基于光纤传感检测的矿井人员定位方法*
2018-10-17 06:43:02应启瑞张建国靳宝全
传感技术学报 2018年9期
刘 昕,应启瑞,张建国,董 齐,王 宇,王 东,靳宝全,2*
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,太原 030024;2.煤与煤层气共采国家重点实验室,山西 晋城 048012)
煤炭是我国的主要能源,受煤矿开采条件限制,井下安全形势仍然不容乐观。发生重大灾害事故时,通信是否畅通对于煤矿井下救援工作非常重要,甚至直接关系到救援的成败。但许多灾害事故发生时会导致信息阻断,通信不畅,使得救援人员不能及时准确地获知井下灾变信息,无法取得受困人员的具体分布区域和方位,难以在第一时间实施救援,一定程度上影响了救灾抢险指挥决策[1]。目前,煤矿井下应急救援定位方法主要通过WIFI,ZigBee,甚低频电磁波等无线通讯技术,实现井下工作人员的通信与定位[2-5]。
然而,由于井下地形复杂,工作环境恶劣,这些方法依然存在如下问题:某些情况下通信系统短路或水中浸泡无法正常供电,即使可以供电,受限于现有的供电方式,在灾害发生时只能依托备用电源供电,往往只能维持数小时,甚至更短。某些情况下为防止次生事故,将完全切断矿井下电力供应,现有的通信系统和带电装置也不允许上电使用。无线信号在井下复杂工作环境下衰减较快,为保证定位精度,需大量增加定位节点数量,全覆盖布设难度很大。甚低频电磁波透地通信方式的主要缺点是受困人员必须随身携带通讯装置,而该类设备成本高,无法实现人手一部,因此覆盖面较窄。由于这些问题,使得以上煤矿井下应急救援通讯定位方法应用受限。
Φ-OTDR(Phase-sensitive Optical Time Domain Reflectometer)相位敏感型光时域反射技术作为一种分布式振动的新型监测方案,由于具有长距离、分布式、无电传感的特点[6-8],近年来在国内外得到了广泛关注。该技术由Taylor H F等人于1993年首次提出[9],利用脉冲激光注入单模光纤后的传播特性,在光脉冲宽度内的后向瑞利散射光会发生自相干,作用于光纤的外界振动会改变光纤折射率并导致传输光相位的变化,因而可通过探测后向瑞利散射光的干涉光强来还原外界振动信号。由于瑞利散射信号非常微弱,因此对振动信号的检测与定位一直是国内外研究的热点。重庆大学朱涛等人采用相干法、移动平均算法和快速FFT变换提取了振动波形的频率[10]。中科院上海光学精密机械研究所蔡海文等人提出基于多频率综合鉴别干涉衰落假信号的相位解调技术,获取到高精度的相位分布信息[11]。南京大学张旭苹等人通过相位展开算法,对振动进行定量测量[12]。上述方法均推动了Φ-OTDR系统信号解调与处理技术的发展。煤矿井下应急救援定位对系统实时特征提取提出了更高的要求,因此需要一种能对Φ-OTDR系统进行快速实时振动监测与准确定位的方法。振动信号的实时提取对解调算法、数据采集和传输速度要求极高,FPGA的发展为解决上述问题提供了技术手段。FPGA由于并行运算、灵活度高和高速处理等优点,适用于信号的高速采集[13-15]。本文设计一种Φ-OTDR振动信号高速采集系统的FPGA实现方案,以FPGA控制芯片为主要控制单元,利用AD9226高速采集芯片和PL2303芯片组成采集和数据传输硬件系统,具有采集速度快、精度高、传输性能稳定、实时性好的优点,以满足实时显示振动频率与波形信息的需求。
本文提出基于光纤传感检测的矿井人员定位方法,利用既有的通信光缆既作为传感器又作为通信介质,具有本质安全,无电传输,抗干扰强的特点,可实现长达几十公里的分布式监测,其传感距离可覆盖整个矿井,灾害发生后,即使无电也能对井下工作人员拍击信号进行有效定位,解决灾变发生之后被困人员与救援机构第一时间联络定位的问题。
1 振动监测原理
光在传播过程中,通过长度为l0的光纤所产生的相位延迟量φ为:
(1)
式中:λ为光的波长,β为传播常数,n为光纤折射率。当外界振动作用于传感光纤时,光纤因受压力P的作用,折射率发生改变,进而导致光相位变化,其变化量Δφ为[16]:

(2)

(3)
(4)
式中:Δφε,Δφs分别为应变效应和光弹效应造成的相位变化,ετ为纵向应变张量,E为光纤的杨氏模量,μ为光纤的泊松系数,k0≈β/n,S为光弹张量系数值。相位变化量Δφ与压力P的关系如下:
(5)
因此,相位变化量Δφ与振动施加给光纤的压力P成正比,可以通过解调光相位来获得外界振动信号。同时,通过入射脉冲光与接收后向瑞利散射光的时间延迟来定位振动信号的位置x:
(6)
式中:t0为后向散射光强度发生变化的时刻。系统实验原理如图1所示,窄线宽激光器发出连续激光,通过偏振控制器调整偏振态后由声光调制器将其调制为脉冲光,经掺饵光纤放大器(EDFA)增强功率后通过环行器注入到传感光纤中。最后,高速采集系统通过探测器接收到的后向瑞利散射信号来实时采集并解调光纤周界的振动信息。
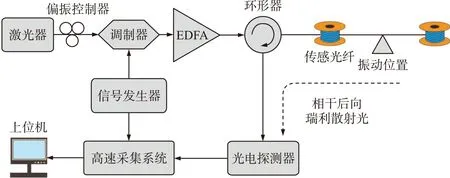
图1 Φ-OTDR振动监测系统
图2所示为后向瑞利散射波形。定位振动点需要大量数据进行差分累加运算,实验中采用高速采集装置对后向散射信号进行采集,并使用数据处理软件对信号进行分析。

图2 后向瑞利散射波形
图2中实线代表第i次采集的数据,虚线代表第i+1次采集的数据。在振动施加处(约1 100 m)之外,两者在整个传感距离上差异很小,而在振动点处差异非常显著,证明在该点处振动信号的存在。由于信号信息量大,而受到采集传输速度的限制,振动信号实时提取与还原是一项技术难题。因此需要结合高速A/D与FPGA技术进行数据的快速采集和处理,在振动处实现波形的实时提取与定位。

图3 采集系统原理图
2 高速采集系统
高速数据采集原理如图3所示。光电探测器检测到的后向瑞利散射信号经FPGA(Altera,EP4CE617C8)控制选通的通道进入高速采集系统,经由信号调理电路和衰减电路处理后由高速A/D芯片将模拟信号转换为数字信号输出至FPGA进行存储。同时,在FPGA中设计时钟处理单元和存储单元用于控制 A/D 的采样时序、同步信号和数据存储。PC端控制软件通过2种方式与FPGA进行通讯,通过并行接口与FPGA进行系统程序的调试并控制系统的复位、工作使能、模式选择等,FPGA也将运行状态如存储器的存放信息等反馈给PC,相互配合进行系统的控制。为了保证信号提取的实时性,上位机通过通用总线对系统的数据进行控制传输和实时显示,完成对光纤振动信号的采集。
2.1 A/D转换电路
Φ-OTDR振动信号高速采集系统要求数模转换电路具备较高的转换效率与采样精度,以满足振动信号监测的实时性与精确性要求。为保证Φ-OTDR系统具有较好的检测精度,当A/D的转换速率在50 MS/s以上,转换位数在10位以上时,此时采样间隔为2 m,从而能够较好地检测出外界振动信号。因此,选用采样精度为12位、转换速率为65 MS/s的AD9226芯片。
由于AD9226的芯片ADIN端口电压为1 V~3 V,而ADIN输入端的实际电压Vin为-5 V~+5 V,因而需要设计衰减电路进行电压匹配,如图4所示为采集模块衰减电路。

图4 采集模块衰减电路
图4中VREF端输入的电压为2 V,根据电压跟随和放大原理,可得NREF的电压VN为-2 V。因而输出电压为Vout为:
VA=Vin×(R10/R11)
(7)
Vout=VA+R9×(VA+VN)/R8
(8)
(9)
即当输入Vin为-5 V~+5 V时,输出电压Vout为1 V~3 V。AD9226时序图如图5所示。

图5 AD9926芯片时序图
逻辑输入端口外接模拟信号,时钟端口通过监测信号上升沿来触发数据采集,再经数据输出端口还原出接入系统的模拟信号波形。A/D采样率越高,对应波形采集的点越多,信号还原度越高。由图5中时序图可知,通过FPGA控制时钟信号即可实现A/D芯片的信号采集。
2.2 USB传输电路设计
系统选择通过USB芯片将A/D采集的数据传输给上位机,实现系统的实时传输。设计电路采用集成RS232-USB转换器的PL2303芯片,将接收的数据转换为USB数据格式,并与上位机进行数据传输。PL2303芯片的外围电路如图6所示。
图6中VDD1为USB端口的5 V供电电源,VDD2为RS232的3.3 V供电电源,OSC1和OSC2产生12 M的晶振,DP和DM端口分别与USB端口的D+和D-进行通讯,TXD和RXD进行串口的数据输出和输入。

图8 整体系统RTL视图

图6 PL2303芯片外围电路示意图
3 软件系统设计
软件系统主要分为A/D采样和串口数据传输两部分,通过Verilog HDL语言编写上述模块,生成的两个主要RTL视图如图7(a)~(b)所示。
图7(a)是采集模块的RTL封装视图,图7(b)是传输模块的RTL封装视图。采集模块的输入信号为:使能信号En_Count用于控制采集的开始、数据输入ad1_port[11..0]为AD9226的12位数据线、输入时钟clk_50M为FPGA的晶振时钟、复位信号rst_n用于整个模块复位,低电平有效,以及选取采样点的计数输入count_num[13..0],用来控制选取振动采样数目。

图7 采集模块和传输模块RTL视图
传输模块的输入信号为:传输数据输入TX_Data[7..0]为串口发送的数据、传输使能信号Tx_En_Sig控制串口发送数据、时钟控制输入clk_50M为串口波特率时钟、复位信号rst_n用于复位整个传输模块。
整体系统RTL视图如图8所示。采集模块Phase_OTDR_CountModule将采集到的数值输出至数据处理转换模块Phase_OTDR_Value_Module,将数据转换为串口传输模块的输入信号,进而通过串口传输模块tx_module将数据输出至上位机。
4 系统测试结果
利用SignalTap Ⅱ观测FPGA的内部信号,输入信号为50 Hz正弦波,设置采样深度为2 k、采样时钟频率8 kHz,测到的输入数据和各A/D端口的输出如图9 所示。
由图9可知,随着输入正弦信号幅值周期性的变化,A/D输出的12位端口的数据也发生对应的周期性变化,从而证明该采集系统工作满足要求。
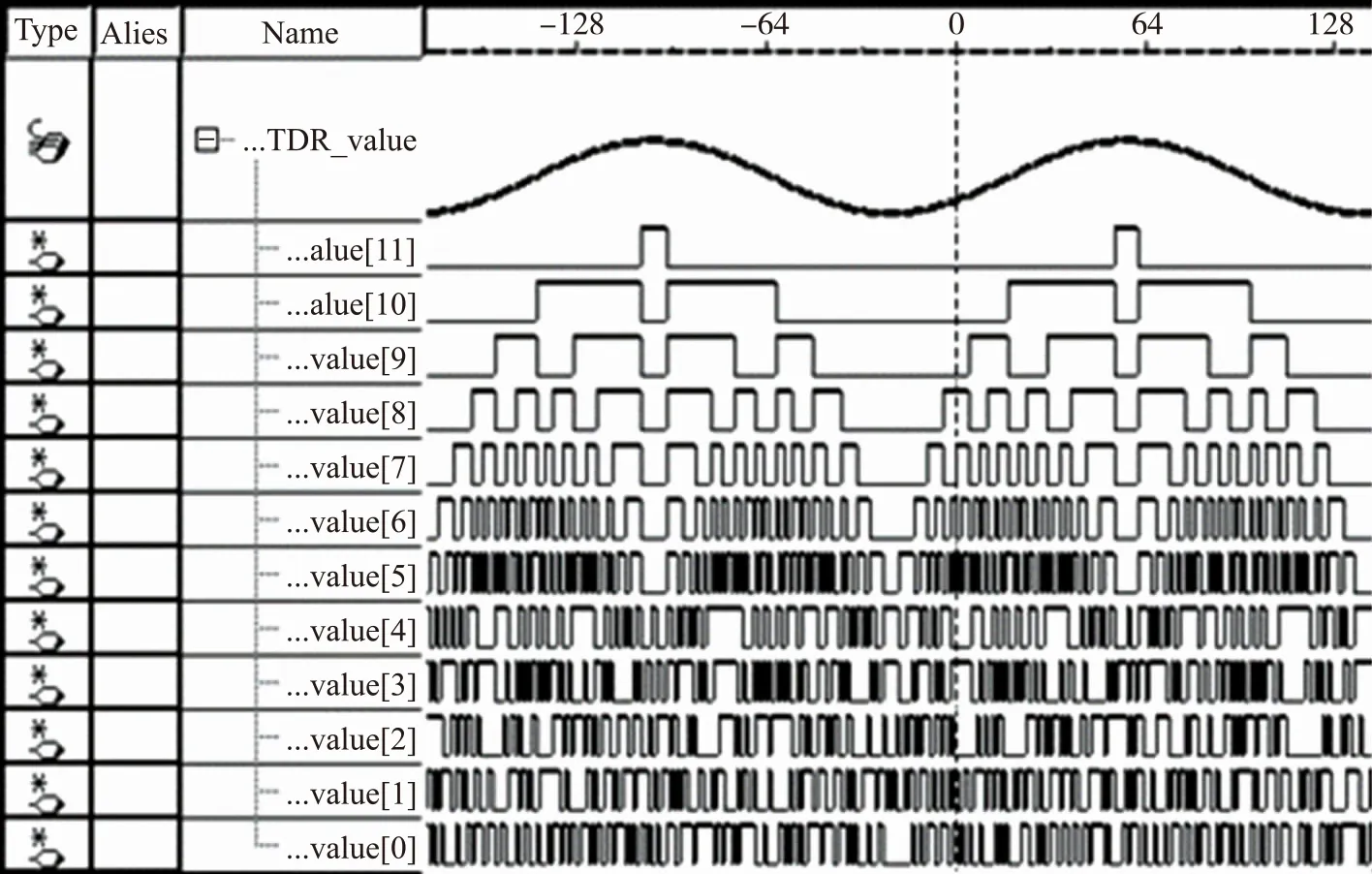
图9 SignalTab Ⅱ观测到的采集波形
将程序写入高速采集系统的FPGA内核。实验测试首先采用规律性拍击信号作用于传感光纤,光纤对应于振动位置处单点振动信号的监测结果如图10所示,证明系统能实时响应拍击所施加的振动信号。

图10 规律性拍击时域信号图

图11 方波激励时的探测信号
随后,用压电陶瓷模拟外界振动,振动激励信号为幅值±10 V、频率20 Hz的方波。实验结果如图11所示,其中虚线为实时采集到的振动信号波形,实线为拟合后的振动信号波形。结果显示,在20 Hz方波信号的激励下,通过对时域信号拟合,还原出的振动信号为频率f=1/ΔT=20 Hz的方波信号,与振动源波形一致。
将振动源激励信号改变为幅值±10 V、频率200 Hz的正弦波,同样将采集的单点振动时域信号进行拟合运算,还原出振动信号的波形,拟合后的波形如图12所示。
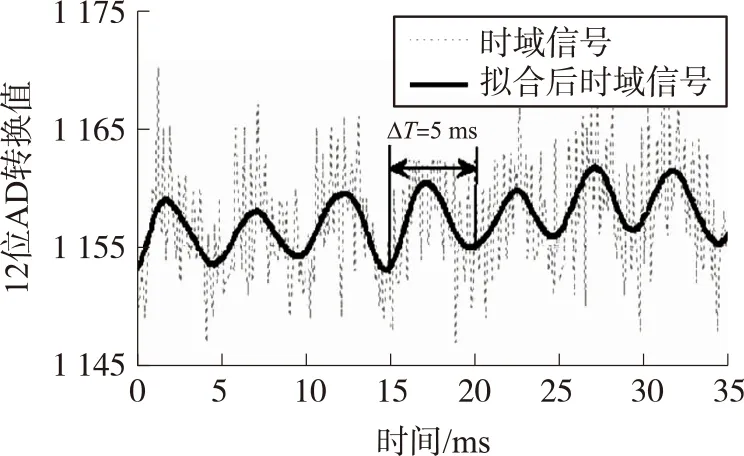
图12 正弦波激励时的信号
结果显示,还原出的振动波形信号的频率为f=1/ΔT=200 Hz,准确还原出了振动源的振动信息。虽然采集过程中的环境噪声和振动传感系统本身存在的漂移问题导致拟合出的振动信号存在小范围的抖动,但并不影响提取出的振动信息有效性。
为了验证外界扰动信号振动频率与监测到的振动频率间的关系,在100 Hz到1 000 Hz的频率范围内,以100 Hz为步进来改变驱动压电陶瓷的激励信号,作为输入信号的频率,同时分析10组高速采集系统探测到的数据,以判断系统的频率响应。
图13所示的系统探测频率y与实际驱动信号的振动频率x的拟合线性关系式为y=0.992 5x-4.614,拟合的线性度为0.995 07,由此可知外界振动信号的频率与系统监测到的频率基本保持一致。

图13 频率线性拟合
随着光纤距离的增加,后向瑞利散射光越来越微弱,因此,越后端的振动信号检测难度越大。分别在10 km、12 km附近施加振动信号,定位结果如图14所示。从图14可以看到在10.07 km处有明显的尖峰,在12.01 km处虽然信噪比较低,但仍然可以观测到振动发生,证明系统传感距离可达12 km。

图14 振动定位结果

图15 4 663 m处定位误差测试图
为了测试系统定位误差,选取了两个振动测试位置,分别在4 663 m和10 022 m。在同一位置处重复进行50次人员触碰检测,图15和图16所示为定位的结果。图中红色虚线为实际振动位置,黑色散点为定位结果。从图中可以看到,综合定位误差范围为-7 m~+11 m。

图16 10 022 m处定位误差测试图
5 结论
本文通过利用基于Φ-OTDR技术的振动提取原理,FPGA硬件采集系统和软件系统设计,构建出高速采集的Φ-OTDR振动监测系统。实验选取规律性拍击信号、20 Hz方波与200 Hz正弦波来模拟外界振动信号,测试结果表明该方法可以提取出外界振动信号的波形及频率信息。同时,经验证系统对1 kHz以下振动信号具有良好的频率响应特性,可实现12 km范围内振动精确定位,综合定位误差范围为-7 m~+11 m。提出的基于光纤传感检测的矿井人员定位方法,可在灾害发生后的恶劣环境下实现无电情况下人员的准确定位,从而为井下通信中断时快速确定受困人员位置提供一种新的解决方案。
猜你喜欢
中国特种设备安全(2021年9期)2021-03-02 05:40:46
家庭影院技术(2020年1期)2020-06-24 05:59:20
电脑知识与技术(2019年24期)2019-11-03 13:11:42
家庭影院技术(2019年4期)2019-04-17 05:12:56
测控技术(2018年2期)2018-12-09 09:00:46
家庭影院技术(2018年9期)2018-11-02 05:31:36
成都信息工程大学学报(2018年2期)2018-06-27 08:22:22
电子制作(2017年13期)2017-12-15 09:00:11
通信电源技术(2016年3期)2016-03-26 07:13:14
防灾减灾学报(2015年3期)2015-12-16 16:15:40