基于贪心算法的自适应解列断面自动搜索方法(一)解列指标体系与算法设计
2018-10-11 02:51:28乔煌煌唐可翾杨银国
电力系统自动化 2018年19期
罗 钢, 乔煌煌, 沈 沉, 唐可翾, 钱 峰, 杨银国
(1. 广东电网有限责任公司电力调度控制中心, 广东省广州市 510600; 2. 广东电网有限责任公司电力调度控制中心大电网安全稳定分析与控制实验室, 广东省广州市 510600; 3. 清华大学电机工程与应用电子技术系, 北京市100084)
0 引言
随着直流输电的发展,国内除了华北、华中电网外,其他电网均已通过直流输电系统实现互联。由于交直流电网结构复杂,在发生严重故障的情况下,有可能发生连锁故障进而引发大停电。解列控制作为电力系统第三道防线的重要措施,通过将电网解列成两个或两个以上稳定运行的孤岛,能够有效避免系统崩溃,防止大停电事故的发生[2-4]。
解列断面的搜索是解列控制研究的难点,其本质是满足一定约束条件(如同调约束、功率平衡约束等)的网络分割技术。理论上电力系统稳定运行的基本约束如潮流约束、频率稳定约束、暂态功角稳定约束、电压稳定约束以及换流站多馈入短路比约束都应该考虑,只有这样才能保证解列后孤岛能在较小的控制代价下稳定运行。但是由于实际电网规模庞大、结构复杂,考虑各约束条件的代价各不相同,为了降低计算的复杂度,加快计算速度,现有的解列断面求解方法往往只考虑其中极少的几个约束条件。文献[6-8]提出了基于有序二元决策图的三阶段法,此方法主要考虑了同调约束、功率平衡约束以及孤岛静态稳定约束。文献[9-12]提出了基于慢同调理论的解列控制方法,此方法主要考虑慢同调约束、弱连接线路约束以及功率平衡约束。文献[13]-17]等智能优化算法将解列问题转变为单目标、多约束条件的优化问题,其目标函数一般为不平衡功率或者有功潮流冲击最小,约束条件有同调约束、连通性约束以及系统潮流约束等。除了考虑的约束较少外,现有算法在断面搜索前都需要对网络进行人工化简,以降低系统规模。通过减少约束和化简网络两个操作,现有算法才可以将解列问题用优化方法或者是搜索加校验的方法进行求解。
然而,系统实际运行工况复杂,需要考虑的约束众多。例如:为了保证解列后含直流落点孤岛的稳定运行,甚至在解列控制失败后能够便于回复,还需要考虑更多的约束条件,比如换流站多馈入短路比是否满足要求,解列断面是否存在电磁环网,孤岛是否存在黑启动电源等。同时,实际调度数据规模大,现有的方法都无法在不对系统拓扑和在线运行状态进行等值化简的情况下直接求解解列断面。因此,为了推动自适应解列控制走向应用,迫切需要提出一种新的自适应解列断面搜索方法,在考虑更多的系统运行约束的同时,可以直接利用系统在线数据,减少系统化简等人工干预。
本文作为系列文章的第一篇,提出了一套适用于交直流电网解列的指标体系,并且设计了一种能够兼顾各约束条件的解列断面自动搜索方法。本文的研究是希望将交直流电网自适应解列的断面搜索方法向在线应用的方向推动,具体体现在:①尽量考虑实际运行中可能出现的情况,比如存在电磁环网;②设计算法时要考虑算法本身可包含尽量多的运行约束,如含直流落点的受端交流电网短路比要求;③以在线运行数据为基础开始计算,不对网络进行专门的简化处理,一旦计算所需数据完整,则算法可以给出相应的解列断面,计算过程不再需要人为干预;④尽量利用系统在线运行信息进行分析,降低系统故障后的计算量,比如在交直流电网发生严重故障之前,根据系统稳态实时运行数据,对发电机进行慢同调分群,找到系统的弱连接,并考虑其他约束条件,给出潜在的解列断面,上述过程可在线完成。当系统发生严重故障时,根据具体的失稳模式可快速确定最终的解列断面。
考虑到解列断面的搜索可以看成是一个多目标的优化问题,而多目标优化问题并没有唯一的最优解,且多目标优化问题的求解难度大,并不适用于解列问题。因此,本文将解列需要考虑的各类约束条件的综合满足程度作为最终评判解列断面优劣的标准,追求具有一定局部最优性的可行解,以此为算法设计的指导思想提出了基于贪心算法的解列断面搜索方法。
系列文章第二篇,将给出详细的指标评分计算方法以及算例,算例中还将讨论指标权重变化对解列断面的影响。
1 交直流电网解列指标体系
本文提出的指标体系,尽量涵盖交直流电网稳定运行基本约束,同时这些约束具有易于数学描述的特点。指标体系一共包含9个指标,分别是发电机同调、弱连接线路、孤岛功率平衡、多馈入短路比、电磁环网、电气距离、存在黑启动机组、孤岛规模与存在静态工作点。
由于指标体系中约束条件较多,在解列断面搜索阶段,尽量避免给这些指标安排优先级。断面搜索方法也分为“搜索+校验”两部分。在解列断面搜索阶段,搜索方法同时考虑除静态工作点约束外的8个约束条件,在校验阶段,考虑静态工作点约束以及一部分选定约束条件。本小节将给出各指标的定义,对于熟知的约束条件,本文不做详细介绍,感兴趣的读者可以阅读参考文献。
1.1 发电机同调性
本文中,发电机同调性指的是发电机的慢同调特性。电力系统中慢同调有很多种定义方法,常见的是基于数学模型的模式不可观性定义[18]。文献[10,19]提出了发电机慢同调分群方法。为了保证解列后孤岛的同步运行,必须将异步机组分配到不同的孤岛上。
1.2 弱连接线路
系统在发生大扰动的情况下,内部的发电机群之间出现了失步振荡的现象,而振荡的中心落在少数的线路上面,这些线路就是弱连接线路[18]。文献[18]基于系统慢模式特征值对电力线路参数的灵敏度,提出了一种弱连接线路识别方法。理论上,在弱连接线路处解列更为合理。
需要说明的是,弱连接和同调性这两个约束,同调性是本质,弱连接是具体表现,两者之间具有一定的相关性,严格来说不能作为两个独立的约束条件。但是发电机同调约束只对电网中部分发电机节点起作用(还有一些发电机的同调特征并不显著,既可以划分到某一同调群,也可以划分到另一同调群),而弱连接约束涉及电网中所有的线路,两者可以相互补充,从而更好地隔离异步机群。因此,同时将弱连接和同调分群列为两个约束条件。
1.3 孤岛功率平衡
孤岛功率平衡的含义是,解列形成的孤岛内,发电量和负荷量要尽可能相等。保证孤岛内功率平衡可以避免过多的切机切负荷操作,也有利于解列后的系统恢复。
1.4 多馈入短路比
多馈入短路比的定义是换流站的短路容量与等值直流功率之比[20]。文献[20]给出了多馈入短路比的定义以及计算方法。对解列后具有直流落点的孤岛,多馈入短路比是评价孤岛对直流落点的支撑能力以及直流落点间相互影响关系的重要指标。多馈入短路比大的换流站,在电压稳定性、动态过电压、谐波谐振方面均表现更好[20],因此在交直流电网中,这一指标不容忽视。
1.5 电磁环网
电磁环网也称为高低压电磁环网,是指通过两端变压器磁回路的连接,使得两组不同电压等级的线路并联运行的现象。电磁环网中高压线路的断开导致潮流的转移很可能造成事故的进一步扩大。一般情况下,不适合在电磁环网处解列。
1.6 电气距离
电气距离常用来描述节点之间或者节点与系统之间联系的紧密程度。如果某些节点之间电气联系紧密,电气距离小,一般情况下应该将这些节点划分到同一个孤岛上。
文献[21]将节点i和j之间的电气距离定义为两点之间的端口等值阻抗Zij,equ。在i和j组成的二端口网络中,输入单位电流eij,用两点之间端口电压Uij除以电流eij,即可得到端口等值阻抗Zij,equ。
二端口等值阻抗可以用节点等值阻抗来表示:
Zij,equ=(Zii-Zij)-(Zij-Zjj)=
Zii+Zjj-2Zij
(1)
式中:Zii为节点i的等值自阻抗;Zjj为节点j的等值自阻抗;Zij为节点i和j间的等值互阻抗。
如果网络有Nt个节点,文献[21]将节点i的电气耦合连接度定义为:
(2)
式(2)表示了节点i与电网中其余节点的电气耦合的紧密程度,反映了节点i在整个电网中的电气重要程度。
1.7 存在黑启动机组
解列后的孤岛内应具有黑启动电源,万一发生孤岛全黑的情况,孤岛更容易恢复供电。
文献[22]提出的黑启动电源一般分为3类:①传统的黑启动机组,主要包括水电以及燃气轮机组;②事故后残存机组,具有快速切回(FCB)功能的机组属于这一类;③相邻系统的支援。在解列策略中,本文主要关心前两类电源的分配。
1.8 孤岛规模
本文用孤岛内的节点数量来表征孤岛的规模。解列后孤岛规模越大,越有利于恢复联网运行。相反,规模太小的孤岛往往不容易存活,因此事先设定一个规模阈值。
1.9 静态工作点
静态工作点约束一般指的是解列后的孤岛存在潮流收敛的解。相比于孤岛功率平衡,这一要求更为严格。两者的差别是,孤岛功率平衡侧重于有功平衡,而存在静态工作点不仅要求有功平衡,更强调无功平衡并兼顾线路传送容量约束。考查孤岛是否存在静态工作点,一般在解列断面搜索完成后进行。
2 算法设计
2.1 基于贪心算法的解列断面搜索方法
2.1.1贪心算法简介
贪心算法的核心思想是从某个问题的初始解出发,根据一定的优化标准,确定前进的方向,确保每一步都是问题的局部最优解,一直到把所有的数据都搜索完或者不能再加入算法为止。这是一种每一步都采取局部最优策略的算法,但是并不能保证最终的结果是全局最优解[23]。
解列断面的确定过程也可以看成是孤岛的生成过程。为此,可以从某一个初始节点出发,逐步生成孤岛。当电网中所有的节点均纳入某一个孤岛中时,孤岛之间的边界即是解列断面。某一个节点具体应该纳入哪个孤岛,可以根据该节点纳入不同孤岛时对各种运行约束的满足情况而定。
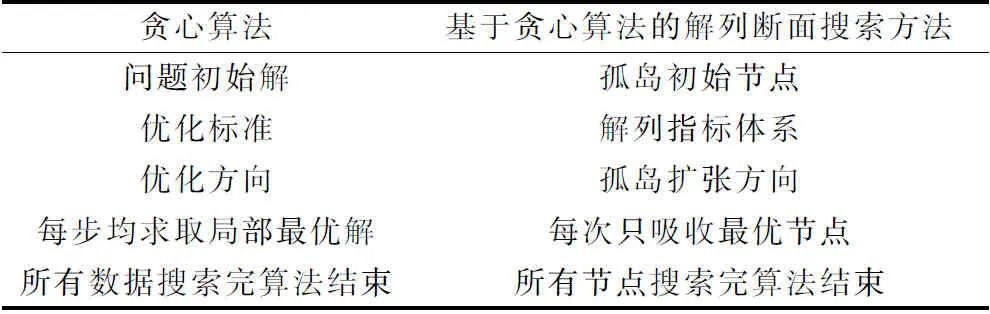
贪心算法与基于贪心算法的解列断面搜索方法比较如表1所示。
2.1.2贪心算法应用于解列断面自动搜索
文献[10]采用经典的电力系统模型,通过对系统进行线性化处理,并进行模式模态分析,得到发电机慢同调分群结果。假设一共分为r个慢同调群,对慢同调群i的发电机,按照出力从大到小排列,得到发电机集合为{xi1,xi2,…,xinGi},其中nGi表示慢同调群i的发电机数。由于篇幅的限制,具体的分群过程不再介绍。
分群结束后,可人工指定解列孤岛的数量g(2≤g≤r),也可以取孤岛数量与慢同调机群数相等(g=r),各孤岛编号为{G1,G2,…,Gg}。每个孤岛只对应一个慢同调群,并选取其中出力最大的一台发电机作为孤岛的初始节点,得到孤岛初始节点集合{x11,x21,…,xg1}。
接着,各孤岛开始搜索各自的一级相连节点(孤岛一级相连节点指的是孤岛外通过一条线路便可以和孤岛内部相连的节点)。每次搜索,g个孤岛中有且只有一个孤岛可以增加一个节点,这个节点称为每轮搜索最优节点,其确定方法如下。

图1 各孤岛内部节点、一级相连节点示意图Fig.1 Schematic diagram of inner nodes and first-level-connected nodes in each island
假设整个电网的节点数为N,除初始节点外剩余节点数为N-g,进行N-g次搜索后,整个电网划分为g个孤岛,本次搜索结束,此时各孤岛之间的联络线就是解列断面。
需要说明的是,贪心算法的本质决定了节点纳入的顺序,以及各孤岛初始节点的选择必将对搜索结果产生影响。但是,本文研究旨在实现解列断面的在线搜索,考虑到解列问题的复杂性,寻求的是可行的解列断面而非最优的解列断面。本文采用贪心算法求解的是满足约束条件的可行解列断面,并不是全局最优的解列断面。
2.1.3解列策略校验
得到解列断面后,需要对解列策略进行校验。这一阶段考虑除弱连接线路、电气距离外的7个指标:发电机同调、孤岛功率平衡、多馈入短路比、电磁环网、存在黑启动机组、孤岛规模和存在静态工作点。各指标的取值范围一般由电网运行部门事先给定,作为边界条件输入算法中,不同电网或者同一电网不同运行状态,取值不一定相同。例如,可做如下规定。
1)发电机同调:同一慢同调群机组分配到同一个孤岛上。
2)孤岛功率平衡:每个孤岛不平衡功率小于5%。
3)多馈入短路比:每个直流落点多馈入短路比大于3。
4)电磁环网:无电磁环网解环。
5)存在黑启动机组:黑启动电源合理分配到各孤岛中。
6)孤岛规模:孤岛节点数大于系统总节点数的5%。
7)每个孤岛均存在静态工作点。
如果各指标满足要求,则确定为最终解列断面,可以进一步确定解列装置动作时间时序,采取解列操作。如果某些指标不满足,则可以修改综合评分过程中指标的权重或者修改初始孤岛数量g,重新进行搜索。本方法中,指标权重以及孤岛数量自动调整方法如下。
初始时,各指标权重均为1。解列策略校验后,如果某一指标不满足约束范围,则该指标的权重增加0.2,重新搜索,再次校验,仍不满足约束,增加相同量继续搜索,重复以上过程。权重最大值为3,也就是调整次数上限为10次。多个指标不满足,每次只调整其中一个指标的权重,其余指标权重不变。按上述方法操作,逐个调整。对于只在解列策略校验过程中考虑而解列断面搜索过程中不考虑的指标,跳过这一环节。
指标权重调整后,重新搜索解列断面,如果仍然存在指标不满足的情况,则修改初始孤岛数量g。初始时,g=r,将g从r开始往下减小,每次减1。g减小后,各指标权重又恢复默认值,重新搜索解列断面。如果存在指标不满足的情况,按照自动调整权重的方法重新调整这些指标的权重。
以上两个过程交替进行。g的下限值为2,如果达到下限值并重新调整权重后,不管解列断面满不满足约束条件,程序均退出运行。此时,结合电网的实际情况对某一个或几个约束条件适当放宽,在已有的搜索结果中筛选出满足放宽后的约束条件的解列断面,整个搜索过程结束。
各指标的权重设计将在系列文章的第二篇中介绍。
2.2 算法流程
综上,基于贪心算法的解列断面搜索方法的算法流程如下。
步骤1:建立系统数学模型,对系统发电机进行慢同调分群,假设一共分为r个慢同调群。确定解列孤岛数量g(2≤g≤r)以及每个孤岛对应的慢同调群,确定每个孤岛的初始节点。初始时,选择g=r,如果解列策略不理想,解列孤岛数减1,将g从r开始往下减小。
步骤2:统计整个电网节点数N,则搜索次数为N-g次,各指标权重初值均取1。具体搜索流程如下:首先,得到所有孤岛的一级相连节点,接着按照指标体系对所有的一级相连节点打分,选取得分最高的一个节点,作为本次搜索的最优节点加入对应的孤岛中。每次搜索,g个孤岛中有且只有一个孤岛可以增加一个节点。重复以上过程直到搜索结束,此时各孤岛之间的联络线就是解列断面。
步骤3:得到解列断面后,按照指标取值范围对解列策略进行校验。如果各指标满足要求,则确定为最终解列断面;如果某些指标不满足,则可以修改综合评分函数中指标的权重或者调整初始孤岛数量g,重新进行搜索,直到得到满足约束条件的解列断面或者达到搜索次数的上限。达到搜索次数上限时,结合电网的实际情况对某一个或几个约束条件适当放宽,在已有的搜索结果中筛选出满足放宽后的约束条件的解列断面,整个搜索过程结束。
算法流程图如图2所示。
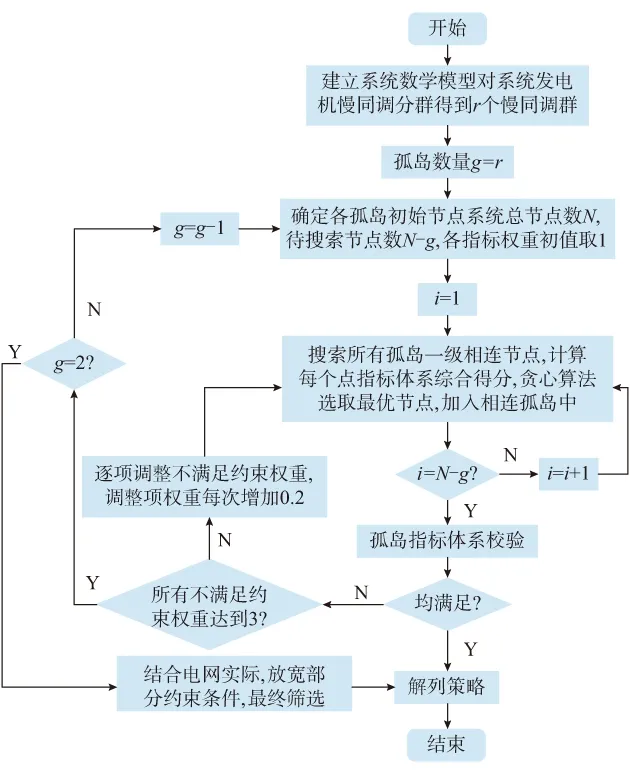
图2 算法流程图Fig.2 Flow chart of the algorithm
3 结语
本文提出了交直流电网解列指标体系,一共包含9个指标,分别是发电机同调性、弱连接线路、孤岛功率平衡、多馈入短路比、电磁环网、电气距离、存在黑启动机组、孤岛规模与静态工作点,给出了每个指标的定义。提出了基于贪心算法的解列断面搜索方法,给出了算法的思路、详细的计算流程。
在系列文章第二篇中,将给出详细的指标评分方法以及算例,并将讨论指标权重变化对解列断面的影响。
本文研究得到广东电网有限责任公司科技项目(K-GD2014-198)的资助,谨此致谢!
猜你喜欢
电机与控制应用(2022年4期)2022-06-27 06:29:28
少年博览·小学高年级(2022年6期)2022-05-30 20:26:20
新世纪智能(语文备考)(2020年9期)2020-12-31 09:24:02
Frontiers of Nursing(2018年1期)2018-05-21 02:34:14
新高考(英语进阶)(2018年1期)2018-04-18 13:59:51
创新作文(小学版)(2017年33期)2017-04-04 02:02:14
高中生·天天向上(2016年6期)2016-11-22 09:39:34
作文大王·笑话大王(2016年6期)2016-06-22 11:33:08
作文大王·笑话大王(2016年4期)2016-04-27 11:40:20
作文大王·笑话大王(2016年1期)2016-02-24 11:25:51