无人机低空摄影测量技术在水利工程测量中的应用
2018-09-23 06:48陈小龙王海涛董快鸽
陕西水利 2018年5期
陈小龙,王海涛,董快鸽
(1.西安迪飞科技有限责任公司,陕西 西安 710018;2.陕西水环境工程勘测设计研究院,陕西 西安 710018)
0 引言
无人机低空摄影测量指利用无人机在航高1000 m以下进行的数字航空摄影测量。主要应用于:灾害应急测绘、小范围大比例尺地形图测绘与更新、三维城市建模、文物考古与保护等方面。无人机低空摄影测量系统主要由飞行平台、飞行导航与控制系统(飞控系统)、地面监控系统、任务设备、数据传输系统、发射与回收系统、地面保障设备组成。飞行平台主要指无人机的机体,如:固定翼、旋翼无人机等;任务设备主要指无人机所搭载的设备,如:数码相机、光谱相机、倾斜镜头、雷达扫描仪等。
1 无人机低空摄影测量技术的作业流程
1.1 主要步骤
无人机低空摄影测量的作业流程大致可分为控制测量、航空摄影、内业加密、产品生产四个步骤。

图1 无人机低空摄影测量作业流程图
1.2 关键环节
(1)相机检校,由专业检校厂商进行检校,在镜头发生松动或影响空三精度的情况下,需要进行检校。
(2)航线设计,由无人机配套提供,既可进行航线设计,也可以进行飞行控制。
(3)图像处理:利用影像处理软件进行图像纠偏。
(4)影像量测:专业软件中同名点匹配,控制点刺点。
(5)空三加密:专业软件进行平差、计算外方位角。
(6)DEM提取:在专业软件中将DSM模型中的建筑物、地表植被压平。
(7)DOM生成:专业软件生成正射影像。
(8)DLG生产:使用手轮、脚盘、测图软件完成线画图绘制、编辑。
2 无人机低空摄影测量技术的应用
2.1 测区概况
某地拟建水库位于陕北地区,属山地地形,沟壑山地错综复杂,高程为900 m~1200 m之间,比高为300 m。测区纵向范围为:拟建坝址轴线上游4.0 km,高程约1100 m处,下游2.7 km。横向范围为:坝肩至塬面以外10 m,高程约1100 m处。拟建库区范围三条支沟,常年流水,水深约0.1 m~0.5 m,其中两条支沟交汇处下游0.3 km、2.0 km处分别有土坝、混凝土坝拦截蓄水,水深约1 m~6 m。各支沟可徒步进入,测区沟深山高,沟底蜿蜒曲折,虽然植被以矮小灌木为主,但通视条件一般。
2.2 控制测量
测量采用“先像控后航测”的解决方案,西安1980挂靠独立坐标系,1985国家高程系统,四等平面高程控制,联测3个C级平面控制点、2个Ⅱ等高程点,埋设控制桩8个,严格按照《水利水电工程测量规范》(SL197-2013)执行,全网共组成同步环40个,异步环60个,水准线路长度为26.9 km,实测闭合差为-70.0 mm,允许闭合差为±103.7 mm。选取均匀分布于测区的5个四等控制点进行参数求解,像控点测量、检查点测量和断面测量均采用此参数。
2.3 航空摄影
采用华测P310垂直起降电动无人机进行低空摄影测量作业。
(1)航高设计:无人机搭载SonyA7RⅡ定焦单反相机,像幅大小 7952×5304 pixel,像元大小 4.52 μm,焦距 36.22 mm,成图精度 1∶1000,地面分辨率(GSD)0.06 m,相对航高 450 m。
(2)航线设计:利用无人机地面控制软件,设定航向重叠度80%,旁向重叠度60%。考虑到航时安全,分2个架次共21条航带进行航摄。
(3)像控点布置:采用区域网布点法,共布设像控点23个,像控点布设应尽量选择在地势平坦区域,避开砖窑烟囱、垃圾桶、电线杆等地面明显凸起物,一般用白石灰在地面布“十字丝”,便于无人机拍摄。航线及像控点布置如图1所示,像控点布置图如图2所示。

图1 航线像控点分布图

图2 像控点布置图
(4)航飞数据检查:下载POS和1180张影像数据,经测区影像快速拼接后,摄影面积33.87 km2,地形高度1019 m~1272 m,绝对航高1591 m~1603 m,依据《低空数字航空摄影测量外业规范》(CHZ 3004-2010)和行业经验进行质量评估,飞行质量满足相应要求。
(5)像控点测量:平面位置中误差不超过图上±0.1 mm,高程中误差不超过1/10基本等高距。
2.4 外业调查调绘
(1)水工建筑物调查测量:对测区内淤地坝、溢流坝坝顶高程、淤积面高程即临水坡脚高程进行调查测量,对抽水泵站管径及位置进行调查测量。
(2)地形图调绘:依据拼接影像,结合测量范围进行实地调绘,主要调绘测区内村庄名称、房屋属性、通讯线、电力线、道路材质、交通桥等地物。调绘过程中根据需要采用GPS-RTK方法实测部分管线设施。
2.5 内业数据处理
(1)影像纠偏:镜头正中间畸变最小,越到边缘畸变越大,结合相机检校报告,采用专业软件,对所采集像片进行纠偏和格式转换。
(2)空三加密:各类空三加密软件使用步骤大同小异,基本都是按照“新建工程→导入数据→生成航带→处理影像→提取同名点→刺点测量→平差解算→精度评估→建立模型”这几个步骤[1]进行。
(3)数据生产:使用专业软件生成DEM、DOM等数据;借助立体眼镜、手轮脚盘,使用航天远景、适普、JX4等线画图采集软件,由专业采集人员完成线画图采集工作。数据生产成果如图3、图4所示。
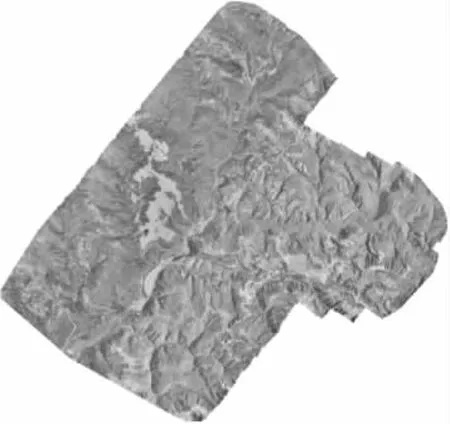
图3 正射影像图
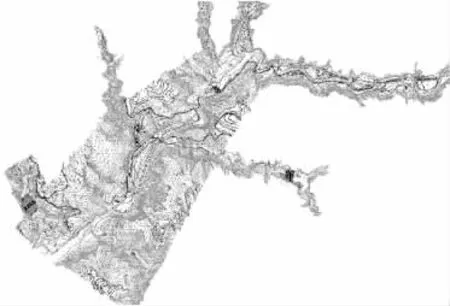
图4 线画图采集成果
(4)编辑入库:采集完的数据,需要导入常用的测绘数据编辑软件(如CASS、曹Map、iData等)中进行数据编辑、属性录入、质量的检查,数据转换,进行标准化入库。
2.6 精度评估
(1)模型精度:将部分检查点导入到空三模型中,进行模型精度评估,共导入152个检查点,精度结果满足要求,精度结果见表一。
(2)成果精度:对采集完的线画图进行人工抽检,数据精度达到1∶1000成图精度。
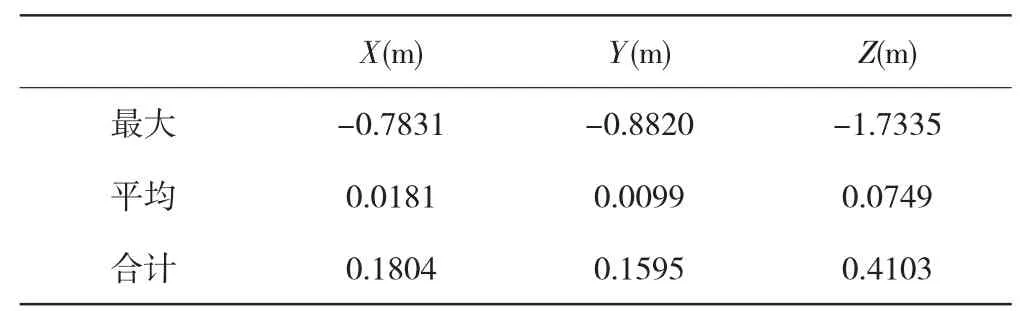
表1 模型精度表
2.7 作业注意事项
(1)禁飞区域:无人机航测属于低空飞行,应避免军事区和民航禁空区作业,国家已经出台一些管制规定,可参照执行。
(2)无人机保险:部分测量设备公司已经与保险公司合作,承担无人机损失险以及第三者责任险,保障无人机低空摄影测量作业安全。
3 结语
从无人机低空摄影测量技术的应用效果来看,其测量精度能够基本满足水利工程测量的要求,但应用中也还存在以下问题值得我们注意:
(1)无人机低空摄影测量只是将大部分繁重的外业测量工作转为内业处理,因此人员和资金投入并没有减少。
(2)测区中存在大面积水域,必须结合水下测量,才能将地形完整还原。
(3)等高线数据采集工作是制约整个数据处理环节效率的主要因素,植被覆盖少、模型精度高的测区,完全可以借助软件自动生成等高线。
(4)大面积测区不太适用无人机低空摄影测量,反倒会导致影像数据增多,加大外业控制和内业处理难度。
无人机低空摄影测量技术已经十分成熟,但其在水利工程测量中的应用时间还不长,具体项目中应合理选择技术方案,将无人机作业效率最大化。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
测绘通报(2019年4期)2019-05-10
同济大学学报(自然科学版)(2018年11期)2018-12-04
测绘通报(2018年10期)2018-11-02
北京航空航天大学学报(2017年9期)2017-12-18
传媒评论(2017年2期)2017-06-01
传媒评论(2017年2期)2017-06-01
南方文学(2016年3期)2016-06-12