
基于人类视觉机制和粒子滤波的红外小目标跟踪
2018-10-11 01:13朱志宇
江苏科技大学学报(自然科学版) 2018年4期
王 瑞, 朱志宇, 张 冰
(江苏科技大学 电子信息学院, 镇江 212003)
目前基于粒子滤波的红外目标跟踪方法主要分为以下几种:① 基于目标表观模型的粒子滤波跟踪方法[1].红外弱小目标的像素灰度分布会随时间发生变化,目标灰度特征很难有效描述弱小目标;② 基于区域匹配的粒子滤波跟踪方法.通过计算目标模板与候选目标的相似程度来确定当前图像中目标的具体位置,形成对目标的连续跟踪[2-3];③ 基于粒子滤波的多目标跟踪方法在红外多目标跟踪场景下,常规办法是将传统的概率数据互联方法和粒子滤波结合,实现红外多目标的跟踪[4-5];或者对粒子的重采样结果进行聚类分析,获得相应目标的粒子子群集合以及相应的不动点[6-7].
然而传统粒子滤波方法跟踪实时性差、且在目标弱小、背景复杂情况下跟踪鲁棒性差.人类视觉系统(human visual system, HVS)分为选择性注意机制、对比机制及学习与记忆机制[8],具有高效率和鲁棒性等优势.近年来,将HVS应用在视觉目标跟踪领域的研究逐渐兴起,目前较为广泛地集中于视觉注意机制的应用,比如利用检测视觉注意力焦点区域的方法建立具有人类视觉智能的目标跟踪框架[9].文献[10-11]应用微分高斯滤波器(differential gaussian filter,DOG)和拉普拉斯——高斯滤波器(Laplacian of Gaussian filter, LOG)来检测出红外图像中的目标兴趣点,LOG很难计算,而DOG是LOG的近似.文献[12]给出了一种从红外图像中检测出行人的 ROI 方法.文献[13]应用 DK(derived kernel)模型来模拟人眼的对比机制,但是给出的方法需要逐个像素计算,运算量很大.
文中提出一种基于人类视觉系统对比机制和粒子滤波的红外小目标跟踪方法,模拟人类视觉系统对比机制,建立了基于局部视觉对比度的“九宫格”式目标跟踪模版,实现了对复杂背景下红外小目标的鲁棒跟踪.
1 基于人类视觉对比机制的粒子滤波红外目标跟踪方法
1.1 局部视觉对比度目标特征提取及目标模版建立
轮廓是物体的一个重要特征,轮廓提取的好坏对后续的目标定位、特征提取、识别和分类有着重要的影响[14].而真实的IR弱小目标通常占据一小块区域(少于9×9像素),难以准确获得目标轮廓,准确提取目标区域成为更实用、更有效的办法.采用边长为6个像素的滑动窗口按照从上到下、从左到右的顺序扫描红外图像,可得到一系列子图像区域.采用每个子图像的平均灰度作为其参数.在子图像平均灰度计算中,高亮噪声会因其所占像素少而被周围背景所淹没从而达到抑制背景噪声的效果.
定义子图像的平均灰度为:
(1)
式中:m(sblk(s,t))为子图像sblk(s,t)的平均灰度值;a×b为该子图像块的尺寸;I(pixel(i,j))为像素pixel(i,j)的灰度.并将所有子图像排成新的阵列M(i,j).假设某子图像块的最大灰度值为Lmax,mi(i=1,2,…,8)是在子图像阵列中与平均灰度为m0的子图像块相邻的8个子图的平均灰度,如图1.

图1 子图像局部阵列图Fig.1 Local array graph of sub image
如果该图像块是目标区域,则因此有:
Lmax>max(mi(i=1,2,…,8))
(2)
反之,对于背景区域有:
Lmax≤max(mi(i=1,2,…,8))
(3)
定义子图像局部对比为:
(4)
经过LCM运算后,目标被增强,背景被抑制.对阵列M(i,j)中的每一个元素计算与之对应的LCM,得到目标图像的显著图.
阈值法是图像分割的一种重要方法,可有效缩短计算时间、突出边缘特征、提高阈值自动选择的准确性和鲁棒性[15].将LCM>Th(Th为阈值)的子图像区域视作目标区域,确定目标的中心位置是精确检测小目标的最后一步,也是关键一步.目标区域中心(ti,tj)可由下式确定:
(5)
式中:I(pixel(i,j))为像素pixel(i,j)的灰度.以目标中心为目标检测框中心,扫描窗口尺寸为检测框大小,获得最终目标区域检测结果.
提取目标区域以及其邻域的8个子区域的“九宫格”式视觉对比度显著图,定义目标区域和其邻域8个子空间的“九宫格”式局部对比度为目标特征,获得方式如图2.

图2 目标特征提取Fig.2 Target feature extraction
在初始帧检测中,应用上述检测方法,可以锁定目标中心的初始位置为X0=[x0,y0]T,从而锁定目标区域.由以目标区域和其邻域8个子区域为中心的“九宫格”区域局部视觉对比度显著图构成特征空间,特征值(显著图的分格(bin))的个数为m个.用目标特征空间的概率密度函数表示目标的参考模型,采用m级局部对比度显著图作为概率密度函数的估计,即目标模型:
(6)
式中:qu为目标模版的特征向量,显著图分格个数为m.
1.2 粒子滤波跟踪算法
(2) 建立系统状态模型:
Xk=Xk+1+Dk+Bvk
(7)

建立观测模型,对可能存在目标的候选区域中的每个特征值进行计算,得到候选模型:
(8)
设{xi}u=1,2,…,n是目标模型的归一化像素坐标,目标模版中心位置为x0,选择一个核函数,对目标模版区域的像素设置权值,位置与目标模版中心的距离越近,权值越大.目标外围的像素可能被遮挡或受到背景影响,对目标模版像素进行加权后可以增加密度估计的鲁棒性,提高目标跟踪能力.
目标模版的核函数直方图定义为:
(9)
在第k帧中,计算第i个粒子所在位置的目标特征向量:
(10)
用Bhattacharyya系数度量目标模版与候选模型的相似程度:
(11)
在当前帧中不同的候选区域计算得到的候选模型,使得Bhattacharyya系数最大的候选区域即为本帧中的目标位置.区域距离为:
(12)
观测模型的似然函数为:
(13)
(3) 根据显著性图似然函数计算粒子权值:
(14)
目标状态估计.通过估计运动目标的状态参数和粒子状态参数的加权来估计目标状态:
(15)
对当前帧的跟踪到此已经完成,运动目标的状态参数和粒子状态参数的加权求和后的状态参数即为当前帧的目标状态.
(4) 重采样:
① 计算粒子的概率累加和,统计得到具有较大权值的粒子;

③ 标准化重采样后的粒子权值.
2 粒子滤波目标跟踪实验结果分析
2.1 局部视觉对比度显著图
计算初始帧局部视觉对比度,得到显著图结果如图3.图3(a)是原始红外小目标图像,(b)、(c)分别是灰度特征显著图和局部视觉对比度显著图,对比可以看出,弱小目标区域灰度,在视觉对比度算法处理后明显增强,灰度值由150增加到近200并且向目标中心收敛,同时,图3(b)中右下角毛刺噪声被周围背景所淹没,灰度值成倍骤降.
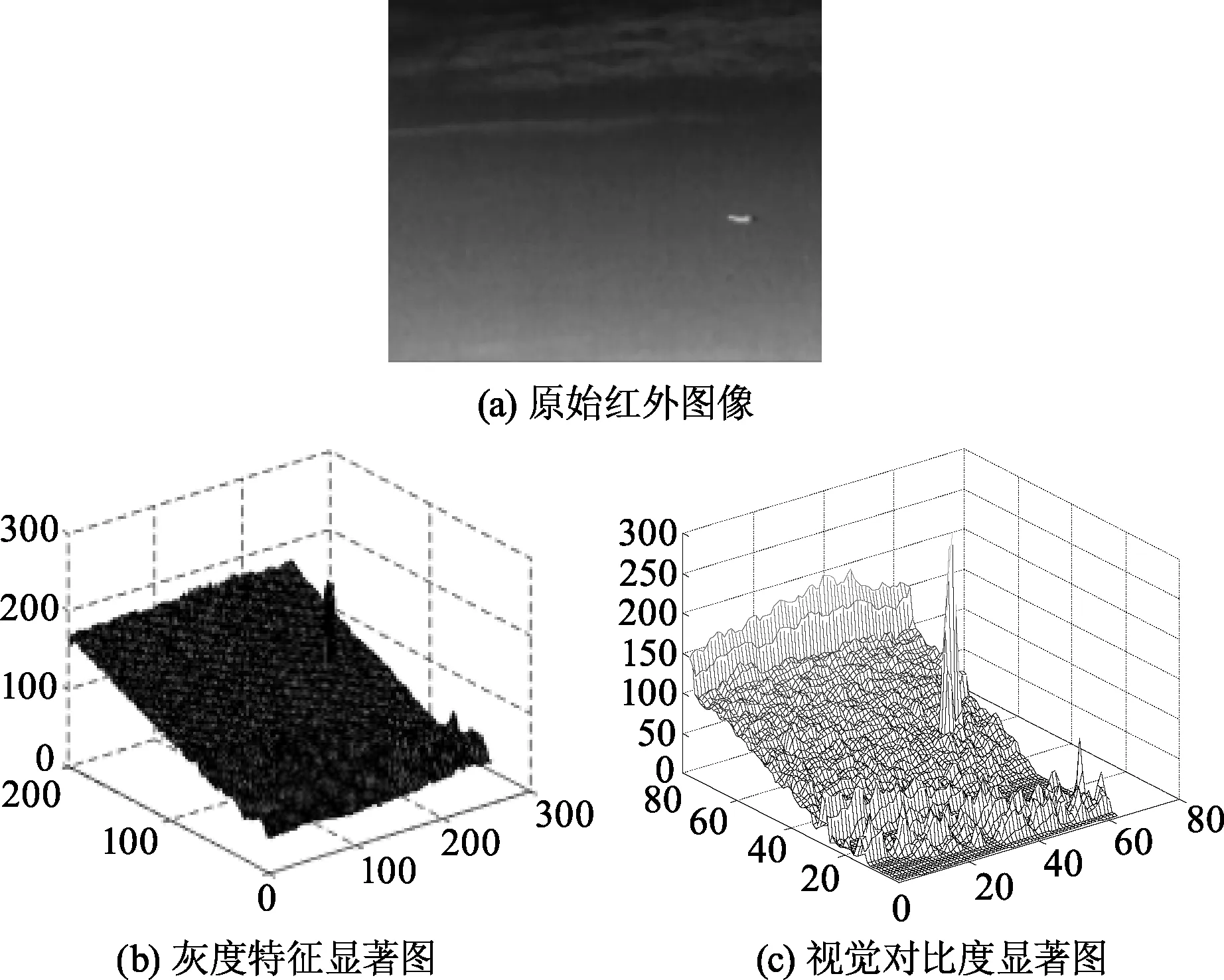
图3 局部视觉对比度显著图结果对比Fig.3 Comparison of the result of local visual contrast saliency map
2.2 基于局部视觉对比度和粒子滤波算法的红外小目标跟踪结果
在跟踪的过程中,飞机运动轨迹不定,瞬时加速度不均衡.目标较小,图像特征单一,信噪比低,为稳健跟踪增加了难度.通过建立“九宫格”式目标模版得到的目标轮廓使得跟踪结果比较准确.红外小目标跟踪结果如图4.

图4 红外目标跟踪结果Fig.4 Infrared target tracking results
表1给出了图4中目标的相关参数.红外图像常用局部信噪比LSNR[16]来衡量图像质量,LSNR的数值越小代表图像质量越差、跟踪难度越大.计算公式如下:
(16)
式中:μT为目标区域的平均灰度值,μG为全局图像的平均灰度值,σL为目标区域的标准差.

表1 图4中目标相关参数Table 1 Related parameters of targets in figure 4
3 与传统粒子滤波方法的对比
传统粒子滤波红外目标跟踪方法是以序列图像灰度显著图为目标特征,以矩形区域为目标模板区域,分别使用传统粒子滤波红外目标跟踪方法和文中提出的粒子滤波方法对同一序列图像进行目标跟踪.实验对比结果如图5.

图5 两种粒子滤波跟踪方法结果对比Fig.5 Comparison of the results of two particle filter tracking methods
图5(a)和图5(c)分别为使用传统粒子滤波跟踪方法得到的红外图像序列第8帧和第9帧的跟踪结果.图5(b)和图5(d)分别为使用文中粒子滤波跟踪方法得到的红外图像序列第8帧和第9帧的跟踪结果.目标以较大的瞬时加速度从第8帧位置移动至第9帧所在位置,由于目标区域尺寸非常小,接近机身长度的位移就足以给精确跟踪造成很大的困难.传统方法目标模板区域局限于目标区域,目标特征局限于图像的灰度特征,因而,当目标在相邻图像中的位移较大时,传统方法会由于目标模板信息单薄、缺少目标周边信息而导致目标丢失.基于视觉对比机制的粒子滤波跟踪方法以视觉对比度信息为目标特征,不仅包含了目标灰度信息还能体现目标和周围背景的差异,“九宫格”式目标模板区域的划定确保了本方法在目标瞬时位移较大情况下跟踪的鲁棒性,充分模拟了人类视觉系统对比机制在目标跟踪过程中发挥的作用.
4 结论
针对红外小目标图像信噪比低,背景复杂的特点,提出基于人类视觉系统对比机制和粒子滤波的红外小目标跟踪方法.根据实验结果得出结论:
(1) 通过计算图像局部视觉对比度获得显著图,能够在增强目标的同时,抑制背景噪声.
(2) 以局部视觉对比度显著图为粒子滤波跟踪的目标特征,通过建立“九宫格”式局部视觉对比度目标跟踪模版,将传统粒子滤波红外目标跟踪方法和文中提出的粒子滤波跟踪方法进行对比,证实所提出的“九宫格”式目标模板粒子滤波跟踪方法能够在目标瞬时加速度较大情况下提高跟踪的准确性.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
天津医科大学学报(2021年1期)2021-01-26
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
自动化学报(2017年5期)2017-05-14
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
