表示移动节点i、j的链路,则链路ij的ELLT:
ELLTij=LETij×(1-ε)
(1)
式中:LETij表示链路ij的期望时效[5],其等于在理想环境下链路的最长持续时间。所谓理想环境是指无衰落,即ε=0。而ε为衰落系数。在无障碍的高速环境中,ε值较小,而在城市环境,由于建筑物的影响,ε值一般较大[10]。从式(1)可知,实际上,LETij表示链路的最长持续时间。
1.1.1 计算LETij
假定在时刻t,车辆i、j的位置分别表示为(xi,yi)、(xj,yj)。它们的移动方向分别表示为θi、θj,且瞬时移动速度分别为ϑi、ϑj。依据文献[5],LETij表示链路ij的期望时效,其定义如(2)所示。
(2)
式中:a=ϑicosθi-ϑjcosθj、b=xi-xj、c=ϑisinθi-ϑjsinθj、e=yi-yj。
1.1.2 估算参数ε
通过对衰落环境的统计计算参数ε,其定义如式(3)所示:
ε=1-E[φ]
(3)
式中:φ表示链路ij的连通概率。E[φ]表示概率φ的期望。具体而言,当信号接收功率高于预定的门限值时,此链路被认为是连通的。
①成功接收消息概率φ
要计算式(3),首先得推导成功接收消息概率φ。本文利用Nakagami-m分布描述无线信道模型的多径衰落问题。引用文献[11]的面向衰落的数字通信分析,可得Nakagami-m的概率密度函数Fd(χ;m,Ω)为:
(4)
式中:χ表示信号的接收功率,而d为传输距离。Ω表示在离d处给定的平均功率强度。
当接收信号的功率高于接收门限值Rth,则可成功接收此消息。换而言之,Rth也可理解成:在维持通信距离CR(Communication Range)的最小接收功率。因此,成功接收消息的概率可表示为PR(χ>Rth):
(5)
当Nakagami信道m=3(快衰落)时,可得:
(6)
依据Friss-模型[12],并考虑二次路径衰落(Quadratic Path Loss),可计算Rth,如式(7)所示:
(7)
式中:Tp表示传输功率。而参数G的定义如式(8)所示:
(8)
式中:Gt、Gr分别表示发射器、接收器的天线增益。而λ为波长。L为路径衰落因子,通常设为1。
再引用Friss-模型(式(7)),可得在离发射距离为d处平均功率Ω。即用d替换式的CR。
Ω=Ω(d)=(Tp/d2)G
(9)
最后,将式(7)和式(9)代入式(6)可得:
(10)
为了简化描述,车辆的通信距离为R。并用φ表示成功接收消息的概率,因此,式(10)可转换为:
(11)
②概率φ的期望E[φ]
由于车辆不断地移动,车辆间的相对距离d随时间在变化,因此概率φ也随车辆移动在变。为此,利用连续随机变量z代替式(5)距离d。
因此,结合文献[13],概率φ的期望可表示为:

(12)
式中:fZ(z)为概率密度函数。
接下来,依据3种不同的情况,计算E[φ]。
A.车辆i、j间距离是常数,即两车辆匀速同向行驶。在这种情况下,可依式(13计算E[φ]:
(13)
B.车辆i和j反向移动,且两车间距离越来越远,如图2所示。在这种情况下,变量z的概率密度函数如式(14)所示:
(14)
依据式(14),可计算计算E[φ],如式(15)所示:
(15)

图2 反向移动的通信链路
C.如果两车辆同向移动,如图3所示。
图3所示的这个情况可细化为两个场景:(a)当车辆j的行驶速度大于车辆i的行驶速度时;(b)车辆i的行驶速度大于车辆j的行驶速度。第1个场景,会导致它们的距离逐步加大,而在第2个场景中,它们相的距离逐步减少。但不论距离加大还是减少,只要它们在彼此的通信范围,内变量z反映两车辆间的距离信息。一旦超过通信范围,则变量z的概率密度函数就为零。因此,变量z的概率密度函数如式(16)所示:
(16)

图3 同向通信连接
依据式(16),E[φ]可依式(17)计算:

综上所述,估算有效链路寿命ELLT的过程如图4所示。

图4 计算链路有效寿命过程示示意图
1.2 路由策略
若节点i需向目的节点F发送数据,节点i就需建立连通节点F的路径。据此,节点i先传输路径请求控制包PRP(Path Request Packet)。PRP控制包蕴含了节点位置以及方向等移动信息。一旦接收到PRP包,邻居节点(假定为节点j)就依据式(1)计算与节点i连通链路的链路ELLT。
然后节点j就将ELLTij值和自己的ID号载入PRP包,再继续转发。直到控制包被传输至目的节点F。目的节点F可能收到来自不同路径的PRP包。为此,目的节点F先计算每条路径的有效寿命ERLT(Effective Route Life Time)。路径ERLT等于整条路径中链路ELLT的最小值。
具体而言,令Rn-1表示由n-1条链路构成的路由,并且这n-1条链路由n个车辆构成。因此,路由Rn-1的有效寿命ERLT就是这n-1条链路寿命的最小值,如式(18)所示:
(18)
由于目的节点F可能获取了多条连通节点i的路径,节点F从这多条路径中选择一条ERLT时间最长的路径传输数据包。
为了更好地阐述FCCR路由过程,引用图例5说明[14]。如图5所示,节点A需要向目的节点F传输数据。节点A先广播PRP包,然后节点B接收了此包,再计算与节点A连通链路的有效时间(ELLTAB=4 s),再将此值载入PRP包,并转播。重复此过程,直到目的节点F收到PRP。

图5 路由选择过程
从图5可知,节点F总收到两条路径信息,分别为A→B→C→E→F、A→B→D→E→F。再依据式(18)可知,这两条路径的ERLT分别为3、4。这说明路径A→B→D→E→F比路径A→B→C→E→F具有更长的连通时间。为此,节点F就选择A→B→D→E→F路径回复确认包,当节点A收到此确认包,就依据此路径向节点F传输数据包。
2 数值仿真
2.1 仿真环境
为了更好地分析FCCR路由性能,利用NS2建立仿真平台。再引用MOVE和SUMO[15]模拟8 000 m的高速公路上车辆移动。所有车辆从高速公路一端移动另一端。假定有N辆随机分布于高速路上,且随机选择10辆车发送CBR,且传输率为20 packet/s。
每次实验独立重复仿真100次,取平均值作为实验数据。此外,为了更好地分析FCCR路由性能,选择基于寿命路由LRP(Lifetime Based Routing Protocol)和M-AODV+[16]进行比较。LRP路由仅是依据移动参数计算链路寿命。而M-AODV+是基于AODV+[17]路由的改进版。
此外,网络内RSU每隔5 s在其1 000 m的区域内广播告知消息。具体地仿真参数如表1所示。
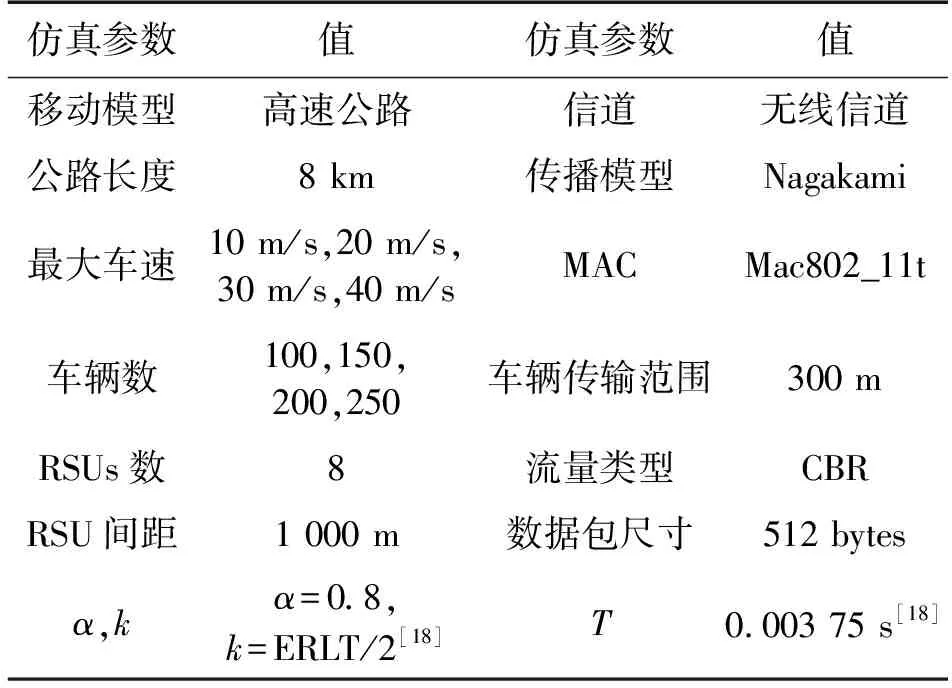
表1 仿真参数
2.1 数值分析
实验中,分析车辆数及车辆移动速度对路由性能的影响,主要分析吞吐量、端到端传输时延和归一化的路由开销。
2.1.1 实验1
本实验分析变化的车辆数对路由性能的影响,其中车辆数从100至250变化,且步长为50。车辆的最大移动速度为30 m/s。实验数据如图6~图8所示。

图8 归一化开销随车辆数的变化

图6 吞吐量随车辆数的变化
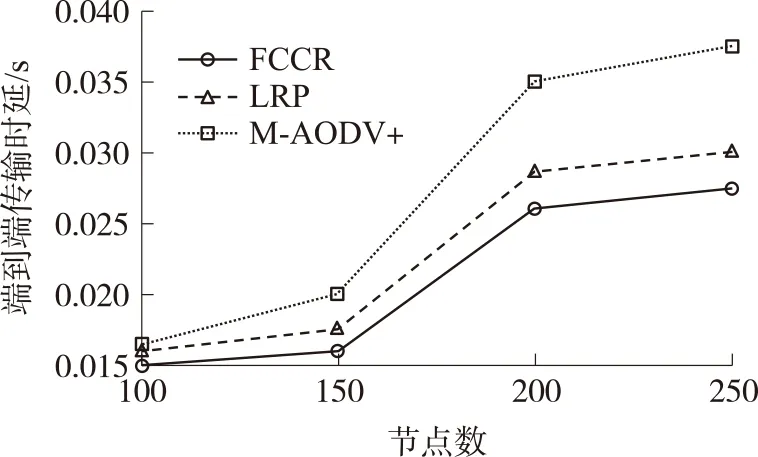
图7 端到端传输时延随车辆数的变化
图6描述了变化的车辆数对吞吐量的影响。从图6可知,车辆数的增加,降低路由的吞吐量。原因在于:车辆越多,信道竞争越激烈,导致数据包传输拥塞,这必然降低了系统吞吐量。与LRP和M-AODV+相比,提出的FCCR的吞吐量得到有效地提高。这要归功于FCCR路由选择了更稳定的路由,降低了路由断裂概率。
车辆数对端到端传输时延的曲线如图7所示。从图7可知,车辆数的增加,提高了端到端传输时延。原因与上述类似。车辆数的增加,提高信道拥塞概率,增加了数据包传输时延。然而,与LRP和M-AODV+相比,提出的FCCR路由的端到端传输时延得到控制。而M-AODV+协议的端到端时延最高,原因在于:M-AODV+路由是依据路径路数选择路由,这降低了路由的稳定性,会导致路由频繁地断裂,增加了传输时延。
最后,分析归一化路由开销受车辆数的变化情况,如图8所示。从图8可知,FCCR开销最低,而M-AODV+最高,LRP路由介于两者之间。尽管LRP路由选择最稳定路由,但是它们可能一些衰减,降低了数据包的接收概率,这加剧了网络拓扑结构。而M-AODV+的路由开销最高,主要是因为M-AODV+总是路径跳数选择路由,路径缺乏稳定性。
2.1.2 实验二
本实验分析最大车速对路由性能的影响,其中车速从10至40变化,且车辆数为200,实验数据如图9~图11所示。

图9 吞吐量随最大车速的变化
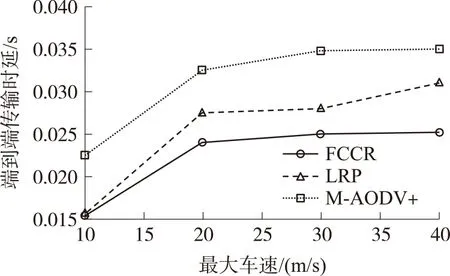
图10 端到端传输时延随最大车速的变化

图11 归一化开销随最大车速的变化曲线
从图9可知,车辆对系统吞吐量有较大的影响。在车速不快时(最大车速在10 m/s~20 m/s期间),有更多车辆进入自己的通信范围,这有利于路由的建立,并且FCCR和LRP路由是依据车辆移动参数决策路由。因此,在低速移动时,FCCR和LRP路由协议的吞吐量随车速移动而上升。但是,当最大车速达到20 m/s后,车速的增加降低了吞吐量,原因在于:当车速过快时,车辆间的通信时间就越短,即链路连通时间变短,这不利于数据传输,因此降低了吞吐量。然而,M-AODV+路由相比于LRP和FCCR路由,它的路由性能最差。原因在于:M-AODV+路由并没有考虑了稳定路由指标,而LRP和FCCR路由在决策路由均考虑了移动参数,提高了路由稳定性。
相比于M-AODV+路由,LRP路由性能具有较好的性能,原因在于:LRP路由使用基于节点移动的稳定指标选择路由,这提高了路径的稳定性。但是,LRP的路由性能低于FCCR路由,因为LRP路由并没有考虑了信道衰落问题。
3 总结
本文针对车联网VANETs的V2I通信,提出面向Nakagmai衰落信道的V2I通信路由FCCR。FCCR路由在决策路由时不仅融合了车辆移动参数,还考虑路径衰落信息。先计算链路的寿命,再选择寿命最长的链路构建最稳定的路由。仿真数据表明,提出的FCCR路由降低了开销,降低了时延。实验仿真是针对高速场景,在今后工作中改善FCCR路由,扩大它的应用场景,这将是后期研究工作的方向。
猜你喜欢
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
网络安全和信息化(2018年3期)2018-11-07
集装箱化(2017年4期)2017-05-17
集装箱化(2016年11期)2017-03-29
集装箱化(2016年12期)2017-03-20
电信科学(2016年11期)2016-11-23
系统工程与电子技术(2016年7期)2016-08-21
电测与仪表(2016年17期)2016-04-11
