基于约束TBD的GEO目标在轨检测方法
2018-10-17 08:33王鲲鹏谭继波吴文堂黄建余
空间碎片研究 2018年3期
王鲲鹏,谭继波,吴文堂,黄建余
(北京跟踪与通信技术研究所,北京100094)
1 前言
空间目标观测主要有地基观测和天基观测两种途径。相比于地基观测系统,天基观测系统具有全天时、全天候、全空域观测、具备抵近详查能力、作用距离远等优点,正日益成为空间目标观测的重要发展方向[1,2]。对静地轨道 (GEO)目标进行探测是天基空间目标观测的重要任务之一,通过对天基观测图像的处理与分析可实现GEO目标的动态编目维护和精密定轨预报,为空间目标碰撞预警和空间态势评估提供信息支撑。随着大面阵探测器的广泛使用和成像帧频的不断提高,天基观测图像的数据量成倍增加,为降低数传压力和提高图像处理效率,十分有必要开展观测图像的在轨检测处理,仅将处理后的目标定位数据下传,可大幅降低数传的数据量,目前国外天基空间目标观测系统通过在轨目标检测方法可达到数据压缩比大于1000∶1的效果。
在天基GEO目标观测系统中,目标距离往往较远,卫星、空间碎片等空间目标在图像中的成像尺寸较小,信号强度也较弱,在图像上表现为点状、光团状的形态,图像背景中伴随出现大量恒星目标,同时受天地杂光、空间辐射等因素影响,GEO目标的信噪比普遍较低,给目标自动检测与定位带来了难度。目前,对于这类弱小目标的检测主要有两种方法[3],即跟踪前检测 (Detect Before Track,DBT)和检测前跟踪 (Track Before Detect,TBD)。DBT方法[4]对每帧图像都做出目标存在与否的判断,然后目标跟踪算法把观测结果与目标轨迹进行关联,做出相应判决,这些方法主要利用目标图像的空间特性来检测小目标,忽略了目标和背景杂波的时间特性。TBD方法[5,6]根据多帧检测的思想,将空间和时间信息并入多帧处理过程中,较适合于低信噪比 (如弱小目标淹没在复杂背景或噪声)条件下的目标检测,但计算量往往较大,实时性较差。
本文在分析天基观测图像中GEO目标运动规律及成像特点的基础上,提出了一种基于约束TBD的GEO目标检测方法,先从高信噪比目标中分析确定TBD算法的搜索范围,然后利用动态规划TBD方法进行低信噪比目标检测,能大幅降低TBD方法计算量,实验结果证明了该方法的有效性和可靠性。
2 算法基本原理
2.1 目标图像特点
GEO观测图像以深空为成像背景,图像中分布着不同星等的恒星,背景像素灰度级较低且不均匀,空间目标成像受杂散光、空间高能粒子、星云等干扰影响,信噪比差异很大,图1的 (a)~(e)图分别给出了目标成像模型以及空间辐射噪声、热噪声、拖尾、背景杂光等干扰因素的影响示意图,下面将具体分析高信噪比目标和低信噪比目标的成像特点与运动规律。
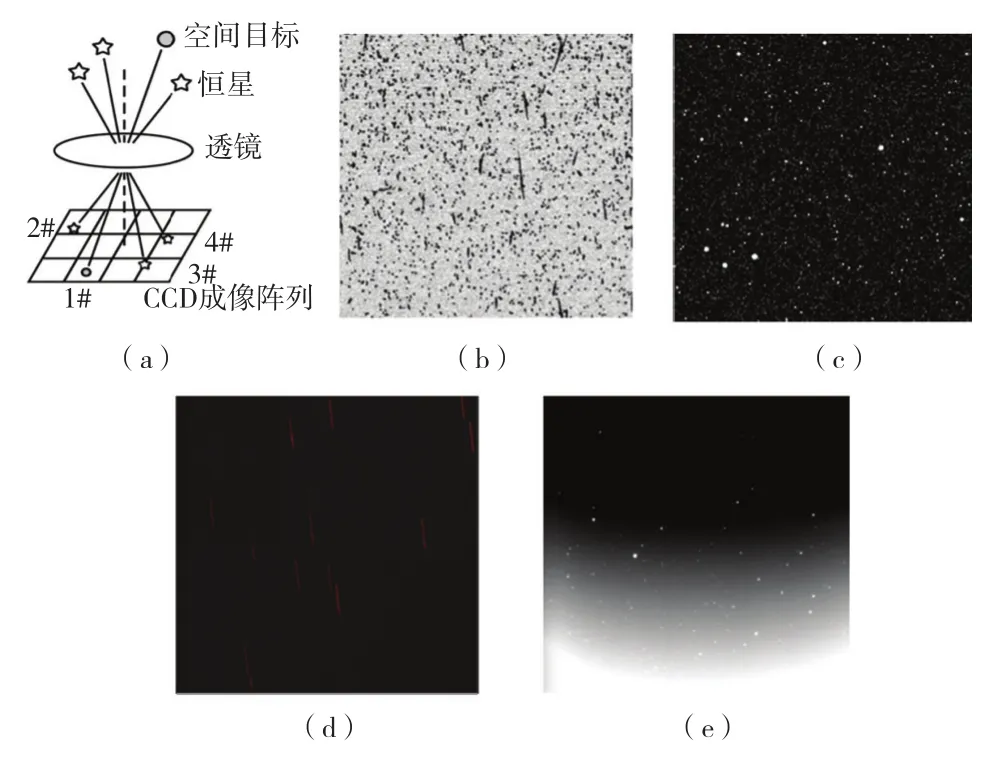
图1 天基观测系统成像关系及影响因素示意图Fig.1 Schematic diagram of space-based observation system imaging relations and influence factors
(1)高信噪比目标
在图像序列中选择信噪比相对较高的目标,对目标进行阈值分割,计算目标信噪比,分析其在时间变化特点,如图2所示。从中可以看出,高信噪比目标的信噪比受背景干扰因素影响,存在一定程度变化,但总体上仍属于较易检测目标。此外,目标的灰度分布不是理想的二维高斯分布,主要原因是曝光时间内目标产生了运动所致,且外界噪声干扰在一定程度上也影响了目标的形态。

图2 高信噪比目标的信噪比时域特性与灰度特性Fig.2 SNR time-domain and gray-level characteristics of high SNR targets

图3 图像序列间不同目标的运动速度统计Fig.3 Kinematic velocity statistics of different targets between image sequences
(2)低信噪比目标
低信噪比目标成像特点与高信噪比目标类似,但由于目标信号更为微弱,信噪比一直处于较低水平,且更易受到背景和噪声干扰,直接采用高信噪比目标检测方法将很难检测出目标。但考虑到GEO目标轨道的相似性,使其在观测图像中存在较为一致的运动规律,图3为图像序列中不同目标的运动速度统计结果,从中可以看出,同一帧图像内不同目标的运动速度差别较小。
2.2 算法流程
根据上述分析,可利用GEO目标观测图像中高信噪比目标和低信噪比目标的运动相似性,分步骤进行目标检测。首先通过帧间差分方法获得高信噪比目标的运动速度,再由此约束TBD方法的搜索范围,采用动态规划方法检测低信噪比目标,实现了高信噪比目标与低信噪比目标的分步检测,基本检测流程如图4所示。
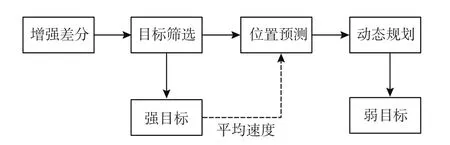
图4 目标检测算法流程图Fig.4 Flow diagram of the target detection algorithm
3 算法实现
3.1 高信噪比目标检测
(1)帧间差分
对于高信噪比目标,可利用临帧差分方法消除恒星目标及背景后检测出目标[7]。临帧差分法的基本原理是直接比较两帧图像对应像素的灰度值,若灰度变化大于某阈值,则认为检测出目标。帧f(x,y,j)与帧f(x,y,k)之间可用一个二值差图像DPjkf(x,y)表示:

式中T是阈值,该阈值代表正常情况下相邻两帧图之间由于光照等影响而产生的正常灰度变化。对于高信噪比的GEO目标,由于目标灰度大于背景灰度,可在此基础上应用正负差图像法得到较好的检测效果。对于相邻的两帧图像f(x,y,j)和f(x,y,k),假设某目标在第j帧的位置为(x1,y1),在第k帧的位置为(x2,y2),那么第j帧图像在(x1,y1)的灰度值必定大于第k帧图像点(x1,y1)的灰度值,同样第k帧图像点(x2,y2)的灰度值也必定大于第j帧图像点(x2,y2)的灰度值,即:

对满足f(x,y,k)-f(x,y,j)>T的点应为第k帧图像上的目标点,对满足f(x,y,k)-f(x,y,j)<-T的点应为第j帧图像上的目标点。为减少背景及噪声干扰,在进行帧间差分后,还需进行形态学处理,进一步抑制背景突出目标,便于目标检测。
(2)目标帧间匹配
根据观测相机参数,可大致计算出目标在图像中的运动信息,包含速度大小、方向变化范围等,利用此速度信息进行目标跟踪,可有效减少计算量,如下式所示。

式中,v表示每个候选目标的速度;Candk表示候选目标;V0表示根据纬度信息获得的目标速度先验信息。S是根据图像实际情况确定的筛选规则。为了减少计算复杂度,可以按照下式确定S,m表示误差允许范围。

(3)目标运动速度计算
利用图像序列中高信噪比目标检测与匹配结果,可计算图像中每个目标的运动速度。考虑到成像条件复杂,单个目标的速度可能存在一定的系统误差和随机误差,本文计算所有高信噪比目标的平均速度。
3.2 低信噪比目标检测
对于低信噪比目标检测,常用方法是在多帧图像序列中估计目标的运动轨迹,沿轨迹进行目标能量积累,然后对积累后图像进行检测判决。这里采用动态规划算法检测低信噪比目标,将穷举搜索视为马尔可夫过程,通过分段最优化解决小目标检测的轨迹搜索问题,在算法结构上可以得到一个性能优良且可实现的方案[8]。
考虑一个普通的包含N×N个分辨单元构成的测量,在每个时刻k,测量值在各个单元中被记录,在k时刻记录的总测量是一个N×N矩阵:

式中,1≤i,j≤N并且z(i,j)(k)是时刻k分辨单元 (i,j),中记录的测量值,由式 (8)给出。

A(k)表示目标的幅度,为了简化,假设为常数,也就是说A(k)=k,假设附加噪声w(i,j)(k)∶N(0,δw2)对于不同的K,假设为独立同分布的,n(i,j)(k)也是一个随机变量,一般也假设为n(i,j)(k) ∶N(0,δk2)。但它的分布与w(i,j)(k)的分布有区别。
一个目标轨迹被定义为目标从时刻1到时刻M(总的时间是MT)为一系列的连续状态x(k)的集合。因此在M时刻的一个轨迹定义为

式 (8)、式 (9)构成基于动态规划的TBD算法的基本递推关系。TBD问题归结为用测量序列Zk(这里Zk={Z1,…,Z(M)})产生M时刻的值函数hM(xM),再按照下面公式,确定检测结果并且决定最有可能是实际目标的轨迹:

这里VT是一个门限,是目标的一组估计值。将假设目标在各时刻幅度值作为阶段指标函数,构造值函数,那么目标函数将在所有可能轨迹中寻找目标幅度值满足要求的轨迹。
综上,先根据临帧差分法得出高信噪比目标在观测图像序列中的平均速度,再利用该平均速度预测低信噪比目标的位置,如图5所示,红色圈表示目标当前位置,蓝色圈表示目标的预测位置。从图中可以看出,采用常规动态规划算法进行多帧序列图像能量累积时,以目标当前位置为下一帧前 (后)集中心,而本文根据目标的当前位置和速度预测下一帧的位置,以预测位置为中心。考虑到高信噪比目标和低信噪比目标运动形式的细小差异,同时低信噪比目标运动速度在不同帧之间也有一定的起伏,本文在预测速度的基础上适当扩大搜索窗口,得到新的前 (后)集。
图5 位置预测示意图Fig.5 Schematic diagram of position prediction
从图6可以看出,本方法对于信噪比大于2的目标具有较好的检测效果,随着动态规划中累积图像帧数增加,检测率逐渐提升,但计算时间也在逐步增加,综合检测率和检测时间来看,本方法在累积帧数达到6帧或者7帧时性能最优。
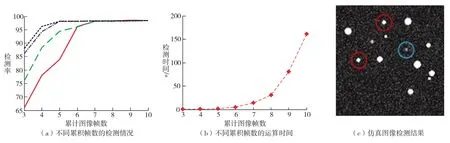
图6 仿真图像试验情况Fig.6 Simulation image test results
4 实验结果
通过GEO观测图像仿真数据,验证本文方法可行性,图像分辨率为128×128,图像序列中有2个信噪比在6~10之间的目标和1个信噪比为2~5的目标,目标的水平速度为2像素/帧,垂直速度为5像素/帧,为图像添加高斯白噪声,最终检测结果如图6所示。
此外,对于不同的图像序列,对比了帧间差分法、传统动态规划方法与本文方法等3种方法的检测时间,本文实验中,传统动态规划方法和本文方法使用的图像累积帧数均为6帧,检测结果如表1所示。经统计,采用帧间差分法会有1~2个目标发生漏检或误检,传统动态规划与本文方法均未出现漏检或误检。

表1 实测图像检测结果Tab.1 Measured image detection results
5 结论
本文提出了一种约束TBD的GEO目标在轨检测方法,充分利用GEO目标在观测图像中的运动规律,采用帧间差分法获得高信噪比目标的运动范围,以此为约束条件,对低信噪比目标进行动态规划的TBD检测,降低了算法搜索计算量,同时保证了低信噪比目标的检测效率。实验证明了该方法的有效性和准确性,经初步分析,当累积帧数达到6帧或者7帧时可达到较好的检测效果。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2022年1期)2022-04-19
国际太空(2022年1期)2022-03-09
国际太空(2022年1期)2022-03-09
北京理工大学学报(2021年12期)2022-01-13
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
军事运筹与系统工程(2020年3期)2021-01-18
舰船电子对抗(2020年1期)2020-04-27
中国信息技术教育(2020年2期)2020-02-02