混合动力汽车的转速转矩双同步换挡控制∗
2018-10-13 02:20胡宇辉乐新宇吴洪振席军强
汽车工程 2018年9期
胡宇辉,乐新宇,吴洪振,席军强
(1.北京理工大学智能车辆研究所,北京 100081; 2.北京理工大学机械与车辆学院,北京 100081)
前言
混合动力汽车兼备纯电动车低碳化和传统燃油车续航里程长的特点,能量补充形式多样化,对传统生产线具有良好的继承性,被普遍认为是可预见未来内传统燃油车高效可行的替代者,因此成为研究的热点。但混合动力汽车由于新增了电机、蓄电池和相关控制部件,导致其换挡过程和换挡控制有别于传统燃油车,对换挡的平顺性和动力性提出了更高的要求。
混合动力汽车,如典型的单轴并联式混合动力AMT汽车,其换挡过程与传统燃油车相比有两个主要的差别:(1)不分离离合器;(2)电机实现转速同步。采用不分离离合器的换挡方式,既减少动力中断时间,显著提高换挡品质[1-2],又可规避离合器高度非线性的控制难点,简化控制逻辑。然而,由于换挡时不分离离合器,变速器输入轴直接与电机、离合器和发动机相连,输入端的转动惯量也因此增加近20倍[3]。最直接的影响就是,仅依靠同步器与接合齿圈的锥面摩擦难以在短时间内实现转速同步。因此,一般是借助电机优良的可控性和快速的响应能力来辅助同步;甚至出于简化控制的需要,进一步弱化同步器,使用电机独立完成转速同步。
为获得优良的换挡品质,须根据换挡过程各阶段的运动学和动力学特征,设计可靠的换挡控制策略。单轴并联式混合动力AMT汽车的换挡过程可划分为动力源卸载、摘挡、主动同步、挂挡和动力恢复等5个典型阶段。为防止摘挡后传动系统出现扭振效应,需要协调控制发动机和电机,使摘挡前变速器轴传递的转矩为零,起到离合器等效分离的效果[4-5]。为减少转速同步时间、减轻同步器的磨损,电机通过转矩补偿辅助同步器快速实现转速同步[6-8];在一些无同步器换挡的场合,仅通过电机调速来实现转速同步[9-10];在挂挡阶段,电机辅助同步和换挡力执行机构的协同控制是提高挂挡成功率的关键[11];在转矩恢复阶段,联合控制动力源的输出转矩可以显著提高车辆的动力性和舒适性[12]。
上述常规的混合动力汽车换挡控制方法在正常工况下可顺利实现舒适换挡,但在大负载、坡道换挡等工况下,就会出现明显的大冲击,且还偶尔挂不上挡。分析其原因,主要是常规的转速同步控制有如下明显的不足之处。
首先,常规的转速同步控制是基于从动端(被同步端)转速不变的假设。但由于大负载和运动阻力的影响,在主动端(同步端)转速调节到目标转速时,从动端转速却在转速调节和挂挡过程中发生了变化,导致在挂挡接合时刻主从动端存在明显的同步速差,造成较大的换挡冲击,在同步速差较大时甚至出现挂挡失败的现象。
其次,常规的转速同步是通过电机的转速模式实现的。但由于采用不分离离合器换挡,主动端转动惯量大,在对齿啮合时可能会因为拨齿困难而导致挂挡失败;在挂挡完成后,也可能会因为主从动端运动趋势不一致而产生突加负荷,进一步导致换挡冲击。
基于以上分析,提出了一种转速转矩双同步的混合动力汽车换挡控制方法。与传统的混合动力汽车换挡控制相比,这种方法的创新之处在于:
(1)在转速同步过程中,电机的目标转速不再是恒定的,而是根据采集到的从动端转速实时调整,最终完全消除同步速差,实现真正意义上的转速同步;
(2)采用转矩模式来调节转速,在实现转速同步时,主动端和从动端具有相同的运动趋势,避免了挂挡结合时的突加负荷冲击,提高了换挡品质。
1 转速转矩双同步换挡控制
1.1 单轴并联式混合动力AMT系统
所研究的单轴并联式AMT混合动力系统主要由发动机、离合器、永磁同步电机、机械式自动变速器(AMT)、蓄电池和相关的控制系统等组成,其中电机输出轴和变速器输入轴刚性连接。各部件和控制系统的构架如图1所示。

图1 单轴并联式混合动力AMT系统结构
1.2 转速转矩双同步换挡控制的原理
在混合动力AMT汽车的5个换挡阶段中,转速同步不再依靠同步器,而是通过独立调节电机转速或转矩来实现的。在整个转速同步阶段,忽略各部件的运动阻尼,则主、从动端动力学方程分别为

式中:ωm和ωf分别为同步器主、从动端的角速度,rad/s;Tm,TL和 Tf分别为电机输出转矩、从动端负载和主动端阻力矩,N·m;Jm和Jf分别为等效到同步器主、从动端的转动惯量,kg·m2。
转速转矩双同步换挡要求在挂挡时主动端和从动端不仅转速同步,且还具有相同的角加速度,即运动趋势一致。因此主、从动端实现双同步时的状态方程应满足:

结合式(1)~式(4)可知,在转速同步末期,要满足转速转矩双同步条件,电机需要输出转矩为

在转速同步过程中,考虑从动端的转速变化,电机的目标转速为

电机转速和目标转速的同步速差为

转速同步过程初始时刻的速差为

在转速同步过程中,电机一直工作在转矩模式下。现设定电机的目标转矩为

式中:nm_des,nm和nf分别为电机目标转速、电机转速和变速器输出轴转速,r/min;in和in+1分别为原挡位和目标挡位的传动比;Tm_des为电机的目标转矩,当其为负值表示与电机转速方向相反,N·m;k为转矩调节因子,且 k>0。
由式(6)~式(9)可知:在升挡情形下,in>in+1,Δn(0)<0,Tm_des<0,电机减速趋近目标转速;在降挡情形下,in<in+1,Δn(0)>0,Tm_des>0,电机加速趋近目标转速。因此,根据式(9)调节电机输出转矩最终可消除同步速差而实现转速同步;另外,当残余速差Δn✍0 时,电机输出转矩 Tm=Tm_des✍T∗m,从而也实现了转矩同步。
电机目标转矩不断更新,而电机的转矩响应却有一定延迟。为不出现电机在响应跟踪Tm_des的过程中,Tm_des再次被刷新的情况,设定一个目标转矩Tm_des的更新周期Tc为

式中Tdelay为电机转矩响应延迟,本文中台架实验的永磁同步电机转矩响应延迟大约为50~70ms。在Tc周期内,电机有足够的时间响应每一个目标转矩指令,并精确跟踪给定的目标转矩值。
1.3 转速转矩双同步换挡控制流程图
根据以上分析,转速转矩双同步的换挡控制流程如图2所示。在转速同步过程中,电机一直工作在转矩模式,并根据同步速差不断调整输出转矩。在每个目标转矩值的生存周期内,电机通过自适应PID控制来响应并跟踪目标转矩。
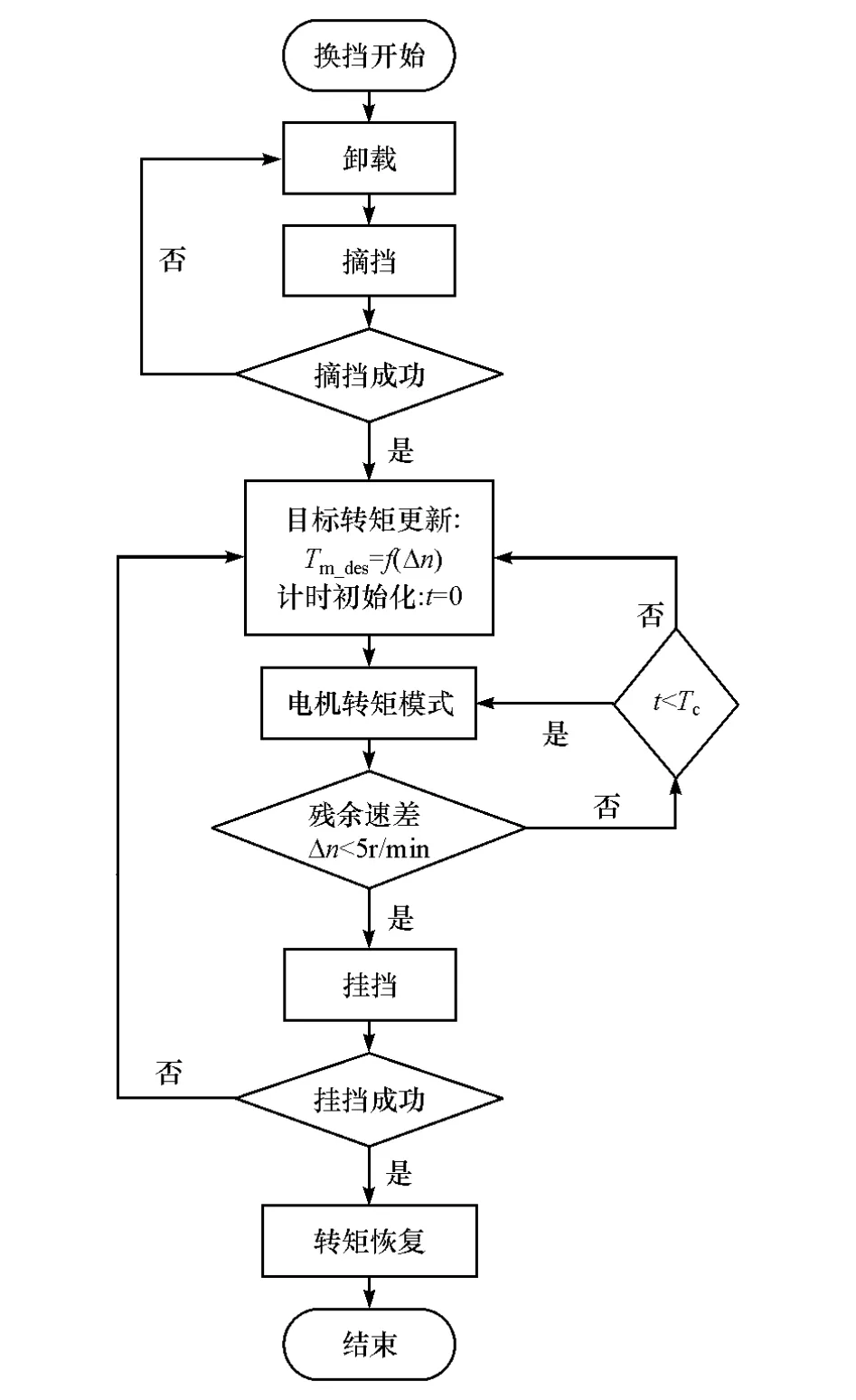
图2 转速转矩双同步换挡控制流程图
2 模糊RBF神经网络PID控制器
由上述分析可知,按照式(9)调节电机输出转矩,最终应能实现转速转矩双同步,但这只是必要条件。实际上,由于电机响应延时和不确定干扰的存在,如何让电机实时精确地跟踪目标转矩,并让转矩闭环控制具有一定的鲁棒性,是实现双同步换挡的关键。考虑到传统的PID控制因参数固定而导致控制效果不佳,本文中采用模糊径向基函数(radial basis function,RBF)神经网络来调节PID控制参数。这种自适应PID控制方法能使系统更快响应转矩命令,同时也具有较强的抗干扰能力,从而改善了转矩闭环控制的性能。
2.1 模糊RBF神经网络PID控制原理
人工神经网络具有超强的并行处理和自学习能力,多年来一直被广泛应用于各个领域。与传统的BP神经网络相比,RBF神经网络具有更简单的自学习算法、更快的收敛速度和可达到全局最优等优点[13],但其内部的推理过程对用户是不透明的。模糊控制可以利用已有的专家知识和经验,借助直观易懂的语言模型来实现推理过程,但由于缺少自适应能力而难以应用于需要精准控制的场合。RBF神经网络和模糊控制虽然在信息的表达、存储、获取和运用等方面存在显著差异,但在功能上却是等效的[14]。因此,根据优势互补原则,本文中设计了一种模糊RBF神经网络PID控制器,其原理如图3所示。电机转矩闭环控制系统以目标转矩值Tm_des为参考输入量,采用增量式PID控制器进行转矩跟踪。模糊RBF神经网络以转矩偏差e(k)及其变化率ec(k)的采样值作为输入,经过内部模糊运算和参数自学习,优化出一组合适的PID参数,使最终的系统输出误差最小。这样,PID控制就具有自适应性,进一步增强了转矩控制效果。

图3 模糊RBF神经网络PID控制原理图
2.2 模糊RBF神经网络的结构
模糊RBF神经网络由输入层、模糊层、推理层和输出层组成,其结构如图4所示。输入量e(k)和ec(k)都是精确的数值,须经模糊化处理。这里将输入量范围映射成5段模糊区间:e(k)=[NB,NS,ZO,PS,PB],ec(k)= [NB,NS,ZO,PS,PB],论域为[-3,3]。因此,模糊层有5个节点,每个节点代表一个模糊子集,推理层的节点数为5×5=25,输出层的3个节点分别输出PID的控制参数ki,kp,kd。

图4 模糊RBF神经网络结构
(1)输入层 此层传递系统输入信息x=[x1,x2]=[e(k),ec(k)]。 因此,其输出为

(2)模糊层 主要功能是将输入量进行模糊化处理,得到各个子区间的模糊量。采用高斯函数计算输入量对各个模糊子集的隶属度,并将其作为该层的输出:

式中:i=1,2;j=1,2,3,4,5;f2(i,j)表示第 i个输入量对第j个模糊子集的隶属度;cij和bij分别为模糊子区间的中心和宽度,它们决定了模糊子集的划分方式。
(3)推理层 该层总共有25个节点,每个节点代表一种模糊规则,实现解模糊功能。当采用模糊乘法规则时,将2个输入信号所对应的5个模糊量经过相互匹配达到激活强度,也即不同输入对应的模糊量两两相乘,并进行归一化处理,最终得到该层节点的输出值:

式中:j1,j2=1,2,3,4,5;n=1,2,…,25;n 的不同取值对应着不同的(j1,j2)组合。
(4)输出层 将模糊推理层的所有输出进行不同的线性组合就得到最终的输出。
记 F3=[f3(1),f3(2),…,f3(n)]T,F4=[kp,ki,kd]T,则最终的输出f4(m)为
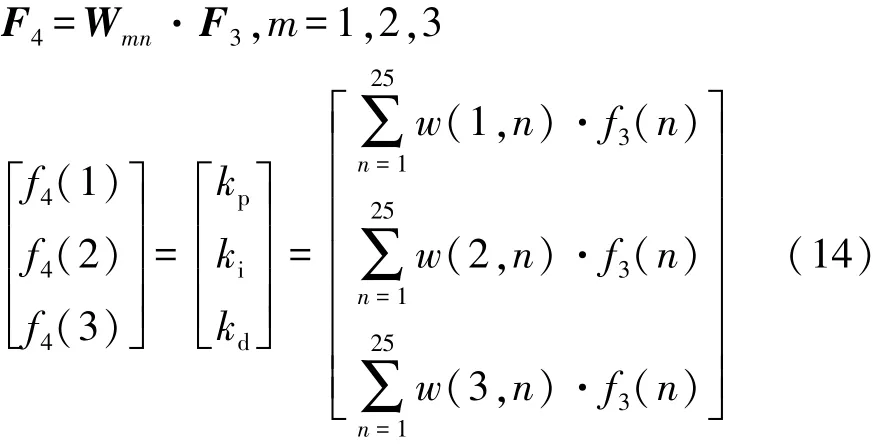
式中:Wmn为3×25的系数矩阵;w(m,n)为系数矩阵元素。
2.3 模糊RBF神经网络的学习算法
一般而言,模糊RBF神经网络需要学习的参数包括权重系数Wij(此处的i,j对应前面的m,n),高斯隶属度函数的均值cij和标准差bij。但考虑到cij和bij只是决定模糊子区间的划分方式,同时也为了简化学习算法,本文中假定模糊子集的划分固定不变,因此只对权重系数进行自学习。
优化目标是每次迭代后系统输出误差最小,因此定义性能指标函数为

式中:r(k)为控制系统的输入,即目标转矩Tm_des;y(k)为系统输出,即电机转矩Tm。
增量式PID控制算法如下:
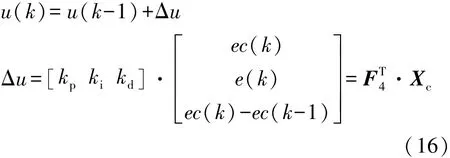
根据梯度下降法,权值系数矩阵Wij按以下方式调节:

式中:xc(i)为矩阵Xc的元素;η为学习速率;α为惯性系数,且 α>0,η<1;∂y/∂Δu 用前向差分的正负性来近似。利用上述学习算法,在每次迭代过程中,使性能指标函数E取得最优解。
2.4 仿真分析
在Matlab中进一步仿真验证模糊RBF神经网络PID控制的可行性和有效性。主要参数设置和初始化如表1所示。
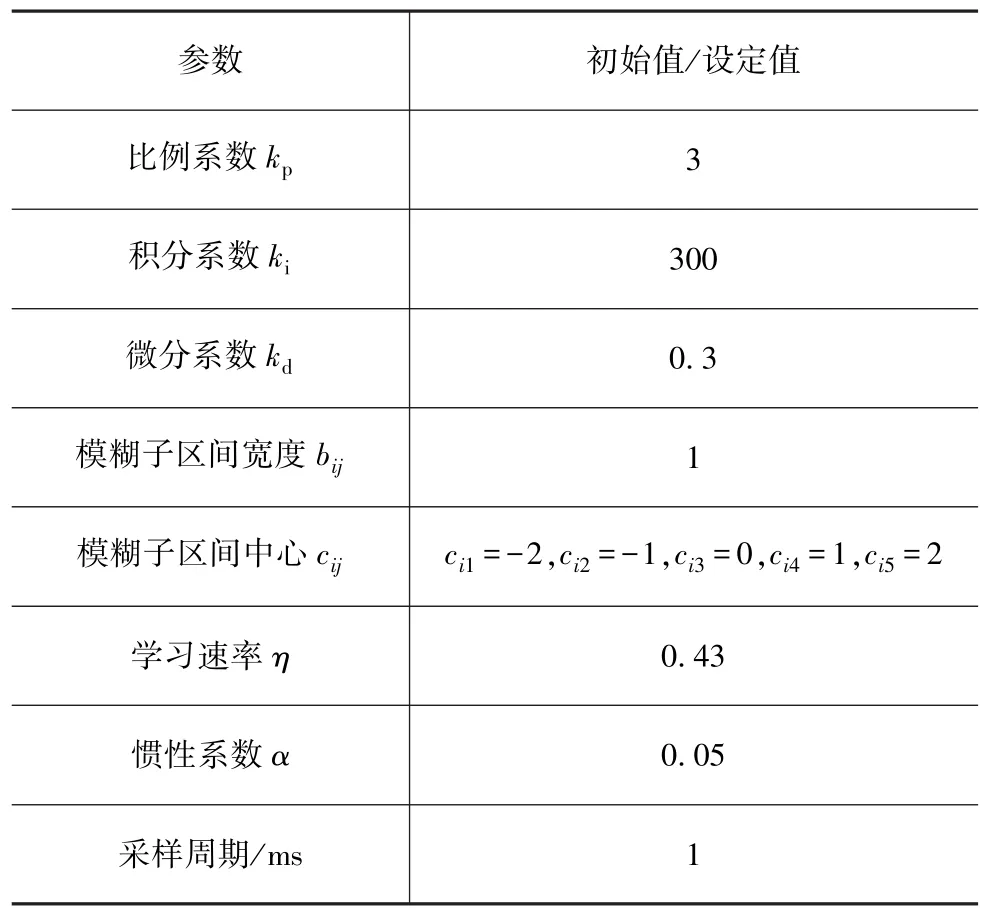
表1 模糊RBF神经网络参数初始化
图5为不同PID控制的单位阶跃响应。由图5可知,常规PID控制的阶跃响应为65ms左右,与电机的名义转矩响应时间70ms(由标定实验获得)比较接近。而模糊RBF神经网络PID控制的阶跃响应时间约为47ms,比常规PID控制缩短了28%,且没有超调;在施加10%的瞬态干扰之后能迅速恢复到稳态值,并未出现太大的偏离和波动。图6为PID参数自适应过程。由图6可知,在模糊RBF神经网络PID控制器响应目标输入的过程中,控制参数kp,ki,kd经过约35ms的自学习和自整定后逐渐稳定下来,并在系统达到稳态之后保持不变。因此,将模糊RBF神经网络PID控制应用于电机目标转矩的跟踪,能比常规的PID控制表现出更佳的快速性和鲁棒性。
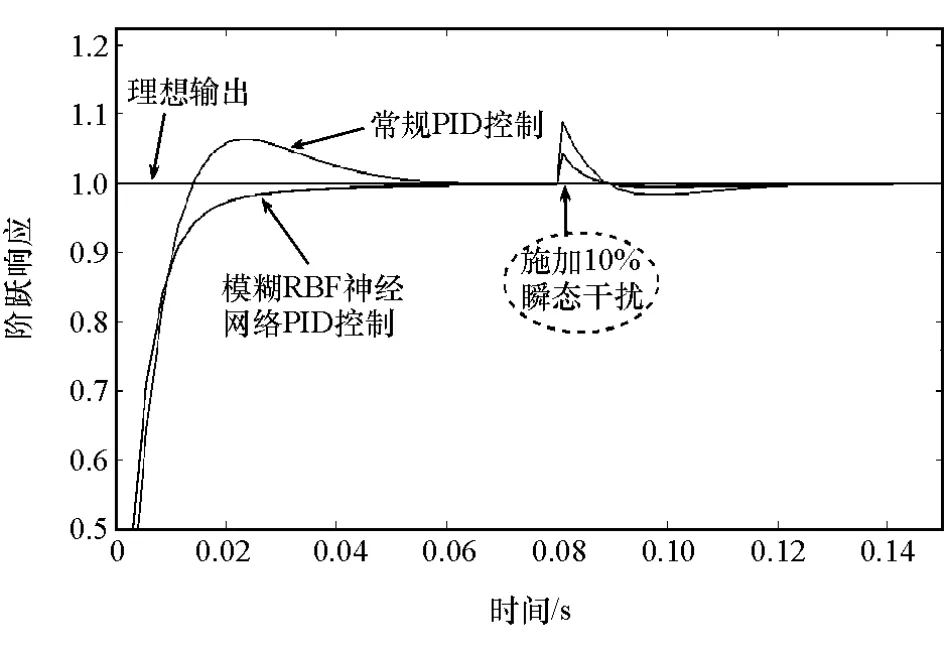
图5 不同PID控制的单位阶跃响应

图6 PID参数自适应过程
3 实验分析
为验证转速转矩双同步换挡控制的有效性,选择变速器输出端空载的工况,在单轴并联式混合动力AMT台架上(图7和图8)进行了转速转矩双同步换挡实验和传统换挡实验。其中,混合动力系统关键设备的参数如表2所示。
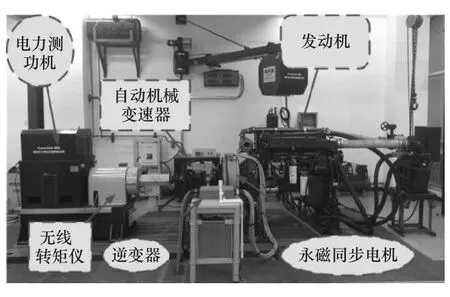
图7 单轴并联式混合动力AMT系统
图9 为传统换挡与转速转矩双同步换挡的4挡降3挡的台架对比实验结果。分析图9可知,传统换挡和转速转矩双同步换挡总的换挡时间分别为0.83和0.73s(参照图9(a)~图9(d)),双同步换挡时间缩短了0.1s;相对于传统换挡方式,转速转矩双同步换挡可同时从转速同步和转矩同步两个方面减小换挡冲击,改善换挡性能。其主要区别如下。

图8 混合动力AMT系统的上位机界面

表2 混合动力系统关键设备参数
(1)参照图9(a)、图9(b)、图9(g)和图9(h),在转速同步和挂挡阶段,传统换挡在挂挡时会有明显的残余同步速差,达120r/min左右,因此导致0.45m/s3的大冲击(等效到车轮上的纵向冲击度),严重损伤啮合套和接合齿圈;而转速转矩双同步换挡在挂挡时基本没有速差,实现了真正意义上的转速同步,因此只有0.1m/s3左右的轻微冲击。这主要是因为传统的换挡控制是采用从动端转速不变的假设,实际上在电机调到目标转速和挂挡的过程中,从动端在自身阻力作用下一直在减速,在转速同步初期设定的目标转速已不适用于实际挂挡时的情形。在实际挂挡时,传统换挡方法的啮合套和接合齿圈仍存在较大速差,导致挂挡冲击甚至挂挡失败;而转速转矩双同步换挡的目标转速是根据从动端的转速来实时调节的,在接合时就可保证不会有明显同步速差,同时还降低了转速调节量,因此能节省同步时间、降低挂挡冲击度。
(2)参照图9(a)、图9(b)、图9(e)和图9(f)传统换挡基于转速模式,电机会通过PID控制输出脉动转矩来跟踪并维持在目标转速附近(图9(e)),但在挂挡接合时会由于角加速度的不一致导致主动端对从动端产生突加负荷,进一步加大冲击度。而转速转矩双同步换挡是基于转矩模式的,电机输出转矩根据电机转速和目标转速的同步速差来不断迭代调整(图9(f)),并通过模糊RBF神经网络PID控制来实现转矩的实时跟踪。当电机输出转矩逐渐减小到零,达到与变速器输出端的空载情形一致时,即实现了转矩同步。因此,转速转矩双同步换挡在挂挡接合时同步器主从动端不仅转速同步,还因转矩同步而具有相同的角加速度,能显著减轻换挡冲击、提高换挡品质。

图9 传统换挡与转速转矩双同步换挡的4挡降3挡结果对比
鉴于篇幅所限,本文中只对比分析了空载工况下的换挡性能,但实际上在大负载、坡道换挡等工况下,传统换挡因同步器主从动端运动趋势的不一致所导致的挂挡冲击和挂挡失败现象更加频繁。所提出的转速转矩双同步换挡控制方法在很大程度上能减少甚至规避这些缺陷,从而带来更佳的换挡体验,具有显著的优越性。
4 结论
提出的转速转矩双同步换挡控制方法能有效解决混合动力汽车在大负载或坡道起步换挡时的换挡冲击和挂挡失败的问题,其创新点体现在:(1)考虑从动端的转速变化,采用电机转矩模式来实现转速转矩双同步;(2)设计一种模糊RBF神经网络PID控制器来实现转矩的精确跟踪。台架实验结果表明,与常规的换挡控制相比,该方法不仅可减少换挡时间,还能减轻换挡冲击,具有显著的优越性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年11期)2022-06-20
防爆电机(2022年2期)2022-04-26
兵器装备工程学报(2022年2期)2022-03-16
煤气与热力(2022年2期)2022-03-09
昆明医科大学学报(2021年12期)2021-12-30
北京航空航天大学学报(2021年4期)2021-11-24
防爆电机(2021年5期)2021-11-04
汽车实用技术(2019年9期)2019-05-15
电子制作(2019年24期)2019-02-23