
桥式起重机的鲁棒输入整形控制方法研究
2018-09-25 13:03:20王晓军
现代制造技术与装备 2018年8期
王晓军
(上海工程技术大学,上海 201620)
1 研究背景
在港口、仓库及其他工业现场,桥式起重机被广泛用于传输、调度重型货物。然而,在桥式起重机的操作过程中,由于小车的加减速、负载的提升等因素,负载会产生来回的摆动。这种未控制的摆动不但很容易引起生产安全问题,而且严重阻碍了作业效率的提高。为解决上述问题,起重机的自动控制引起了人们很大的兴趣。
基本上,这些控制方法可以归为两类:开环控制和闭环控制。们对桥式卸船机的自动控制研究也主要集中在闭环控制方法上,其中有增益调节[1]等,但闭环控制效果依赖于系统设计以及硬件传感器。所以,前馈控制同样得到了很大关注。其中,输入整形和最优控制技术是最常见的两种开环控制方法。对于最优控制,人们设计不同的性能指标来获取某种意义上的最优参考曲线[2]。而输入整形技术是由一系列加减速脉冲组成,能够在运行终点位置消除或大幅度减小残留振动,而且通过增加输入整形器的鲁棒性,可以适应系统参数的变化[3]。
综上所述,本文设计了一种基于鲁棒输入整形技术的桥式起重机控制方法。鲁棒输入整形技术用来消除或减小负载振动,同时提供小车的参考速度曲线,并且对绳长变化鲁棒性好。
2 系统模型描述
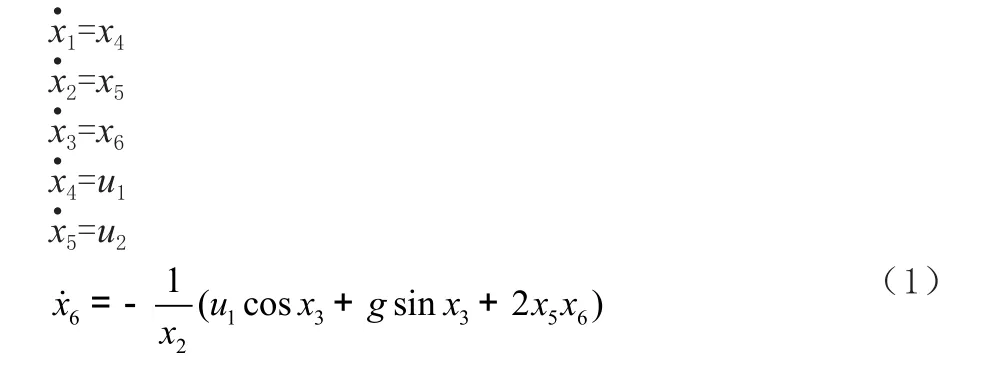
式中,状态向量为:

控制向量为:

3 输入整形技术
输入整形是在计算机控制中用来减小残留振荡的一种前馈技术。输入整形技术将期望的系统输入和一系列脉冲序列进行卷积,而产生整形的输入来驱动系统[3]。
输入整形作为一个前馈单元,包含一系列不同幅值和时滞的脉冲序列,整形过程如图1所示。此例中,期望的系统输入是一个阶跃输入,输入整形器包含两个脉冲,对二者进行卷积,便可得到一个整形输入:一个阶梯形输入。用这个输入来驱动系统,将能有效减小系统的残留振荡。
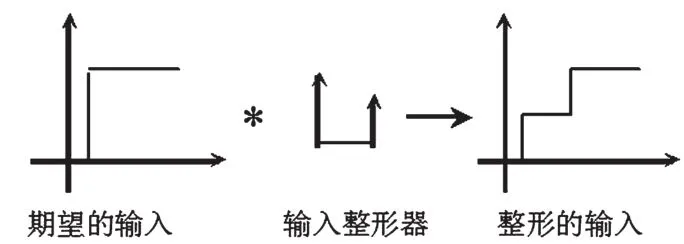
图1 输入整形过程
本文主要介绍3种输入整形器,分别为:零振荡(ZV)整形器,零振荡和微分(ZVD)整形器和极不灵敏(EI)整形器。ZV整形器在建模频率处余振为零,鲁棒性较差。ZVD和EI整形器则增加了鲁棒约束,从而减少对建模误差的灵敏度。ZVD整形器同时满足ZV约束和振动幅值对频率ω的微分在模型频率处为零。而EI整形器则是使残留振荡在模型频率处等于一个较小的非零值,而在比模型频率稍微高和低的频率处残留振荡为零,其在模型频率处残留振荡的微分仍为零,这样大大提高了对建模误差的不灵敏度[3]。
4 仿真结果
图2是把三种整形方法应用到起重机防摆控制中的仿真结果。图中对每一种整形器分别考虑了两种情况:无负载提升和负载提升2m。结果表明,由于ZV整形器没有加入鲁棒约束,因而对绳长变化产生的频率()变化比较敏感,考虑到提升时振动显著增加。ZVD整形器则对提升时的频率变化鲁棒性较好,并且显著减小了负载摆角的幅值。EI整形器虽然在无提升时仍存在余振,但考虑负载提升时,却可以保证系统对绳长变化的鲁棒性。

图2 输入整形法有无提升时振动效果对比
研究表明,ZV整形器和经典的梯形速度曲线防摆方法比较相似,对绳长变化比较敏感。而ZVD和EI对频率变化的灵敏度显著提高,更适于起重机的实际控制。而且,采用平均频率时,性能更好。其中,EI整形器对模型误差的鲁棒性要比ZVD整形器要强得多。所以,本文在研究中采用的是EI整形法来产生小车的参考速度曲线,同时,减小负载振动。图3是桥式起重机小车运行60m,负载提升2m的情况下,EI输入整形控制方法下的小车位移、绳长变化以及负载摆动抑制效果。
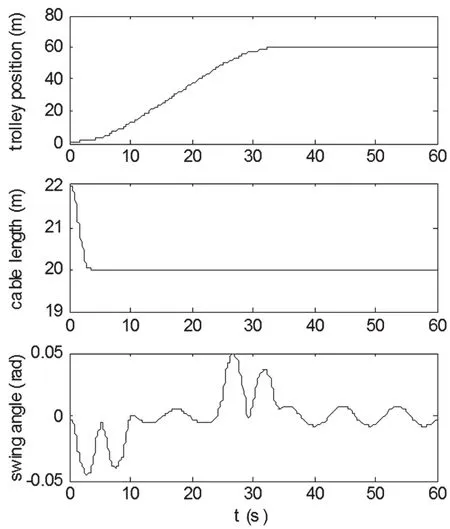
图3 EI输入整形控制方法
5 结论
本文设计了一种基于鲁棒输入整形控制方案来对桥式起重机进行定位和防摆控制研究。其中,鲁棒输入整形技术用来抑制负载大幅度振动,同时提供小车速度参考曲线来完成轨线跟踪控制,从而实现小车的定位。仿真结果证明,该方案的控制性能良好,可有效抑制负载的残留振动。
猜你喜欢
小学生学习指导(低年级)(2021年10期)2021-11-01 08:23:04
小学生学习指导(高年级)(2021年6期)2021-06-19 05:37:34
数学小灵通(1-2年级)(2020年6期)2020-06-24 05:57:56
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
自动化学报(2019年6期)2019-07-23 01:18:18
数学小灵通(1-2年级)(2017年9期)2017-10-13 08:10:15
自动化学报(2017年4期)2017-06-15 20:28:54
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
