
磁悬浮飞轮动态UPS系统对拖充放电实验方法研究
2018-09-21 06:22李树胜付永领戴兴建李云龙
储能科学与技术 2018年5期
李树胜,付永领,刘 平,戴兴建,李云龙
磁悬浮飞轮动态UPS系统对拖充放电实验方法研究
李树胜1,4,付永领1,刘 平2,戴兴建3,李云龙4
(1北京航空航天大学,北京 100191;2中电建路桥集团有限公司,北京 100048;3清华大学,北京 100084;4北京泓慧国际能源技术发展有限公司,北京 101300)
首先介绍飞轮动态UPS系统组成及工作原理,并对飞轮交流并网拓扑及阵列结构进行分析。在此基础上,针对电网容量受限和电能浪费问题,开展基于飞轮阵列对拖充放电实验方法研究。通过搭建飞轮阵列硬件平台,给出飞轮UPS的直流母线并网逻辑、软件控制架构和实际对拖实验运行过程。最后给出了磁悬浮飞轮动态UPS实验装置和系统参数。
磁悬浮储能飞轮;动态UPS;对拖充放电控制
飞轮储能技术[1-5]具有充放电迅速、储能密度高、效率高、环境污染小等优点,可应用UPS、能量回收、电网调频调峰、功率补偿等领域[6-8]。结合磁悬浮轴承支撑及控制技术,飞轮转速可以达到几万转,使得飞轮储能技术在功率、储电量及经济性等方面都有很大提升。磁悬浮飞轮储能系统(magnetically suspended flywheel energy storage system,MSFESS)一直是储能领域重点关注对象。
传统的静止式UPS需要配置大容量的化学电池作为储能元件,占地面积大而且需要定期维护、环保性差,采用飞轮替代化学电池作为储能部件称之为动态UPS[9-14],它的不间断供电是依靠高速旋转部件释放动能而实现。当市电接通时,飞轮电机运行于电动状态,驱动转子高速旋转,电能以动能形式进行存储;当市电掉电时,飞轮电机迅速切换至发电状态,转子降速并将动能转化为电能,保持用电载荷不间断电力供应。
飞轮在进行大功率充放电实验中,要求电网具备一定的容量(通常达到兆瓦级以上),多台飞轮组成阵列进行额定充放电功率实验,电网容量基本满足不了要求。因此,通常采取两台飞轮或多台飞轮之间进行对拖充放电实验,即一台或某几台飞轮由额定转速放电,其它飞轮进行额定功率充电,待飞轮升至额定转速后再切换至放电状态,其它飞轮再进行充电,如此反复循环。电能和动能在飞轮之间进行反复流动,与电网无关,可以完成大功率充放电实验,节省电能以防电力资源浪费。本文即开展磁悬浮飞轮UPS系统对拖充放电实验方法研究,介绍系统组成及工作原理,搭建对拖平台并给出详细充放电实验过程。
1 磁悬浮飞轮动态UPS系统工作原理
1.1 UPS系统组成
如图1所示,磁悬浮飞轮UPS系统组成包括电网输入部分、电力电子整流及逆变器、飞轮电池单元、旁路模块等。其中,电网输入部分可由市电电网或者柴油发电机组提供380 V交流电能(或者600 V等级交流电压),市电电网作为正常供电来源,柴电机组作为市电断电而飞轮放电结束后的持续长时间供电来源。ATS(automatic transfer switching equipment)为电源自动转换开关,正常状态ATS与市电电网接通,市电断电时自动切换至柴电机组。预充回路、LCL滤波器、IGBT整流器和IGBT逆变器是通用的UPS电力电子装置。飞轮电池系统由双向变流器、交流电机、轮体等组成,其中,双向变流器的直流侧与IGBT整流器共用直流母线,飞轮电池完成能量转化均从直流侧进行。主旁路功能是当主路发生故障后直接将电网侧与主路输出连接,保证载荷不间断供电。维修旁路可将除ATS外的UPS设备短路,用于系统维修。
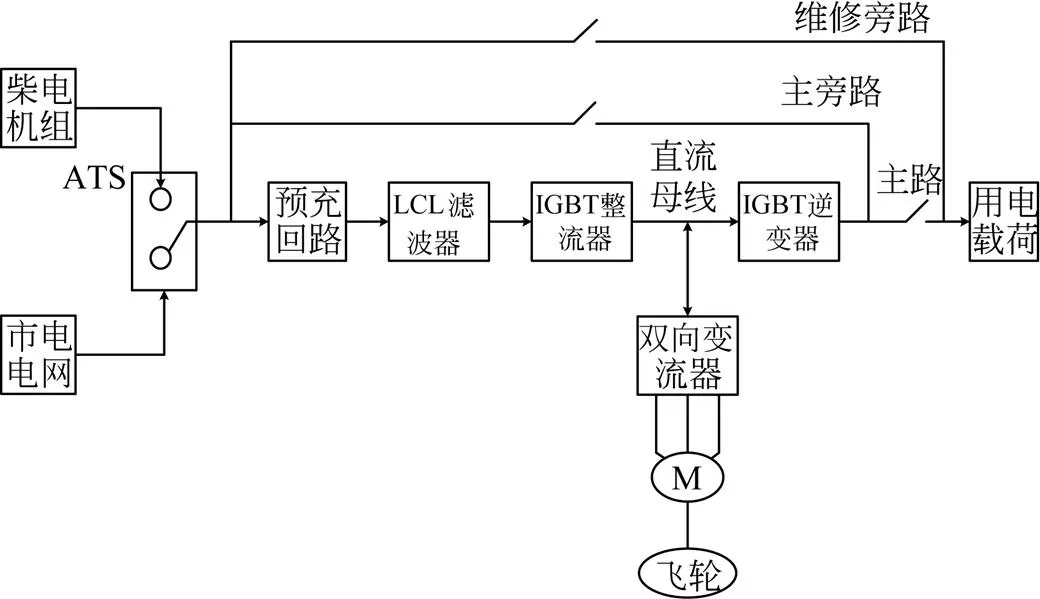
图1 磁悬浮飞轮动态UPS系统结构图
1.2 系统工作原理
当市电正常时,通过在线双变换式UPS结构(预充、滤波、IGBT整流)建立直流母线电压,一方面通过IGBT逆变供给负载,一方面接入飞轮系统使其充电至额定转速。当市电电压跌落至正常值的15%~20%时,直流母线电压同样发生跌落,飞轮检测到母线电压低于放电电压则迅速切换至发电状态。此时,能量由双向变流器回馈至直流母线侧维持电压稳定,一方面供应载荷供电,一方面给柴电机组发送启动信号并提供启动所需电源。此后,大约15~20 s柴电机组启动,ATS已由市电转由柴电机组供电,直流母线电压升高至正常值,负载转由柴电机组供电。飞轮检测到直流母线电压高于充电电压后,延时放电几秒后切换至充电状态,飞轮升至额定转速并待机保护。飞轮动态UPS需要保证市电到柴电机组供电的无缝切换,飞轮供电时间为秒级到分钟级,柴电机组可额定功率带载几个小时。
1.3 磁悬浮飞轮电池组成
如图2所示,磁悬浮储能飞轮本体由永磁同步电机定子、高速转子及永磁体、磁悬浮轴承、密封壳体、高压真空电极及备用保护轴承等组成。其中,永磁同步电机是储能飞轮的驱动机构,属于电动机和发电机一体结构,转子轴上安装永磁体用于建立主磁场,电机定子对外有三相真空电极与变流器连接。飞轮采用五自由度全悬浮电磁轴承,包括径向磁轴承(上径向和下径向)和轴向磁轴承(上轴向和下轴向),用于保持高速转子悬浮于腔体中心,与壳体之间零接触,无摩擦、无需润滑、噪声小且产热低。备用机械轴承用于静态转子承载,防止磁轴承与转子发生碰撞。密封壳体配置真空泵连接件,与真空泵配合保持腔体处于低气压状态,用于减小转子的空气摩擦,降低产热量和损耗。

图2 磁悬浮储能飞轮本体示意图
2 飞轮对拖充放电实验系统设计
2.1 硬件平台设计
基于上一节分析,飞轮UPS交流并网拓扑原理如图3所示。预充回路由主路三相交流接触器、辅路接触器和软启电阻组成,功能是给后级电路缓慢上电以抑制浪涌电流,通常电阻可选20 Ω,功率300 W左右。LCL滤波器由串联在主路的两组三相电感和并联的三组电容和电阻组成,可用于对输入电源进行滤波,同时是IGBT整流器的升压电路组成元件,其中,滤波器中电感、电容、电阻的选型需要根据系统容量而定。IGBT整流器和IGBT逆变器均由三相桥式IGBT开关管组成,交流回路中分别串接霍尔传感器用于测量网侧和负载侧的电压、电流信息。直流母线侧串联多组电容用于稳压、滤波,与电容并联多组电阻用于均衡分压。
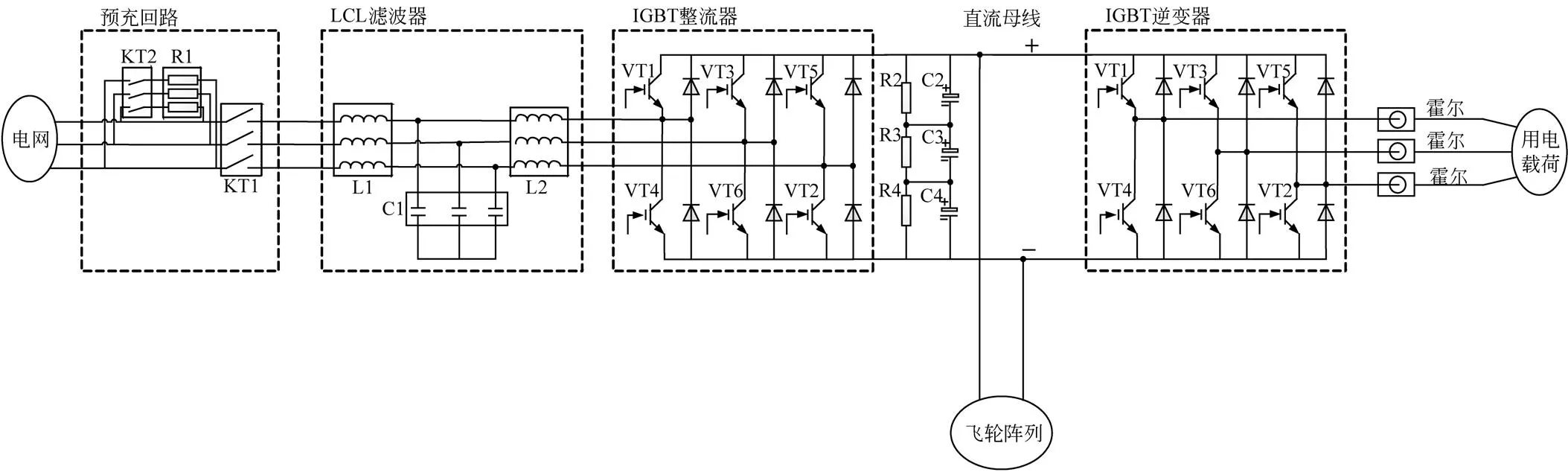
图3 飞轮UPS交流并网拓扑图
如图3所示,飞轮阵列系统并联于UPS直流母线电压网侧,依靠直流网侧完成能量转化。飞轮阵列系统拓扑原理如图4所示。其中,与UPS的整流器、逆变器类似,双向变流器同样为六组IGBT开关管组成的三相桥,为最小功率拓扑结构。所不同之处在于UPS的整流器始终处于整流状态,逆变器始终处于逆变状态,而飞轮的变流器在充电时处于逆变模式,在放电时为整流模式,而飞轮的充放电瞬态切换即通过控制这六组IGBT开关管由逆变模式切换至整流模式而实现。
对拖充放电过程:为了完成飞轮阵列之间的对拖充放电实验,需要对硬件平台按照一定的控制逻辑进行操作,具体操作步骤如下。



图4 飞轮阵列拓扑图
第五步 为了测试UPS装置的IGBT逆变器性能,可以调整飞轮1、2或3进行放电稳压,将IGBT逆变器开启并接入用电载荷,通过测试飞轮转速下降率换算动能释放量,同步监测负载侧电能消耗量,从而得到飞轮变流器及IGBT逆变器在带额定负载情况下的运行效率。
2.2 软件架构设计
为了实现飞轮对拖充放电实验,需要在原控制基础上进一步完善软件架构,包括独立的“充电控制”和“放电控制”接口,如图5所示。主控系统通过CAN总线分别于飞轮阵列连接,分别监测各飞轮状态数据并传送充放电控制指令。飞轮变流器已经固化自动充放电控制软件,同时开放优先级较高的中断接口与主控进行信息交互,即主控系统发送“充电控制”或“放电控制”指令,则飞轮屏蔽自动控制逻辑而执行主控指令。主控系统可由PC机构成,本系统自研基于Labview的充放电主控软件,如图5(b)所示。
飞轮阵列进行对拖充放电实验,需要各单元具备自动充放电控制功能,主程序、定时器中断函数流程等如图6所示。主程序完成寄存器及变量初始化、开启中断、主循环及等待中断等。定时器中断完成主控CAN总线指令查询、解析及飞轮充放电控制逻辑切换。
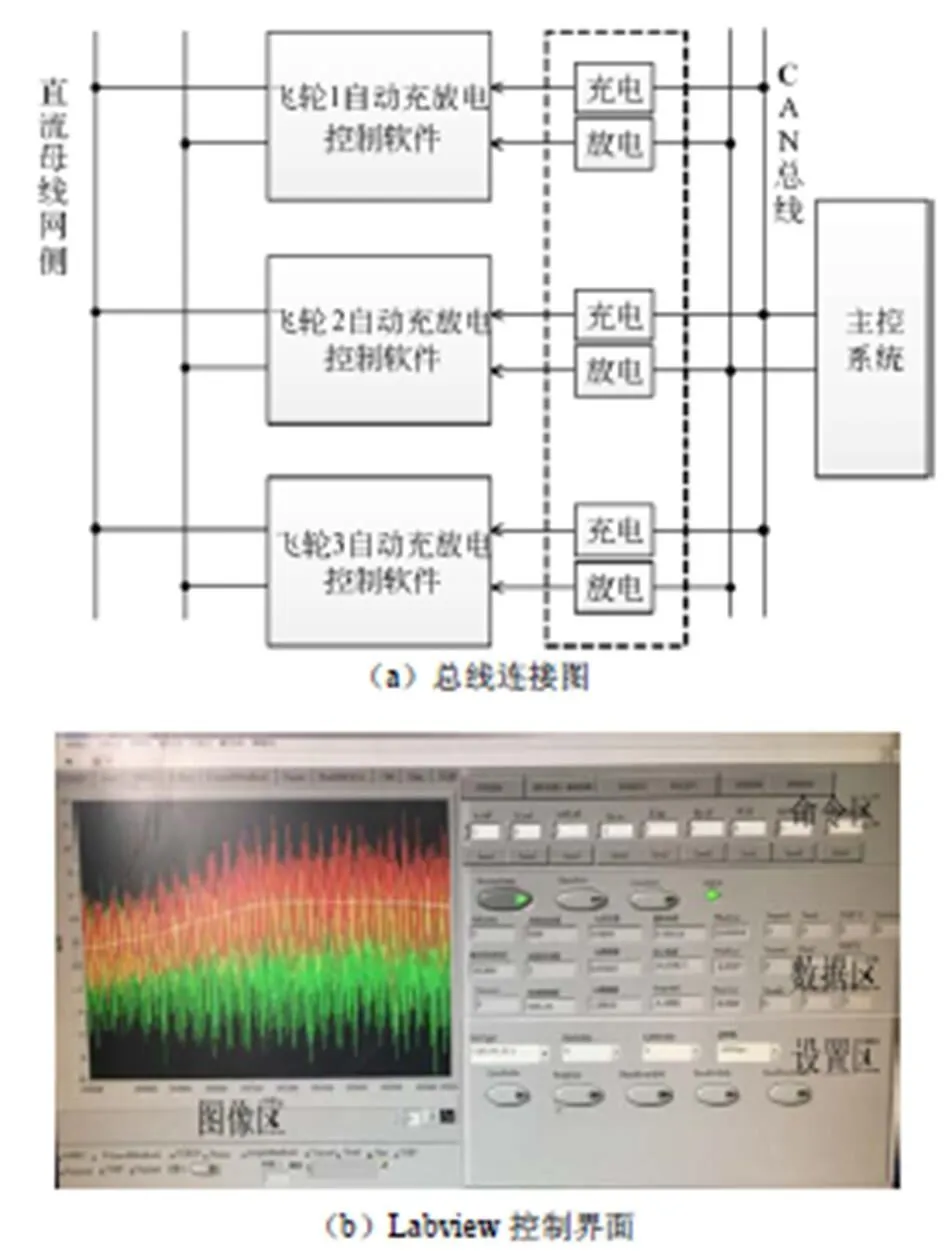
图5 飞轮充放电控制总线接口
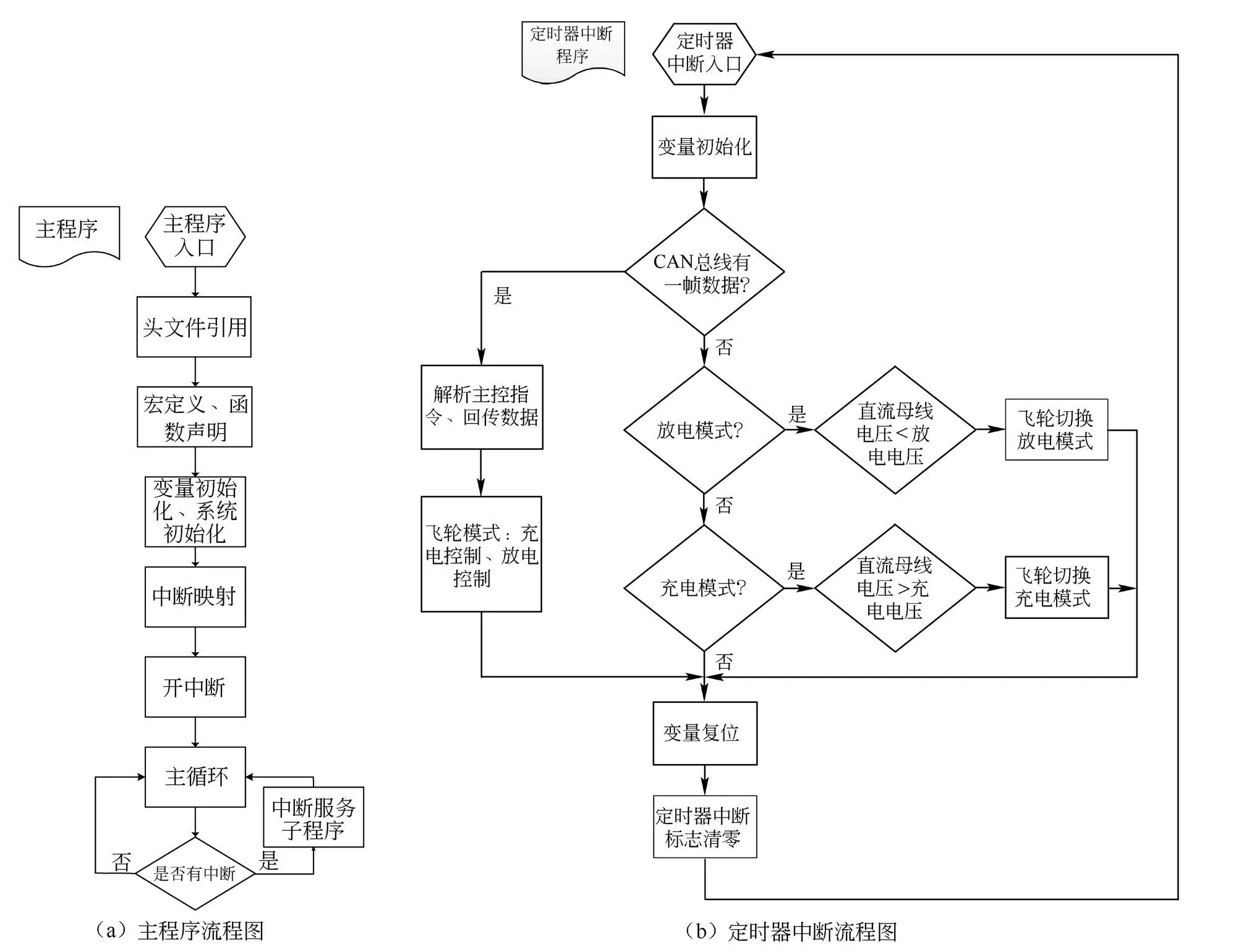
图6 飞轮充放电控制软件流程图
3 磁悬浮飞轮动态UPS实验装置及参数
本文以自研的磁悬浮飞轮UPS为对象进行飞轮对拖充放电实验设计,实验装置如图7所示,飞轮主控界面如图8所示,系统参数如表1所示。其中,单机飞轮容量250 kVA,实验用3~4台单机组成容量750 kVA~1 MVA飞轮阵列,而实际电网容量仅有150 kVA左右,无法满足飞轮阵列容量要求,采用本文所设计的飞轮对充放电控制可实现飞轮阵列满载功率充放电实验。

图7 磁悬浮飞轮动态UPS实验装置

图8 磁悬浮飞轮主控界面

表1 飞轮UPS系统参数
4 结 论
本文针对磁悬浮飞轮动态UPS系统对拖充放电实验测试方法展开研究,重点解决由于电网容量受限而无法实现飞轮阵列满载充放电控制的问题。文中首先给出了飞轮动态UPS系统组成及工作原理,在此基础上详细介绍了飞轮交流并网拓扑结构及飞轮阵列系统原理。在对拖充放电控制系统设计中,重点介绍飞轮硬件平台搭建与软件框架重构,实验过程包括飞轮阵列小功率充电、UPS整流器封锁、飞轮阵列对充对放电控制等,涵盖整个实验所需的逻辑控制、软件界面以及操作流程。最后,给出了磁悬浮飞轮动态UPS实验装置和系统参数,为后续进一步验证对拖充放电实验性能提供基础。
[1] 戴兴建, 邓占峰, 刘刚, 等. 大容量先进飞轮储能电源技术发展状况[J]. 电工技术学报, 2011, 26(7): 133-140.
DAI Xingjian, DENG Zhanfeng, LIU Gang, et al. Review on advanced flywheel energy storage system with large scale[J]. Transactions of China Electrotechnical Society, 2011, 26(7): 133-140.
[2] 戴兴建, 张小章, 姜新建, 等. 清华大学飞轮储能技术研究概况[J]. 储能科学与技术, 2012, 1(1): 64-68.
DAI Xingjian, ZHANG Xiaozhang, JIANG Xinjian, et al. Flywheel energy storage technology in Tsinghua University[J]. Energy Storage Science and Technology, 2012, 1(1): 64-68.
[3] 陈亚爱, 甘时霖, 周京华, 等. 飞轮储能技术[J]. 电源技术, 2016, 40(8): 1718-1721.
CHEN Ya’ai, GAN Shilin, ZHOU Jinghua. Energy storage technology of flywheel[J]. Power Technology, 2016, 40(8): 1718-1721.
[4] 薛小川, 王志强. 磁悬浮储能飞轮振动状态研究[J]. 自动化仪表, 2017, 38(7): 89-94.
XUE Xiaochuan, WANG Zhiqiang. Study on the vibration condition monitoring for magnetic levitation energy storage flywheel[J]. Process Automation Instrumentation, 2017, 38(7): 89-94.
[5] 李树胜, 刘平, 付永领, 等. 磁悬浮储能飞轮永磁同步电机干扰特性分析及监测方法研究[J]. 储能科学与技术, 2018: doi: 10.12028/j.issn.2095-4239.2017.0157.
LI Shusheng, LIU Ping, FU Yongling, et al. Research on disturbance analysis and detection method for the magnetically suspended flywheel-based PMSM system[J]. Energy Storage Science and Technology, 2018: doi: 10.12028/j.issn.2095-4239.2017.0157.
[6] 张超平, 戴兴建, 苏安平, 等. 石油钻机动力系统飞轮储能调峰试验研究[J]. 石油机械, 2013, 41(5): 3-6.
ZHANG Chaoping, DAI Xingjian, SU Anping, et al. Experimental study of flywheel energy storage and peak regulation of rig power system[J]. China Peroleum Machinery, 2013, 41(5): 3-6.
[7] 魏鲲鹏, 汪勇, 戴兴建. 飞轮储能系统在风力发电中应用研究进展[J]. 储能科学与技术, 2015, 4(2): 141-146.
WEI Kunpeng, WANG Yong, DAI Xingjian. Review of flywheel energy storage system for wind power applications[J]. Energy Storage Science and Technology, 2015, 4(2): 141-146.
[8] 毕文俊. 基于飞轮储能的地铁再生制动能量利用研究[D]. 成都: 西南交通大学, 2016.
BI Wenjun. The study of subway braking energy utilization based on flywheel energy storage[D]. Chengdu: Southwest Jiaotong University, 2016.
[9] TOMMASO A, ADA F, MARCO M, et al. Distribute UPS control systems reliability analysis[J]. Measurement, 2017, 110: 275-283.
[10] 于玮, 徐德鸿, 周朝阳. 并联UPS系统均流控制[J]. 中国电机工程学报, 2008, 28(21): 63-67.
YU wei, XU Dehong, ZHOU Chaoyang. Control strategy of paralleled UPS system[J]. Proceedings of the CSEE, 2008, 28(21): 63-67.
[11] 韩峰, 王代华. 分布式UPS蓄电池远程监测系统[J]. 现代电子技术, 2018, 41(8): 163-168.
HAN Feng, WANG Daihua. Distribute remote online monitoring for UPS battery[J]. Modern Electrical Technology, 2018, 41(8): 163-168.
[12] 刘海. 德国PILLER动态UPS简介[J]. 军民两用技术与应用, 2004 (6): 7-8.
LIU Hai. Introduction of Germany PILLER dynamic UPS[J]. Aerospace Technology and Civilian Products, 2004(6): 7-8.
[13] 李树胜, 付永领, 刘平, 等. 磁悬浮飞轮储能UPS系统集成应用及充放电控制方法研究[J]. 中国电机工程学报, 2017, 37(1): 170-176.
LI Shusheng, FU Yongling, LIU ping, et al. Research on integrated application and charging-discharging control method for the magnetically suspended flywheel storage-based UPS system[J]. Proceedings of the CSEE, 2017, 37(1): 170-176.
[14] WANG Gengji, WANG Ping. Rotor loss analysis of PMSM in flywheel energy storage system as uninterruptable power supply[J]. IEEE Transactions on Applied Superconductivity, 2017, 26(7): 1-7.
[15] LI Shusheng, FU Yongling, LIU Ping. Research on problem of the transient charging-discharging switching for the magnetically suspended flywheel-based PMSM system[J]. Sensors, 2018, 18(8): 1-17.
Research on twin trawling charging-discharging experimental method for the magnetically suspended flywheel-based dynamic UPS system
LI Shusheng1,4., FU Yongling1, LIU Ping2, DAI Xingjian3, LI Yunlong4
(1Beijing University of Aeronautics and Astronautics, Beijing 100191, China;2Power China Road Bridge Group Co., Ltd., Beijing 100048, China;3Tsinghua University, Beijing 100084, China;4Beijing Honghui International Energy Technology Development Co., Beijing 101300, China)
The configuration and operational principle of the flywheel-based dynamic UPS is introduced firstly, and the AC interconnection topology and structure of the flywheel array are analyzed. The research on the twin trawling charging-discharging experimental method of the flywheel array is presented to solve the problem of the limited power grid capacity and the waster of energy. With the established of the hardware platform, the DC interconnection control logic and the software construction are designed as well the detailed real twin trawling charging-discharging operation processing is presented. Finally, the experimental equipment and the parameters of the magnetically suspended flywheel-based dynamic UPS is described.
magnetically suspended flywheel energy storage system; dynamic UPS; twin trawling charging-discharging control
10.12028/j.issn.2095-4239.2018.0099
TM 341
A
2095-4239(2018)05-828-06
2018-06-20;
2018-06-28。
国家重点研发计划项目(2018YFB0905500),第61批中国博士后科学基金(2017M610735)。
李树胜(1986—),男,博士后,研究方向为大功率磁悬浮储能飞轮充放电控制,E-mail:lss123048@163.com。
猜你喜欢
通信电源技术(2022年7期)2022-08-17
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
科学与财富(2020年32期)2020-03-10
通信电源技术(2020年1期)2020-02-20
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
中国自行车(2017年11期)2017-04-04
