
基于单片机的卡车盲点警示与监控系统设计
2018-09-22 03:14:02夏新春胡顺安
常熟理工学院学报 2018年5期
顾 斌,周 胥,冒 武,夏新春,胡顺安
(1.常熟理工学院 汽车工程学院,江苏 常熟 215500;2.上海易沃汽车设备有限公司,上海 201100)
1 引言
随着社会经济的发展,货物的周转愈发频繁,卡车在交通运输中扮演着不可或缺的角色,但由于其自身结构原因在行车环节中极易形成盲区,即使是大曲率的后视镜也无法完全避免.图1所示为某卡车盲区,ABCDE 5处均为视野盲区,极易造成安全事故,尤其在内轮差盲区,见图2.上述盲区的存在显然增加了卡车行驶的危险性和对道路交通安全的影响,驾驶者稍有不慎,其后果不堪设想.
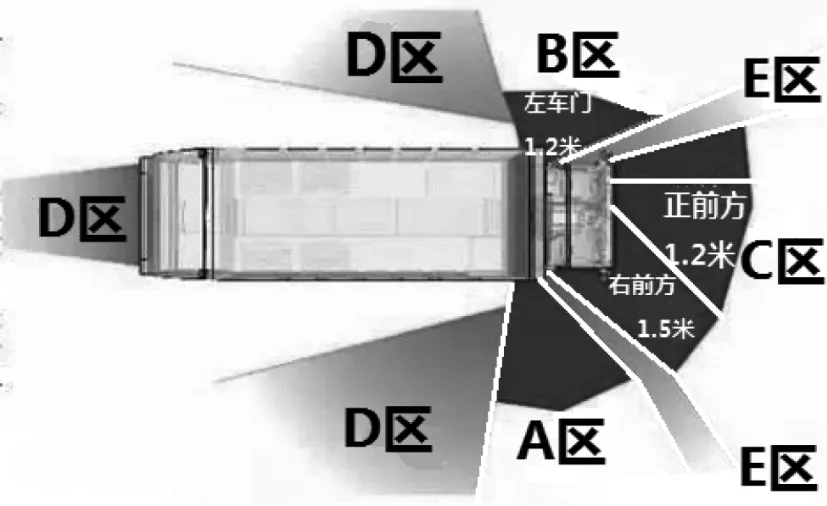
图1 卡车盲区分布示意图

图2 卡车内轮差盲区示意图
世卫组织在《2015年全球道路安全现状报告》中指出,交通安全状况虽有改善[1],但全世界由于后视镜盲区造成的交通事故约占30%.据德国保险协会预测,盲点监测系统的推广普及可减少近半成的卡车事故,同时能有效减少约1/3的卡车事故死亡人数.欧盟(EU)早在2006年颁布的2003/97/EC法规中,要求卡车生产商生产的所有重型车都必须安装盲点后视镜,以有效延伸后视野区域[2].
基于以上分析,现研发一种基于单片机的卡车盲点警示与监控系统,结合视频成像技术和雷达探测技术实现对盲区范围的实时监测,通过蜂鸣器鸣叫、警示灯闪烁、车距实时显示、监控视频反馈等多种技术手段达到提醒驾驶员的目的,从而减少盲区事故的发生.
2 系统结构及主要部件
2.1 系统功能综述
系统结构图和安装示意图如图3、图4所示.根据驾驶员实际行车的需求设定了系统的各项技术指标.当车钥匙拨至ON挡时,系统启动,并对探测性能进行自我检测,若系统自检正常,蜂鸣器“Bi----”一声提示,同时显示器动态扫描一次,若自检发现探头错误,蜂鸣器“Bi-Bi-”两声提示,显示器提示自检出错的探头编号.
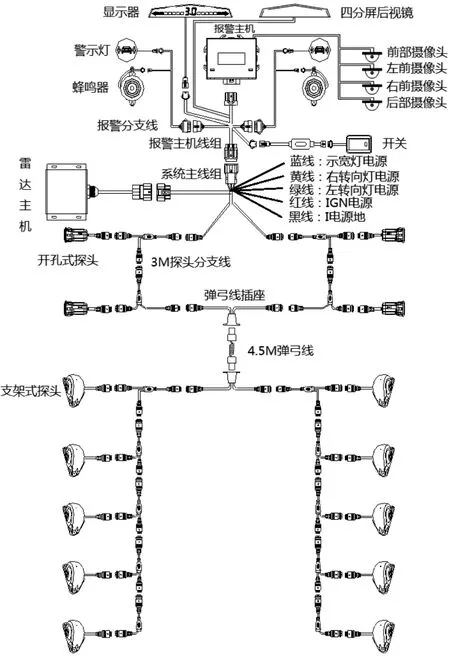
图3 盲点警示与监控系统结构图

图4 盲点警示与监控系统安装示意图
系统的连接线束选取带有隐藏布线的屏蔽护套电缆,保证在有电磁干扰环境下系统的优良传输性能,其中插接器选取防护等级较高的航空接头,防振性能优良[3].雷达探测系统始终工作,选用6路收发一体式超声波探头进行测距,并会比对出6路测距计数值中的最小值[4],并将其输出至中控台左上方的距离显示器.其中4个开孔式探头安装在驾驶室周围,其余2个以支架式(螺栓固定)安装在车厢周边(支架式探头数目可根据车长增减),并通过弹性线将支架式探头和开孔式探头的线路连接起来.所有探头时刻将距离信息反馈至雷达主机,若雷达主机判断出来车距离小于预先设置的阈值则判定存在安全隐患,并将信息通过主线组传至报警主机,报警主机将启动所控制的各“效应器”.首先控制对应方向外后视镜内部的警示灯亮起,其原理在于安装在高反射率镜面后端的一块小型嵌入式TFT-LCD液晶显示屏,利用镜面单方向的高透射性,将液晶显示屏上红色警示标识透过镜面进行显示[5];其次,驾驶室内左右分别布置一个无源蜂鸣器,借助单片机等电子元器件,采用合适的直流电压驱动蜂鸣器进行多频鸣叫,实现不同工况下的发声效果[6];同时距离显示器会显示来车方向与距离;最后报警主机控制6个来自Integrated Micro-electronics的小型摄像头将所获视频信息传输至四分屏后视镜进行显示.系统在不同行车状态下的工作状态,见表1.

表1 卡车盲点警示与监控系统工作方式
当汽车开启示宽灯时,警示灯的亮度自动降低,减少对驾驶员的影响,即警示灯亮度自动调节功能.
2.2 超声波雷达探头
鉴于超声波的优良物理性能,该系统借助6个具有较大探测范围的超声波雷达探头进行非接触式测距.
该系统中的超声波雷达采用往返时间检测法,并选用常见的40 kHZ超声波频率.其工作原理是通过传感器发射40 kHZ超声波,采集从发射到返回所经历的时间,从而计算出物体间距[7],其原理如图5所示.

图5 超声波测距模块工作原理
2.3 四分屏后视镜
该系统采用四分屏后视镜这一新型显示方式,其结构的特殊性在于将一块嵌入式TFT-LCD液晶显示屏安装于镜面后侧,借助后视镜平面的单向高透射性,从而把液晶显示器上的画面内容穿过镜面进行显示(见图6),暂时性取代传统后视镜.当显示器黑屏时,又恢复成普通的反射镜面[7].
此外,上述显示屏并非一直显示影像,而是在相当长时间内仅作为传统后视镜使用,可有效避免全时工作摄像头由于一直提供图像信息反而容易使驾驶员忽略提示,且比全时工作的摄像头具有更长的使用寿命.
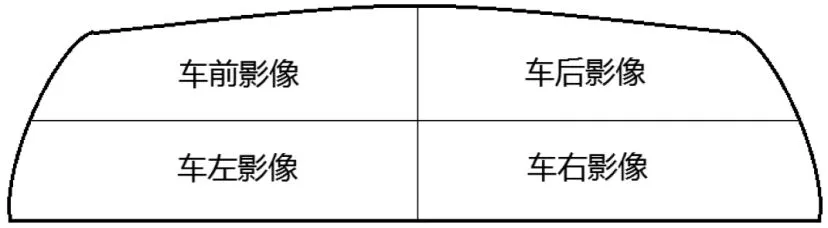
图6 四分屏后视镜工作示意图
2.4 距离显示器
该系统采用数码管进行距离数值的显示,采用胶粘方式布置在主控平台上方偏左位置,相比仪表盘更易观察.信息采集单元为车周身所布置的超声波雷达探头,信息处理单元为单片机,数据显示单元由8位的共阴极数码管和布置成方块、箭头形状的发光二极管构成.超声波雷达探头将测得的信息发送至单片机,单片机经过A/D(模数转换)然后将结果通过数码管显示出来[8].
具体显示界面中,箭头的作用是指明进入阈值范围之内的车辆与该车的相对位置,有左右之分,两侧各6个方形二极管是距离远近程度的直观表示.例如,若该系统设定安全报警阈值为3 m,则可设定距离在0~0.5 m内是亮一个方形二极管,0.5~1.0 m亮两个,1.0~1.5 m亮3个,1.5~2.0 m亮4个,2.0~2.5 m亮5个,2.5~3.0 m亮6个,从而形成直观的距离程度条.例如,图7表示在该车左侧距离3.0 m有车辆驶近,图8表示在该车右侧距离1.8 m有车辆驶近.

图7 左侧来车距离显示器界面
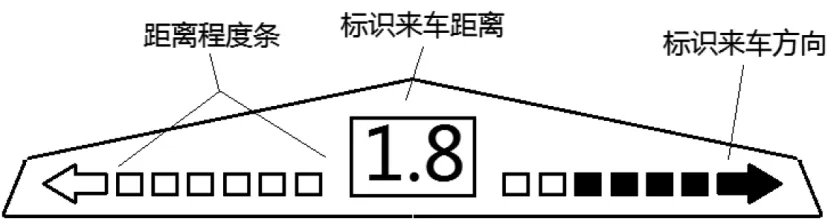
图8 右侧来车距离显示器界面
3 工作方式与原理
如图9所示,当该车钥匙拨至ON挡位时启动系统,电源控制管理模块借助LM2596电源转换模块将车载12 V(或24 V)电源电压转换为适用的5 V电压,进一步为各部件供能;当钥匙退出ON挡系统关闭.在ON状态下,驾驶员可通过开关控制系统的开启与关闭,避免系统故障的情况下对驾驶员产生误导.
控制器为MIK632系统主控MCU8032,结合了报警主机与雷达主机功能,安装于车辆ECU模块附近,同时在其中设置探测距离的有效阈值.6个探测头均选取HCR4型超声波雷达,TRIG及ECHO接口分别与MIK632系统主控MCU8032的A0-A7、B0-B3端口连接.若距离探测头采集到的障碍物距离小于上述阈值,则借助I/O端口与MIK632系统主控MCU8032相连接的距离显示器显示来车距离,同时警示灯工作且蜂鸣器鸣叫,MIK632系统主控MCU8032的C0、C1输出端与左右蜂鸣器连接,来车方向一侧的蜂鸣器将立即鸣叫.同时打开车身摄像头,摄像头的AV信号与MIK2435B信号开关连接,然后MIK2435B信号开关的复合输出端接入MIK632系统主控MCU8032的BT.656,利用高速千兆多媒体串行链路(GMSL)串行器和方形解串器进行视频解析与传输,将视频信息转化为单片机可识别的信号,然后由DAC口和T-CON口输出至LCD四分屏后视镜.

图9 盲点警示与监控系统电路原理图
4 结束语
目前市场上不乏盲点探测系统和监视系统,但两者一般单独运行,例如倒车雷达以及行车记录仪,但其未进行有效融合,故现有技术仍存在很大的提升空间.基于此提供了一种车辆盲区避险警示与监控装置,通过对车辆行驶过程中外界环境的测距,由音频和视频提醒驾驶员进行行车避让从而提高安全性.其优点在于:通过不同位置的距离探测头探测车辆外部障碍物的距离信息,由控制器控制不同位置的摄像头和蜂鸣器工作提醒驾驶员注意安全,当外部障碍物距离车身过近时,打开摄像头提供实时画面至四分屏后视镜,避免全时工作摄像头一直提供图像信息而容易使驾驶员忽略提示的问题,提示效果更好.另外非全时工作的摄像头具有更长的使用寿命.故通过以上途径减少安全事故的发生,在预防交通事故应用方面有着十分重要的作用.
当然,该系统仅仅提供行驶辅助功能,不可能完全消除盲区,要进一步减少盲区影响带来的交通事故,还要卡车等大型车辆驾驶员与行人及其他车辆遵守道路交通法规,理性认识盲区,礼让、谨慎通行,共同维护和谐安全的道路交通环境.
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:36
教书育人(2020年11期)2020-11-26 06:00:12
电脑报(2020年12期)2020-06-30 19:56:42
时代农机(2019年2期)2019-04-24 01:20:14
中国新闻周刊(2017年21期)2017-06-15 10:42:00
青年歌声(2017年9期)2017-03-15 03:33:10
汽车维护与修理(2016年10期)2016-07-10 08:17:41
中国老区建设(2016年6期)2016-02-28 09:32:59
汽车零部件(2015年8期)2015-06-23 13:53:51
汽车维修与保养(2015年12期)2015-04-18 07:51:50
