
线性时滞系统稳定性优化技术研究
2018-09-28 08:51方庆霞王彩卓何颖子
周口师范学院学报 2018年5期
方庆霞,王彩卓,何颖子
(贵州工程应用技术学院 理学院,贵州 毕节 551700)
系统的主要变化趋势,不仅受到当前状态的影响,也与过去一段时间的运行状况具有十分紧密的联系.如果从控制理论入手看待系统的运行情况,可知系统当前阶段的状态,是由过去状态衍生而来,且这种衍生关系将会一直保持下去,这种保持时间滞留特性的系统,就被称为时滞系统.时滞现象在各类工程应用系统中都时有发生,最常见的包括神经网络、工业核反应堆及飞机飞行控制器等[1].如何更好地提升系统稳定性、实现控制系统持久稳定地运作,是现阶段时滞系统亟待改进的问题.时滞现象的发生,不仅会在一定程度上降低系统的综合能动性,也会使系统陷入一种波动状态,无法保持高度稳定性,进而给人为控制系统造成较大困扰.传统时滞系统依靠时滞模型,计算系统的基础时延,再通过联立基础时延与系统运行时间的方式,确定系统过去运行状况对当前阶段状态的影响程度[2-3].这种方式需要大量的数据运算,才能保证时滞模型的准确无误,不仅造成大量人力资源的浪费,也不能从根本上提升系统的稳定性.为改善这种不良的系统形态,对线性常时滞系统、线性变时滞系统的稳定性优化技术进行研究,力求早日实现人为控制系统运行的目的.
1 线性常时滞系统稳定性优化技术
线性常时滞系统的稳定性优化技术,由基于积分不等式、基于增广Lyapunov、基于二次凸组合三方面应用的分析组成,具体研究过程,可按如下步骤进行.
1.1 基于积分不等式的稳定性优化
基于积分不等式的线性常时滞系统稳定性优化分析,主要针对积分不等式、时滞相关稳定性两项定理进行[4].积分不等式定义可描述为:在任意符合维数条件的恒定矩阵W中,存在两个标量a和b,若a、b间的关系满足ab,则如公式(1)所示的积分不等式恒成立.
(1)
其中,y代表固定时滞指标,O代表时滞原矩阵,p代表指标固定系数.时滞相关稳定性,对固定时滞指标y的限制条件可表示为:
(1+k)y<0
(2)
其中,k代表时滞相关稳定系数.若某系数同时满足公式(1)和(2),则可认为该系数即为一个固定时滞指标y.通过这种寻找y的方式,完成基于积分不等式的线性常时滞系统稳定性优化分析.
1.2 基于增广Lyapunov的稳定性优化
基于增广Lyapunov的线性常时滞系统稳定性优化分析,包含Lyapunov泛函定义的提出及证明两部分.Lyapunov泛函定义,对固定时滞指标的缩放范围进行限制,且这种限制关系的确定,一定程度上利用自由权矩阵法,增加保守性估计的准确性[5].Lyapunov泛函定义可具体表示为:
U(y)=U1(y)+U2(y)+L+Un(y)
(3)
其中,U代表Lyapunov泛函定义结果,U1,U2,…,Un代表Lyapunov泛函定义过程的参与量,y代表固定时滞指标,n代表Lyapunov泛函的定义次数.上述过程,完成Lyapunov泛函定义的提出,利用公式(3)的计算结果U(y),可将Lyapunov泛函定义的证明流程表示为图1.

图1 Lyapunov泛函定义的证明流程图
根据图1可知,当某参数疑似固定时滞指标y时,通过公式(3),计算出该参数的Lyapunov泛函定义结果U(y),再利用公式(1)和(2),对该参数的固定时滞限制条件进行计算.若计算结果真实有效,则认为由该参数完成的Lyapunov泛函定义成立,否则认为该参数不满足固定时滞指标y的选取条件.通过上述过程,完成基于增广Lyapunov的线性常时滞系统稳定性优化分析.
1.3 基于二次凸组合的稳定性优化
基于二次凸组合的线性常时滞系统稳定性优化分析,可以利用公式(3)的计算结果,对固定时滞指标y的保守稳定性规则进行深度规划[6].规定x1,x2,x3,x4分别作为固定时滞指标y的四个方向向量,其中每个向量与固定时滞指标y间的关系,可表示为:
(4)
如果这四个方向向量间的关系满足x1≠x2≠x3≠x4≠0,则下面的式子成立:

(5)
其中,f(x1),f(x1),f(x3),f(x4)分别代表固定时滞指标y四个方向向量的简单规划结果,r代表凸组合系数,ξ代表稳定性优化常数.联立公式(3)、(4)、(5),可完成基于二次凸组合线性常时滞系统的稳定性优化分析.
2 线性变时滞系统稳定性优化技术
线性变时滞系统的稳定性优化技术,由一般型、中立型、混合型三方面应用的分析组成,具体研究过程,可按如下步骤进行.
2.1 一般型变时滞系统的稳定性优化
一般型变时滞系统的稳定性优化分析,主要针对非固定时滞指标进行.非固定时滞指标被定义为一种非正规标量,在具有镜面对称关系的对角矩阵中,这种非正规标量可以随着矩阵维数的变化而变化[7].假设具有镜面对称关系的对角矩阵,共包含8个不全等行关系、8个不全等列关系.其中第一行8个元素,可用数字1~8代替;第二行第一个元素为非固定时滞指标,其余7个元素,可用数字1~7代替;第三行前两个元素为非固定时滞指标,中间四个元素,可用数字1~4代替,其余两个元素为0;第四行前三个元素为非固定时滞指标,其余5个元素,可用数字1~5代替;第五行前四个元素为非固定时滞指标,其余4个元素,可用数字1~4代替;第六行前五个元素为非固定时滞指标,中间2个元素,可用数字1~2代替,最后一个元素为0;第七行前六个元素为非固定时滞指标,第7个元素为数字1,最后一个元素为0;第八行前七个元素为非固定时滞指标,最后一个元素为数字1.这种具有镜面对称关系的对角矩阵结果,可表示为图2.

图2 一般型变时滞系统的对角矩阵结构图
在图2所示的对角矩阵中,α代表非固定时滞指标,通过分析该指标,在矩阵中所处的具体位置及所占比重,可完成一般型变时滞系统的稳定性优化分析.
2.2 中立型变时滞系统的稳定性优化
中立型变时滞系统的稳定性优化分析,是在图2所示对角矩阵的基础上,研究当镜面对称关系不存在时,系统时滞现象的变化情况[8].为了更方便地表现出中立型时滞系统稳定性的变化情况,将规范的8行8列矩阵,拆分成4个4行4列矩阵.每一个矩阵的第一行4个元素,都可以用数字1~4代替;第二行第一个元素为非固定时滞指标,其余3个元素,可用数字1~3代替;第三行前两个元素为非固定时滞指标,第三个元素可用数字1代替,最后一个元素为0;第四行前三个元素为非固定时滞指标,最后一个元素可用数字1代替.按照左上、右上、左下、右下的顺序,可将这4个矩阵依次编号为1,2,3,4,具体矩阵结构及相互之间的对应关系,如图3所示.

图3 中立型变时滞系统的分矩阵结构图
图3中带有箭头的直线,代表分矩阵中非固定时滞指标α的流动关系.分析图3可知,分矩阵(1)中非固定时滞指标α,可自发地流向分矩阵(2)和分矩阵(3);分矩阵(2)中的非固定时滞指标α,可自发地流向分矩阵(3)和分矩阵(4);分矩阵(3)中非固定时滞指标α,可自发地流向分矩阵(4).分析非固定时滞指标α在每个分矩阵中所占比重,并记录α的每一次流动时间,利用上述两组数据,完成中立型变时滞系统的稳定性优化分析.
2.3 混合型变时滞系统的稳定性优化
混合型变时滞系统的稳定性优化分析,是在图2所示对角矩阵的基础上,研究当镜面对称关系部分存在时,系统时滞现象的变化情况[9-10].为了更方便地表现出混合型时滞系统稳定性的变化情况,将规范的8行8列矩阵,拆分成2个4行8列矩阵.每一个矩阵的第一行8个元素,可用数字1~8代替;第二行第一个元素为非固定时滞指标,中间6个元素,可用数字1~6代替,最后一个元素为0;第三行前两个元素为非固定时滞指标,中间4个元素,可用数字1~4代替,最后两个元素为0;第四行前三个元素为非固定时滞指标,中间2个元素,可用数字1和2代替,最后三个元素为0.按照由上至下的顺序,可将这2个矩阵编号为1和2,具体矩阵结构及相互之间的对应关系,如图4所示.
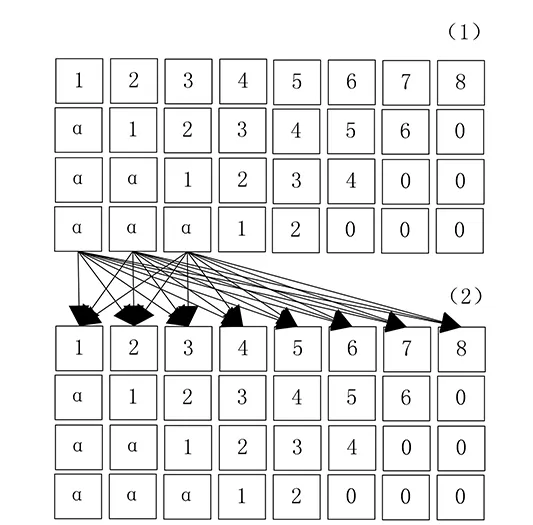
图4 混合型变时滞系统的分矩阵结构图
分析图4可知,分矩阵(1)最后一行包含3个非固定时滞指标α,分别处于该行的第1、2、3列.这三个非固定时滞指标α,可自发地流向分矩阵(2)第一行中的每一个元素,形成一种非固定时滞指标与数字相连的形式,且这种形式不可逆.而分矩阵(1)中第2行、第3行的非固定时滞指标α,不可以进行自发流动.分矩阵(2)中,所有非固定时滞指标α,都不可以进行自发流动,处于该矩阵的所有元素,只具有承受能力,不具有发送能力.分别记录分矩阵(1)中,最后一行3个非固定时滞指标α,流向分矩阵(2)中第一行元素的时间,并计算分矩阵(1)和(2)中所有非固定时滞指标α占总元素的比重,利用上述两个计算结果,完成混合型变时滞系统的稳定性优化分析.
3 实验结果与分析
上述过程,完成新型时滞系统稳定性优化技术研究.为验证优化后时滞系统的实用性价值,设计如下对比实验.以两台配置完全一样的计算机,作为实验对象,随机挑选一台计算机,并在其中安装优化后时滞系统应用程序,将其作为实验组备用;在另一台计算机中,安装优化前时滞系统应用程序,并将其作为对照组备用.实验开始前,可按照下表完成实验参数设定.
3.1 实验参数设定

表1 实验参数设定表
表1中数据依次代表预估系统稳定性、系统稳定系数、预估人为控制程度、人为可控性系数、时滞现象出现概率、线性时滞周期.为保证实验的公平性,实验组、对照组的参数,始终保持一致.表1中的数据均为理想状态下的理论值,在实际应用过程中,仅能起到参考作用.
3.2 系统应用稳定性对比
根据表1可知,理想状态下优化前后线性时滞系统的应用稳定性,均为87.62%.在保持实验组、对照组系统数据处理总量相同的情况下,分别记录两组系统的真实稳定性,并将测量结果与理想值对比,具体实验结果,由图5、图6所示.
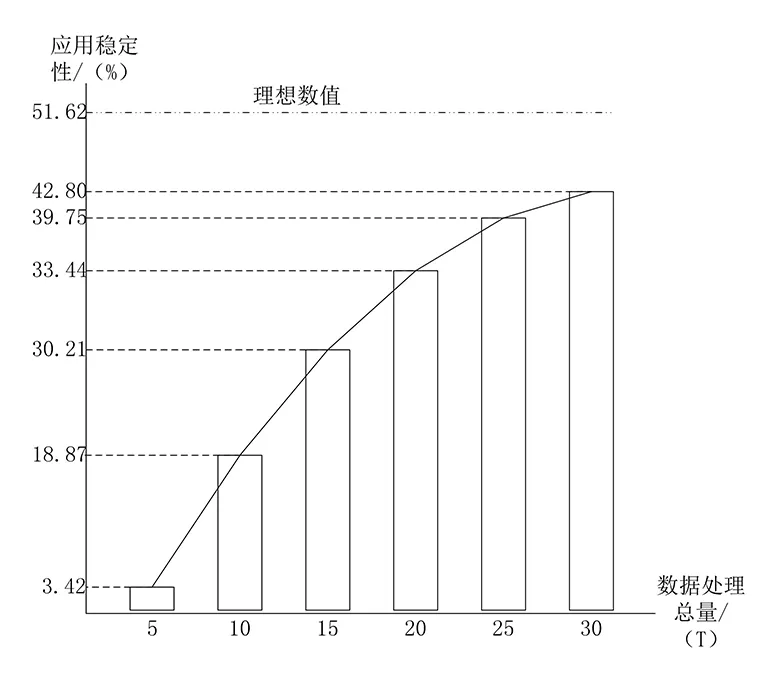
图5 系统应用稳定性(实验组)图
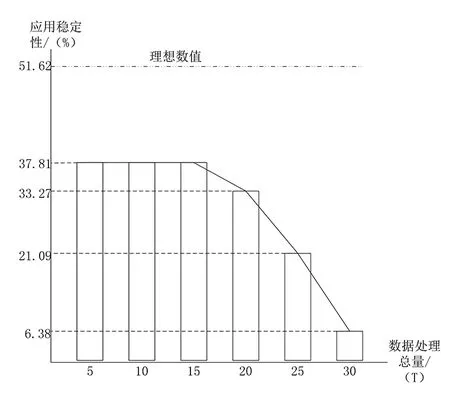
图6 系统应用稳定性(对照组)图
分析图5可知,随着数据处理总量的增加,实验组系统的应用稳定性呈现逐渐增加的趋势,但增加幅度逐渐减小,当数据处理总量为30 T时,实验组系统的稳定性达到最大值42.80%,与理想值间差距为8.82%.分析图6可知,随着数据处理总量的增加,对照组系统的应用稳定性呈现先水平再下降的趋势,且下降阶段的幅度逐渐增大,当数据处理总量保持在5~15 T范围内时,对照组系统的应用稳定性,始终保持在最大值37.81%,与理想值间差距为13.81%,远大于实验组.所以,可证明应用新型时滞系统稳定性优化技术,能够使系统应用稳定性得到近5%的提升.
3.3 系统的人为可控性对比
根据表1可知,理想状态下优化前后线性时滞系统的人为可控性,能够达到67.14%.系统的人为可控性与APR指标间,存在一定的制约关系.随着APR指标的不断增大,线性时滞系统人为可控性呈现逐渐下降的趋势,反之则上升.在保持实验组、对照组系统数据处理总量相同的情况下,分别记录两组系统APR指标的变化情况,并将测量结果与理想值对比,具体实验结果,由图7、图8所示.

图7 系统人为可控性(实验组)图

图8 系统人为可控性(对照组)图
分析图7可知,随着数据处理总量的增加,实验组系统的APR指标,呈现出较为稳定的波动状态,当数据处理总量为1.96 T时,APR指标达到最大值10.84%,与目标值11.04%间差距为0.20%;实验组系统的人为可控性,也呈现出较为稳定的波动状态,当数据处理总量为3.85 T时,人为可控性达到最大值58.05%,与目标值57.41%间差距为0.64%.分析图8可知,随着数据处理总量的增加,对照组系统的APR指标,呈现出较为稳定的波动状态,当数据处理总量为14.03 T时,APR指标达到最大值42.32%,与目标值11.04%间差距为32.28%,远大于实验组;对照组组系统的人为可控性,也呈现出较为稳定的波动状态,当数据处理总量为10.89 T时,人为可控性达到最大值30.00%,与目标值57.41%间差距为27.41%,远大于实验组.所以,可证明应用新型时滞系统稳定性优化技术,能够从根本上加强系统的人为可控性.
4 结束语
通过对线性常时滞系统、线性变时滞系统稳定性优化技术的研究,达到对系统进行人为控制的目的.且实验结果可证明,优化后时滞系统的稳定性,确实得到一定程度的促进.未来将以此次研究作为出发原点,对系统的线性时滞现象,进行更加深入地探索,力求做到逐渐降低时滞现象对系统应用造成的影响,全面提升系统稳定性.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年5期)2021-11-19
石油沥青(2021年4期)2021-10-14
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
中学生数理化·高一版(2021年2期)2021-03-19
自动化学报(2019年6期)2019-07-23
北方工业大学学报(2019年5期)2019-03-30
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
卷宗(2018年14期)2018-06-29
现代防御技术(2016年1期)2016-06-01
