
欠驱动水下无人航行器航迹跟踪滑模控制系统设计
2018-09-29 03:07余红英
实验室研究与探索 2018年8期
张 艺, 余红英, 刘 琛
(中北大学 电气与控制工程学院, 太原 030051)
0 引 言
随着科学技术的发展,欠驱动UUV广泛应用于汇集海战场情报和海底区域作业中,其具备搜集海上水文、气象信息和辅助通信的使命。轨迹跟踪在UUV作业中也扮演着无可取代的作用。由于UUV具有的动力学复杂、输入输出非线性化、极易不稳定和欠驱动的特点,使得其在水下作业时极易受到外界复杂水文环境的影响,很难获得欠驱动UUV精准的动力学模型,因此进行欠驱动UUV航迹跟踪控制系统的设计十分必要[1-2]。
目前,关于UUV航迹跟踪控制已经有很多线性和非线性的系统控制策略和参数辨识方案,如自适应控制、智能PID、反演、H∞、模糊逻辑等控制方法,而其中航迹滑模跟踪控制可以高效抑制由于参数改变和外部扰动造成的不确定性影响,使系统实现对UUV三维轨迹的高精度跟踪,该控制器设计也适用于控制UUV非线性系统。
“抖振”多出现于滑模控制系统,其中的不连续项即使引入边界消抖函数也并不能完全消除抖振,甚至会产生较大的稳态误差。为了实现UUV高精度轨迹跟踪,需要引入自适应算法来补偿扰动项的影响。自适应欠驱动UUV轨迹跟踪滑模控制系统在外环系统中,采用虚拟滑模制导律控制输入,产生角度指令并传递给内环系统,并对其负载和外界扰动进行自适应估计。为了跟踪内环系统中间指令信号,在不需要惯性矩阵模型确切信息的情况下,设计滑模控制器,达到内环系统的稳定。从而使得UUV系统滑模面上的动态跟踪误差在某一时刻收敛到稳态,进而满足系统既能稳定工作又能精确跟踪其期望航迹的目标。
本文针对欠驱动UUV与外界复杂水文环境的交互面临的航行体水平面航迹跟踪的特殊问题,依据欠驱动UUV空间运动学模型,提出了一种自适应UUV航迹跟踪滑模控制系统。仿真结果表明,该系统能够有效地对欠驱动UUV进行精确航迹跟踪控制。
1 UUV简化水平面运动学模型
UUV是个完整六自由度动力学模型,欠驱动UUV在深海作业时,其利用主推器提供纵向推力,方向舵进行航向控制,其控制维数少于系统维数,当UUV巡航速度较高时,水平推进器对质量载体的作用被削弱,尤其在高速时系统会表现出欠驱动特征[3]。因此,进行欠驱动UUV空间六自由度的运动学模型和动力学模型的推演为本文航迹滑模跟踪控制器设计奠定了必要的理论基础。由UUV的运动坐标系推导出UUV的空间运动学和动力学模型,进而得到UUV水平面重心运动方程组(见图1)。

图1 参考系下的UUV运动
结合UUV载体的结构特性,可得出UUV水平面运动模型的路径跟踪简化运动方程。设欠驱动UUV浮心在运动坐标系的位置为(x,y,z),θ、φ、β分别代表UUV运动时的俯仰角、偏航角、滚转角,从而可得欠驱动UUV的空间动力学模型,
(1)
UUV在航行中的速度信息为绝对速度,针对航行体横摇和纵摇对系统的作用,可得到欠驱动UUV的空间运动学模型为:
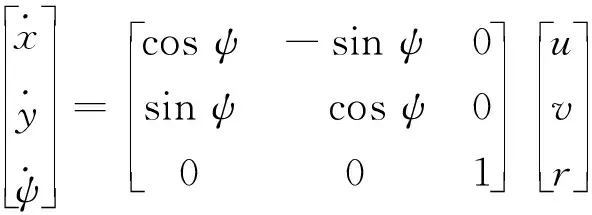
(2)
式中:(x,y,ψ)表示欠驱动 UUV 的质心在固定坐标系下的位置信息;(u,v,r)代表UUV的速度信息。
结合UUV空间动力学和运动学模型,可以得到描述UUV的水平面重心运动方程组,进一步可推导出UUV的空间重心运动方程:
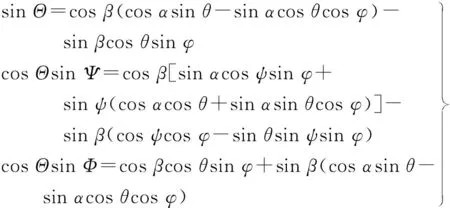
(3)
UUV的动力学模型和运动学模型表明,欠驱动UUV具有输入输出非线性,由于外界水文环境的扰动,导致方程参数在一定程度上出现偏差,从而影响UUV的水下航迹。
2 UUV控制系统设计
为解决由于非线性等因素导致的UUV航行及跟踪的问题,设计了UUV的控制系统,包括指令发生器、核心控制电路、供电模块、通信模块及桥接芯片等部分。在系统尾翼处通过直流无刷电动机对UUV控制系统的尾部舵机(水平舵和垂直舵)进行控制,使用编码器对舵机的航行角度进行反馈[4-6]。
传统的UUV控制系统由于无法兼顾系统动态性能而具有一定缺陷,根据欠驱动UUV水下航迹特点和系统控制要求,进行跟踪控制系统的设计。该控制系统由两部分组成:① 以位置跟踪误差为输入的外环控制系统(位置跟踪控制器);② 以姿态跟踪误差为输入的内环控制系统(姿态控制器)。控制系统结构示意图如图2所示。
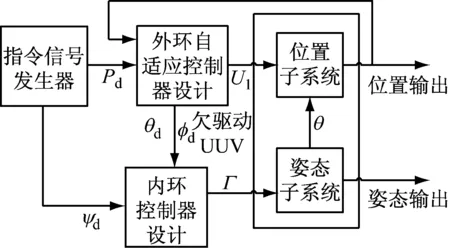
图2 UUV闭环系统结构图
上述闭环系统属于由内外环构成的控制系统,需要采用双环控制方法设计控制律[10]。位置子系统为外环,姿态子系统为内环,外环产生2个中间指令信号并传递给内环子系统,内环则通过内环滑模控制律实现对这两个中间指令信号的快速跟踪。
2.1 外环控制器设计
假设目标跟踪误差的相对位置为Pd,则规定跟踪误差值为eP=P-Pd,定义滑模函数为:
(4)
为保证对目标相对位置信号的准确跟踪,从而达到UUV航迹实时跟踪的目的,设计外环控制系统虚拟控制律UP为:
设计自适应律为
(7)

(8)
从而:

(9)


(10)
式中,
(11)

(12)
式中:φd为滚转角度指令信号;θd为俯仰角度指令信号。
需要说明的是,由于UUV具有欠驱动特征,独立控制变量个数小于系统自由度个数,不可能对全部自由度都进行跟踪[13]。设计可行的控制策略:跟踪航迹和偏航角,也就是位置P和偏航角ψd,同时使滚转角和俯仰角保持稳定有界。因此中间指令信号θd、φd并不是参考信号,而是为了跟踪参考位置信号,由虚拟控制输入生成的姿态子系统的指令信号。
上述外环系统即位置跟踪控制系统,外环控制器产生角度指令θd和φd,并传递给内环系统,外环产生的误差通过内环控制消除。
2.2 内环控制器设计
内环控制器即姿态控制系统,通过内环控制律实现姿态控制,并实现对外环所产生的角度指令θd和φd的跟踪。

σ2=Θ-Θr=Θe+λ2Θe,λ2>0
(13)
设计姿态控制器为
(14)
式中,η2>D1,c2>0。
选取李雅普诺夫函数,
(15)
则
(16)
内环控制子系统指数稳定,即Θe指数收敛。
针对整个闭环系统,取
V=V1+V2
(17)
可得:
(18)
内环控制器的动态性能即姿态角度跟踪误差(尤其是初始角度误差)会影响外环的稳定性,从而会影响整个闭环控制系统的稳定性。为了实现收敛速度快的内环滑模控制,工程上一般采用内环收敛速度大于外环收敛速度的方法,来保证闭环系统的稳定性[15]。在本设计中,通过调整内环控制其增益系数,保证内环收敛速度大于外环收敛速度。
3 仿真结果与分析
为验证本文所设计的自适应滑模跟踪控制器在航迹跟踪方面的优势,采用Matlab/Simulink作为仿真平台对三维位置和姿态角度跟踪进行了仿真(见图3)。

图3 UUV位置跟踪三维效果
设仿真的期望轨迹为:
(19)
偏航角期望常数为ψd=π/3,真实惯性矩阵I=diag(0.004,0.004,0.008),配置半径l=0.5 m。仿真时间为30 s。
由仿真结果图4~7可知,在2种控制器的作用下,UUV为位置跟踪误差最终趋于零,在本文所设计的改进滑模控制器作用下,UUV能够进行期望的轨迹跟踪和姿态角度跟踪。采用自适应滑模控制策略的偏航角的超调时间较短,能快速准确达到稳态设定值,纵轴与来流之间的攻角迅速变化且较为平缓,横舵角较稳定,不易出现抖动现象,此控制器能够对姿态角度和航迹进行较好地跟踪。
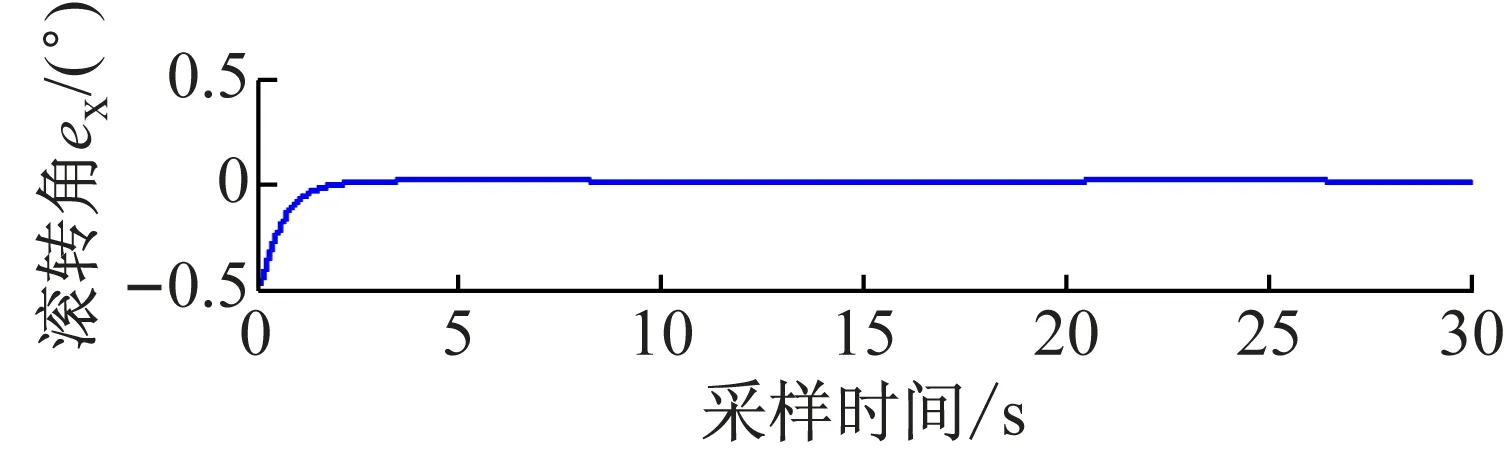
图4 位置跟踪误差

图5 姿态角度跟踪

图6 水流干扰自适应估计
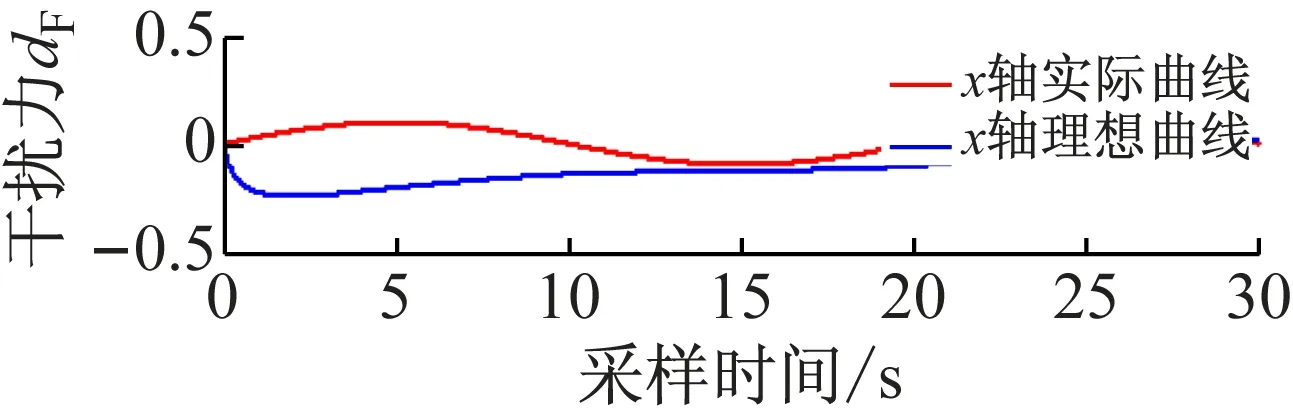
图7 干扰力自适应估计
4 系统实际测试结果与分析
本设计为进行准确的航行轨迹跟踪实际测试,采用LabVIEW软件编写了UUV参数整定软件,界面如图8、9所示。
利用该平台对UUV在潜行过程中的姿态角度进行动态系统测试,利用的是英国QinetiQ公司开发的水下仿真环境ODIN UUV,在滑模跟踪控制系统的作用下使UUV按照理想轨迹和角度航行,通过观察3种姿态角度的响应曲线反映该系统是否能够实现系统良好的跟踪控制。图10~12为UUV在滑模控制系统作用下,3种姿态角的采样跟踪变化曲线。

图8 仿真实验对象ODIN UUV

图9 UUV姿态角测试平台
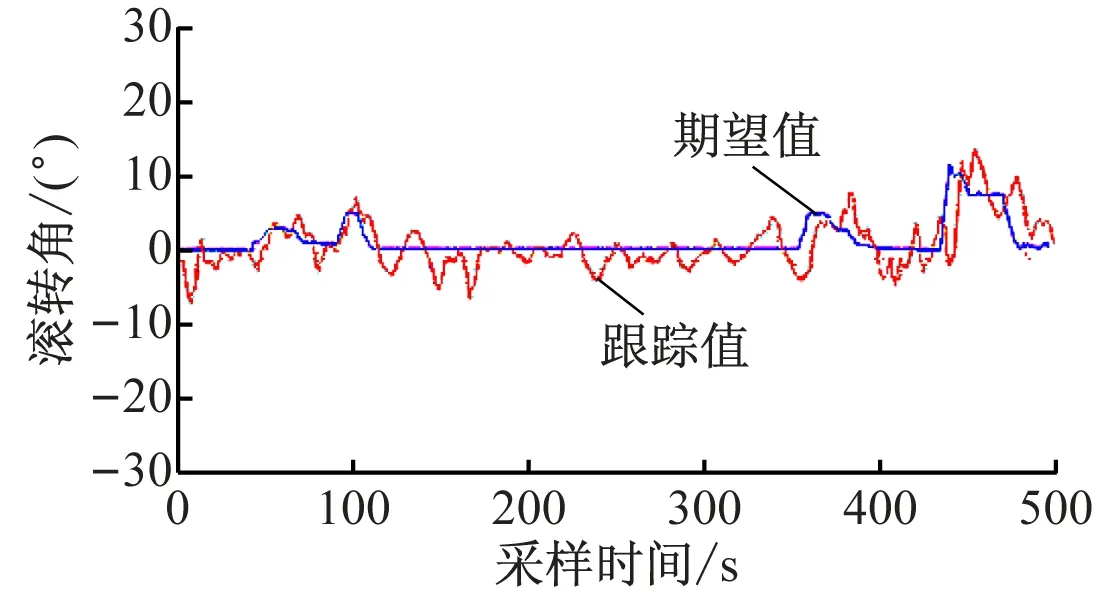
图10 UUV滚转角采样曲线

图11 UUV俯仰角采样曲线

图12 UUV偏航角采样曲线
观察采样曲线发现,在跟踪过程中有较大抖动出现,其对应为外界水文环境的扰动。从图中可以看出,UUV跟踪采样曲线在3种方向角曲线在海洋干扰情况下均没有出现较大的抖振或发散的变化,当控制指令发出时,滑模跟踪控制系统对其都进行了较好的控制,表明在外界干扰和参数扰动情况下,该系统能够快速跟踪理想期望角度并估计未知部分变化,使角度维持在期望值附近,通过变化参数的反馈作用,补偿模型干扰的影响。通过对3种角度的综合控制,系统能够保证欠驱动UUV的稳定航行。
5 结 语
针对外界复杂水文环境的交互下的航行体水平面航迹跟踪,贯穿PID双环控制的思想,UUV控制系统采用虚拟滑模算法控制输入,提出双闭环自适应航迹跟踪滑模控制策略。首先,在外环控制器中产生角度指令并传递给内环系统,外环产生的误差通过内环控制消除,设计内环控制律,在不需要惯性矩阵模型确切信息的情况下,通过姿态控制实现对外环产生的角度指令的跟踪。该控制器能够成功克服传统控制器中存在的“抖振”问题,对参数不确定和水文环境干扰能够进行自适应补偿,能够实现对UUV较好的航迹跟踪和平稳控制[18]。最后,通过Matlab软件仿真和姿态稳定控制平台测试,充分验证了本文所设计的双闭环航迹跟踪滑模控制器能够在外界存在扰动的情况下,实现对UUV期望航迹的精确跟踪。
猜你喜欢
石油沥青(2021年1期)2021-01-11
广东医科大学学报(2020年6期)2020-02-06
青年歌声(2019年12期)2019-12-17
中医眼耳鼻喉杂志(2019年2期)2019-04-13
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01
焊接(2015年5期)2015-07-18
舰船科学技术(2015年8期)2015-02-27
