
磁悬浮飞轮储能系统中电机干扰特性分析及监测方法研究
2018-09-21 06:21李树胜付永领王志强
储能科学与技术 2018年5期
李树胜,付永领,刘 平,王志强
磁悬浮飞轮储能系统中电机干扰特性分析及监测方法研究
李树胜1,3,付永领1,刘 平2,王志强3
(1北京航空航天大学,北京 100191;2中电建路桥集团工程设计研究院有限公司,北京 100048;3北京泓慧国际能源技术发展有限公司,北京 101300)
本文基于飞轮三相永磁同步电机的特性,研究影响飞轮电机控制性能的干扰因素并对其特性进行分析。首先建立动基座条件下飞轮转子的动力学模型,在此基础上对影响电机性能的内外多源干扰进行建模和特性分析,给出详细的干扰模型以及所包含的结构类型。针对干扰所必需的输入参数,设计并实现了飞轮干扰状态的监测系统,获取飞轮实时转速、磁偏转角和基座振动等信息。最后,给出磁悬浮储能飞轮系统实验装置和飞轮参数,为飞轮电机干扰特性验证和干扰抑制方法提供必要基础。
磁悬浮储能飞轮;永磁同步电机;干扰状态监测系统
磁悬浮飞轮储能[1-5](magnetically suspended flywheel energy storage system,MSFESS)是近几年新兴的机械储能技术,与传统储能方式(化学电池储能、压缩控制储能、抽水蓄能、超导储能、超级电容储能等)相比,具有充放电迅速、储能密度高、功率大、效率高、寿命长、放电深度高、环境污染 小、易于维护等优点,可广泛应用于轨道交通制动能回收、电力系统调峰、UPS不间断电源、石油钻井功率补偿、大功率电磁弹射等领域[6-10]。目前,国外对飞轮储能技术的研究开展较早而且推出一系列产品,如美国Vycon、Active Power,德国Piller等[11-13],而国内对飞轮储能技术的研究多集中于高校且没有成熟产品。
高速永磁同步电机(permanent magnet synchronous motor,PMSM)转速从几万转到十几万转,具有功率密度大、几何尺寸小、重量轻、响应快等优 点[14-18],是驱动飞轮储能高速旋转的理想机构。当市电接通或外界能量过激时,永磁同步电机运行于电动状态,驱动飞轮转子高速旋转,电能转化为机械能进行存储;当市电掉电或外界能量不足时,永磁同步电机切换至发电状态,飞轮转子降速并将机械能转化为电能,以保持用电载荷高品质不间断供电。从而可知,永磁同步电机的控制品质直接决定了飞轮充放电的控制性能,是整个飞轮储能技术研究的重点和难点之一。
但是在实际应用中,飞轮永磁同步电机受到多源干扰的影响,包括内部干扰和外部干扰两个方面。内部干扰主要有转子动力学耦合、空气摩擦阻力、电机反电势以及磁悬浮系统的磁偏拉力等;外部干扰主要是动基座耦合以及壳体模态等。这些干扰因素具有高阶多模、非线性、非高斯等特性,直接作用在永磁电机控制回路中,对电机的控制性能影响较大,严重情况可导致系统稳定性下降甚至失效。因此,对这些干扰因素进行建模和特性分析是抑制干扰的首要问题。
国内外学者对飞轮干扰的研究多集中于转子的模态和振动特性[19-21],对永磁同步电机的研究多集中于单机模型和静态干扰[22-24],而对于考虑动基座情况下飞轮永磁同步电机多源干扰的研究较少,同时难以给出详细的模型和特性分析。本文针对这个问题,通过建立动基座情况下的飞轮转子动力学模型,分别对影响电机控制性能的干扰因素进行建模和特性分析,并针对所要测量的输入参数建立一种系统监测方法并给出实际运行流程,为实现飞轮高精度充放电控制提供模型输入和监测措施。
1 磁悬浮飞轮系统模型
1.1 飞轮转子动力学模型
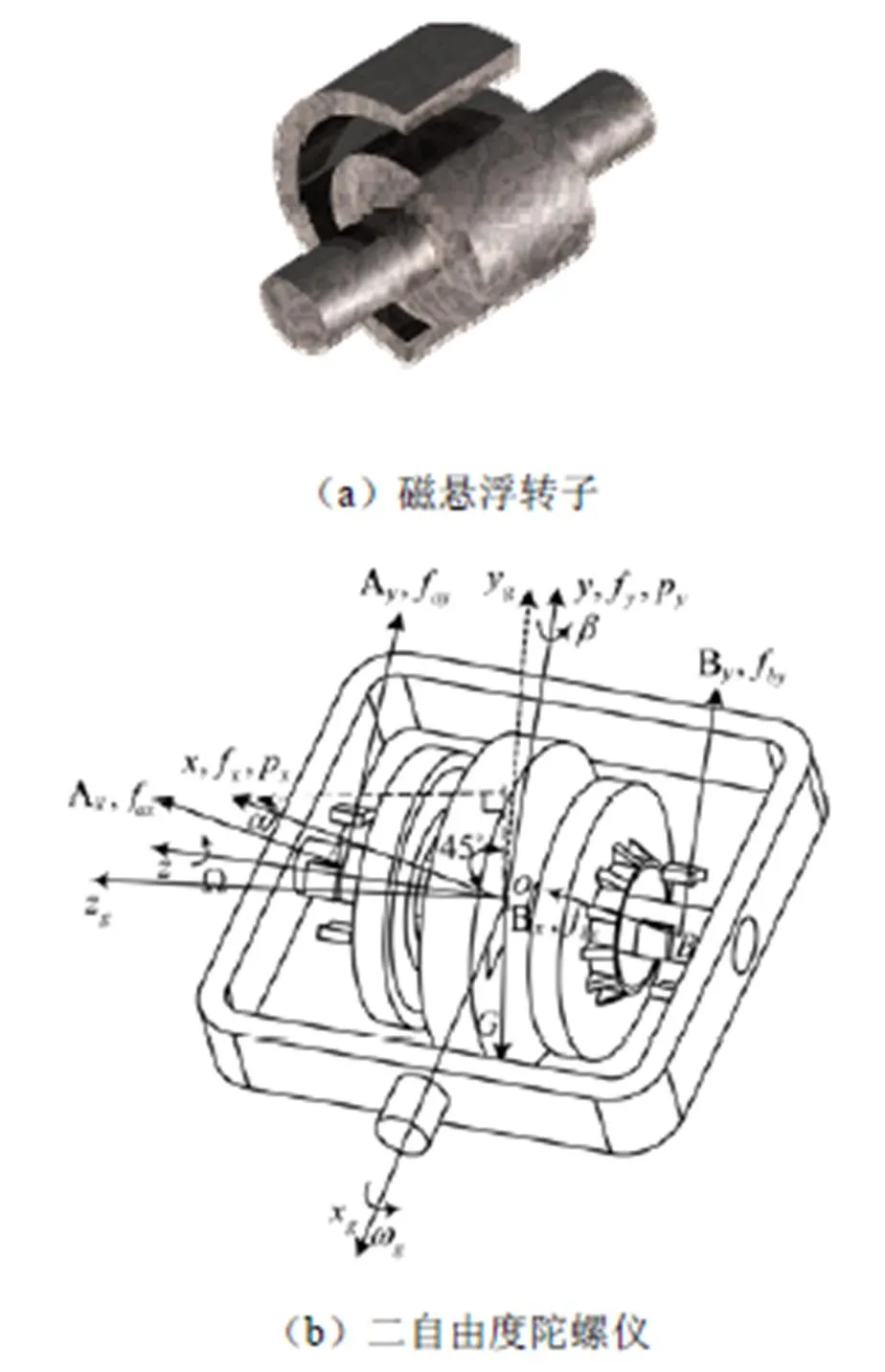
如图1所示,磁悬浮储能飞轮由永磁同步电机、高速转子、永磁体、五自由度全电磁轴承、高压真空电极、备用轴承和密封壳体等组成。其中,永磁同步电机由定子和永磁体组成,用于驱动高速转子旋转,完成电能-动能-电能的高效率转换;电磁轴承由径向和轴向磁轴承组成,用于保持转子径向和轴向的全悬浮状态;备用轴承用于保护磁轴承,防止转子跌落损坏磁轴承;密封壳体用于固定组件且保持内部处于真空状态。
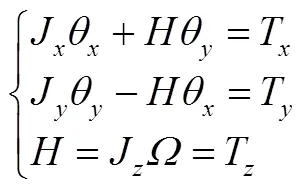
由于磁悬浮飞轮转子与壳体之间存在间隙,而电磁轴承实现悬浮控制时转子与壳体之间始终存在相对运动,如图2所示。在外部动基座或磁轴承磁偏拉力的作用下,飞轮转子相对径向和轴向都存在一定的角运动。因此,磁悬浮飞轮动力学模型可以看作一个二自由度框架陀螺仪,该陀螺的内环和外环实体实际上并不存在,称之为虚拟内环和虚拟外环。

图1 磁悬浮储能飞轮内部结构示意图
经过推导并忽略小量,得到二自由度陀螺仪的动力学方程见式(1)[26]

1.2 永磁同步电机数学模型
基于高速旋转时的转子强度问题,飞轮电机普遍采用表贴式永磁同步电机(surface-mounted PMSM,SPMSM),永磁体外侧采用高强度护套紧固。SPMSM在三相静止、、坐标系下的电压方程见式(3)[25]。

对于传统的矢量控制结构,通常将三相静止、、坐标系转换为两相同步旋转、坐标系,将电机励磁分量与有效转矩分量进行分开实现高精度解耦控制。SPMSM在、坐标系下的电压和转矩方程见式(4)[25]
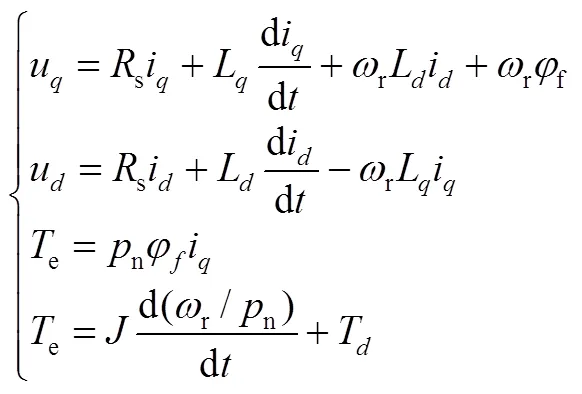

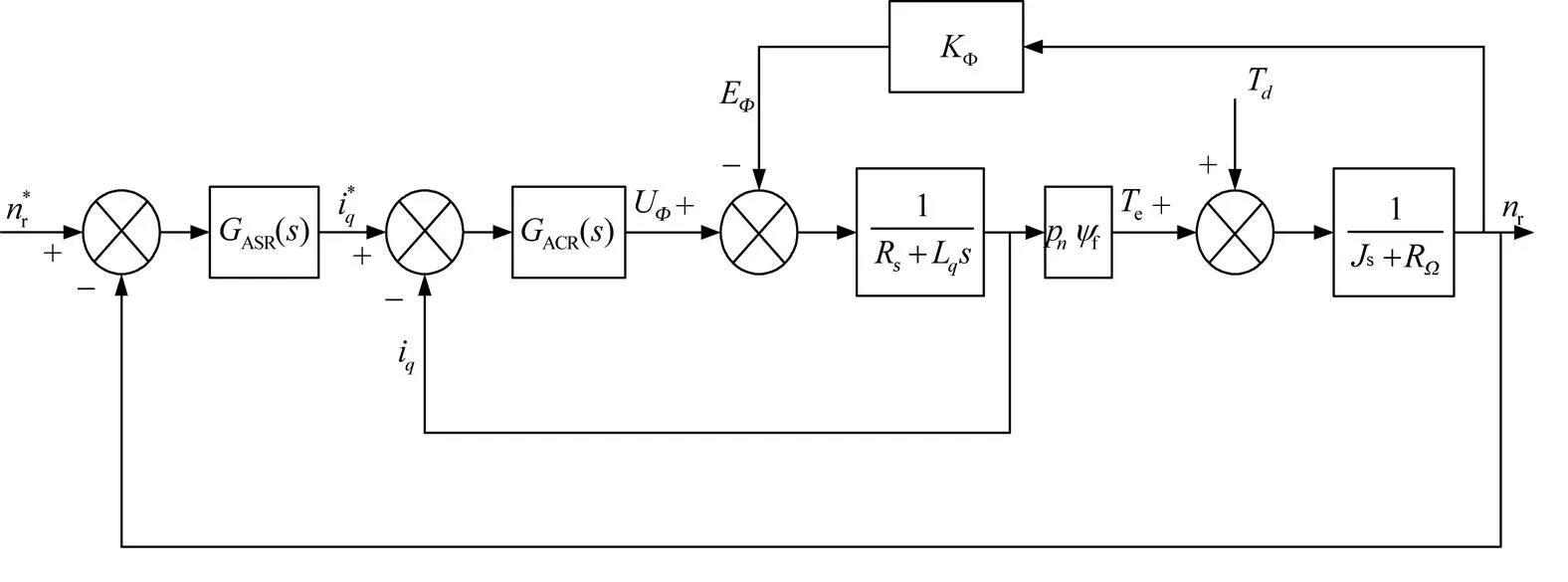
图3 调速系统双环动态结构图
2 干扰力矩特性分析
2.1 质量不平衡力矩

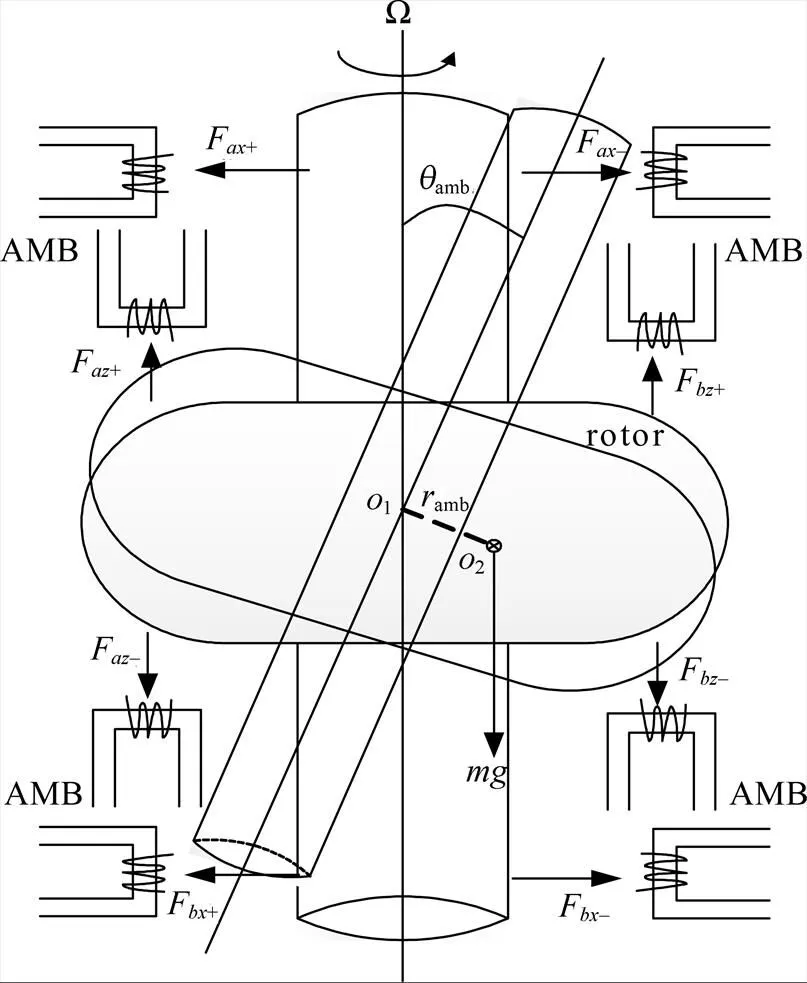
图4 质量不平衡力矩示意图



因此,电机所受转子质量不平衡力矩表达式中包含常量部分和正弦、余弦部分,而且不确定部分是飞轮转速的函数,呈现是一种非线性特性组合 形式。
2.2 电机反电势
对于高速交流永磁同步电机而言,电机反电势是不容忽视的干扰因素。如图3所示,电机等效反电势表达式见式(7)
将式(7)代入式(8),可得
2.3 空气摩擦阻力矩
当飞轮高速旋转时,空气摩擦阻力矩是不可避免的,其特性与飞轮转速大小直接相关。为了减小空气摩擦损耗,飞轮系统需配置抽真空装置,以保持飞轮腔内气压低于一定水平,所用真空装置如图5所示。同时,外壳采用一定的密封工艺:壳体刚性部件采用高压焊接密封,活动部件(如航空插头、顶盖等)采用O型圈进行密封。
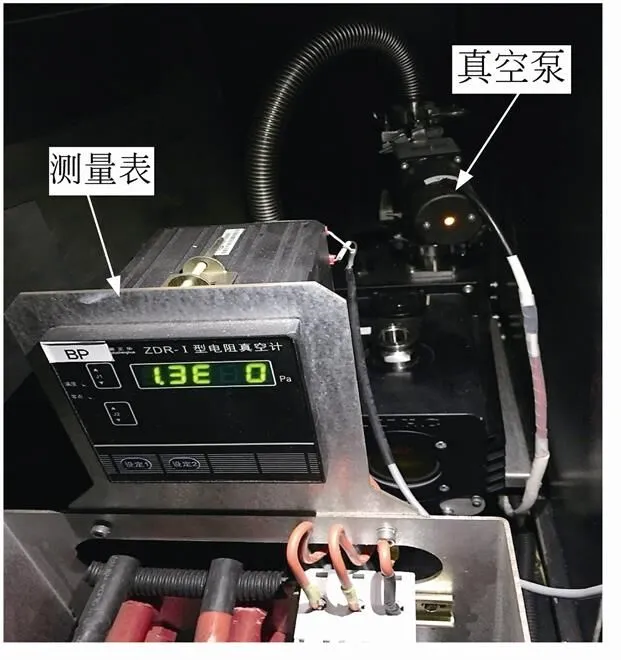
图5 飞轮真空装置
对于大功率磁悬浮飞轮系统,所采用的真空装置功率有限,一般可将腔内气压抽至1~10 Pa水平,而且腔内转子结构不对称,上下左右几个面空气分子数量不同,难免引入空气对流。因此,在飞轮高速旋转时,由空气摩擦阻力引入的损耗同样不可忽视,而对电机沿轴向旋转引入的干扰力矩需要进行建模分析。
从查阅文献可知[27-28],对于运动物体其所受空气阻力大小是运动速度的二次方多项式,即

对于飞轮转子而言,其直径较大,沿圆周方向的切向速度是飞轮转速和转子半径的线性关系,如图6所示。
飞轮转子切向速度表达式见式(11)
将式(11)代入式(10)可得

基于此,沿飞轮转子整个圆周方向的空气阻力矩是空气阻力在半径方向的积分,其表达式为
从式(13)可以看出,飞轮转子沿旋转方向所受空气阻力矩是飞轮转速的二次多项式组合形式,阻力矩大小取决于剩余空气压力,其动态特性取决于飞轮转速。
基于以上所述,在考虑动基座或磁悬浮系统磁偏拉力情况下,飞轮电机所受干扰力矩包括动力学耦合力矩、质量不平衡力矩、电机反电势力矩和空气摩擦阻力矩等,其表达式如下

3 飞轮电机干扰特性监测系统设计
从上一节可以看出,飞轮永磁电机所受干扰力矩与飞轮转速、磁轴承拉力偏角、基座振动特性等有关,为了得到这些干扰力矩的特性,需要建立一套飞轮干扰特性监测系统,能够实现对飞轮转速、磁轴承偏角和基座振动的实时监控。下文分别对监测系统进行设计。
3.1 飞轮转速监测系统
飞轮转速是电机控制的关键指标,也是干扰因素的主要输入参数。为了获得飞轮转速的准确值,在飞轮转子轴末端加装旋转变压器转子,其定子固定于飞轮壳体,用于获取原始的转速信号,再经过RDC解码电路,将其转化为三路标光电编码器脉冲信号,采用数字信号处理器(digital signal processor,DSP)的eQEP单元进行信号采集,最终得到飞轮转速。旋转变压器安装位置如图7所示,其信号采集过程如图8所示。
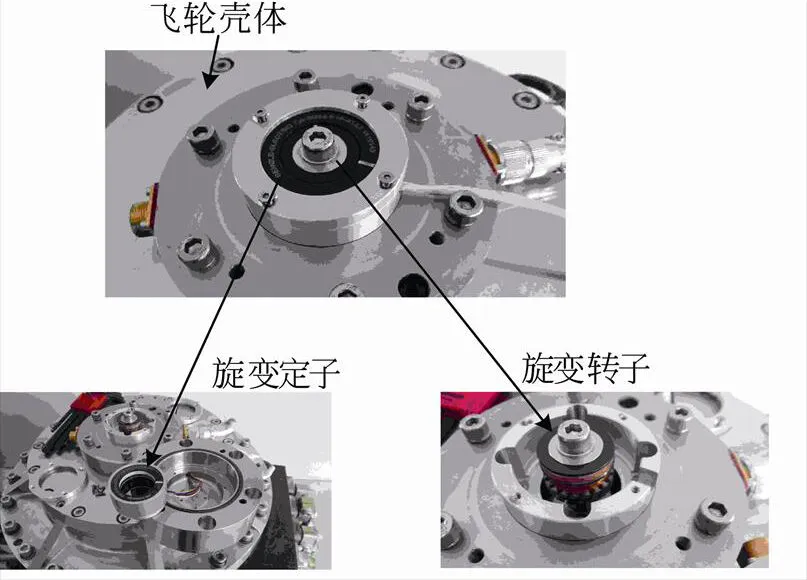
图7 旋转变压器安装位置示意图

图8 旋转变压器信号采集、解码逻辑示意图
如图8所示,旋转变压器原始信号为一组正弦和余弦信号,经过解码电路RDC后转化为三路差分脉冲信号:A+、A-、B+、B-、Z+、Z-,其中A相与B相相位差90°用于判断电机旋转方向,Z相每周产生一组电平信号用于复位逻辑系统。将三路脉冲信号经过差分转电路信号电路后输入至DSP的eQEP单元进行采集,可以获得飞轮转子的实时角位置和角速度。
3.2 磁轴承拉力偏角监测系统
对于磁悬浮储能飞轮而言,磁悬浮系统是独立于电机控制的飞轮子系统,具备专用的磁轴承电磁系统和电力驱动系统,内置电涡流位移传感器可以实时监测转子与传感器之间的位移量。电涡流位移传感器安装示意图如图9所示。
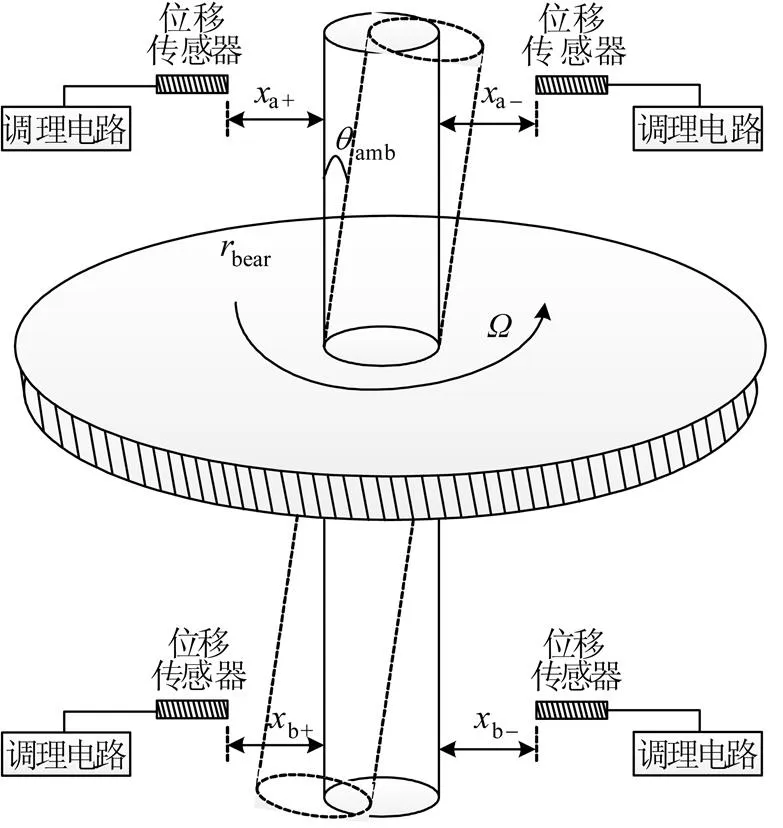
图9 磁轴承位移传感器安装示意图

基于磁轴承位移传感器信号可以得到飞轮转子实时偏角,软件系统采用Labview编译环境进行在线绘图,如图10所示。图10(a)和图10(b)分别为上径向和下径向位移传感器,横轴和纵轴分别为数字位移量,取值范围±2048代表±3 mm,图10(c)为轴向位移传感器,横轴为时间,纵轴为位移量。其中,圆周表示传感器边缘,中心点表示飞轮转子位置,当中心点与圆周中心重合时,表示飞轮转子处于中心悬浮状态。
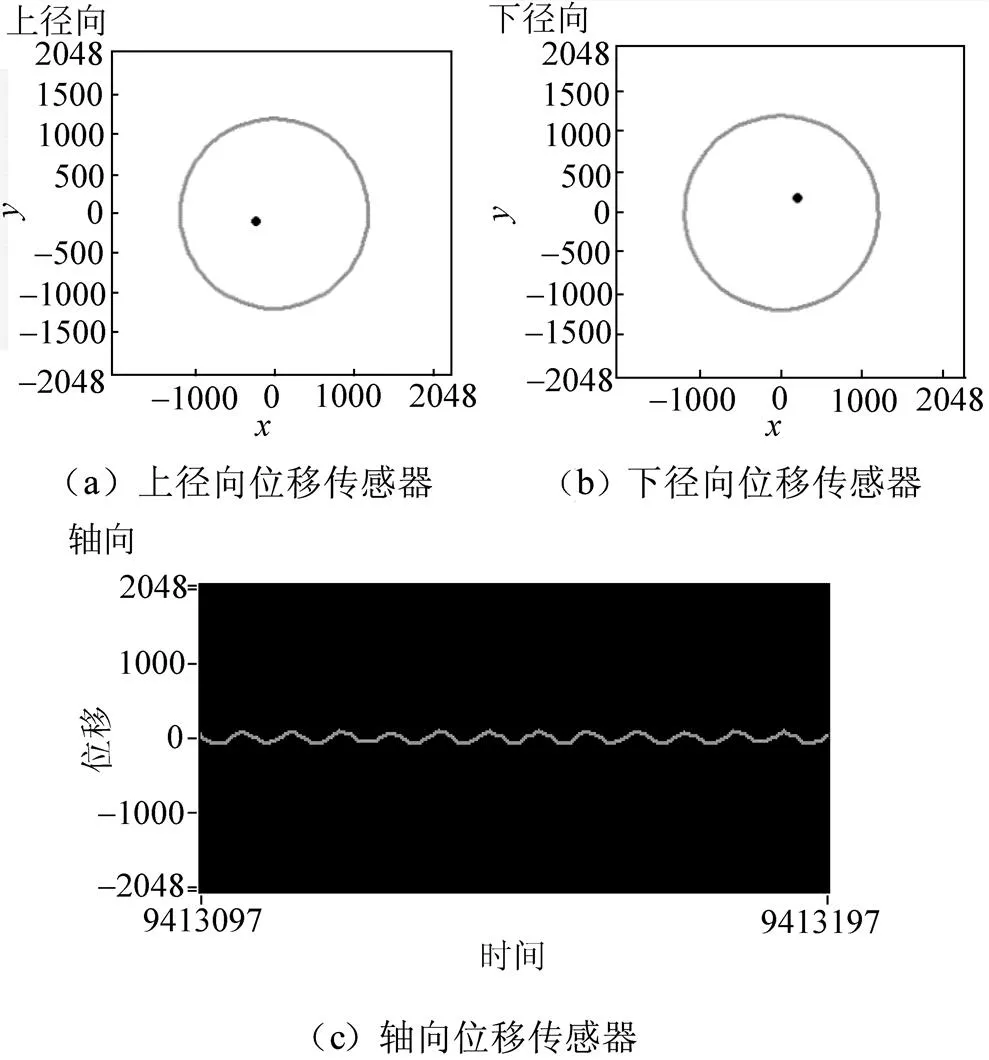
图10 磁悬浮位移传感器实时监测曲线
3.3 基座振动监测系统
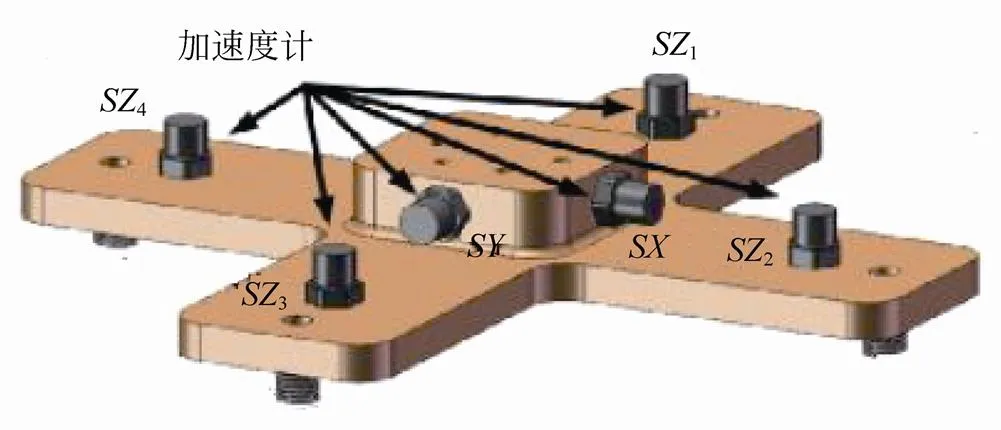
图11 基座加速度传感器安装示意图
硬件采集系统采用NI公司的数据板卡PCI-6255,具有较高的分辨率和灵敏度,其硬件系统连接如图12所示。

图12 加速度传感器信号采集示意图
4 磁悬浮储能飞轮实验装置及参数
本文在北京航空航天大学、北京泓慧国际能源技术发展有限公司以及中电建路桥集团工程设计研究院有限公司支持下,以自研的大功率磁悬浮储能飞轮为实验对象给出了详细的分析报告,实验装置如图13所示。
磁悬浮储能飞轮系统包括飞轮本体、充放电变流器、磁悬浮控制系统、真空系统以及主控屏幕系统。所有系统均正常工作才可实现飞轮正常的充放电控制,其中主控屏幕显示界面如图14所示,飞轮参数如表1所示。

图13 磁悬浮储能飞轮实验装置
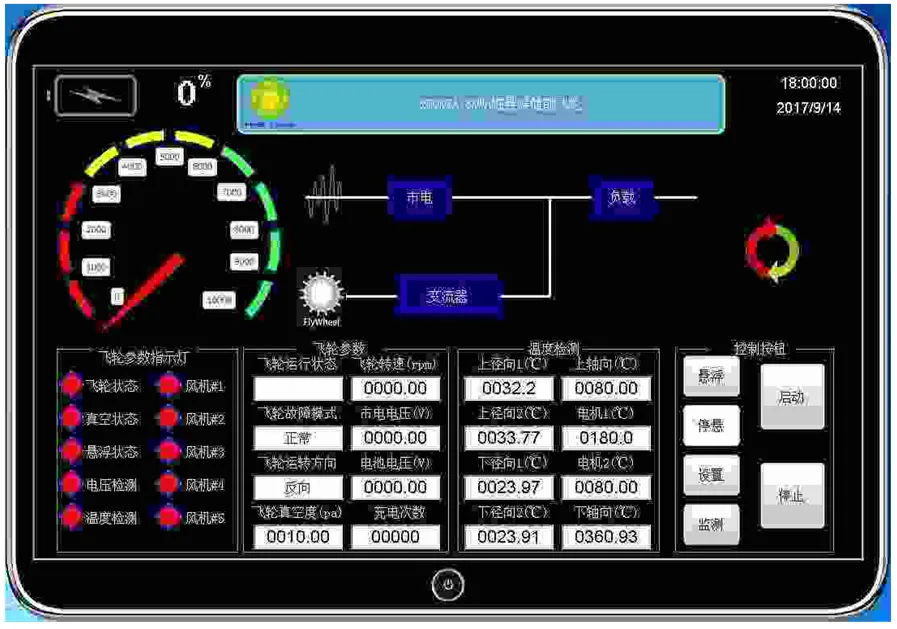
图14 主控屏幕人机界面
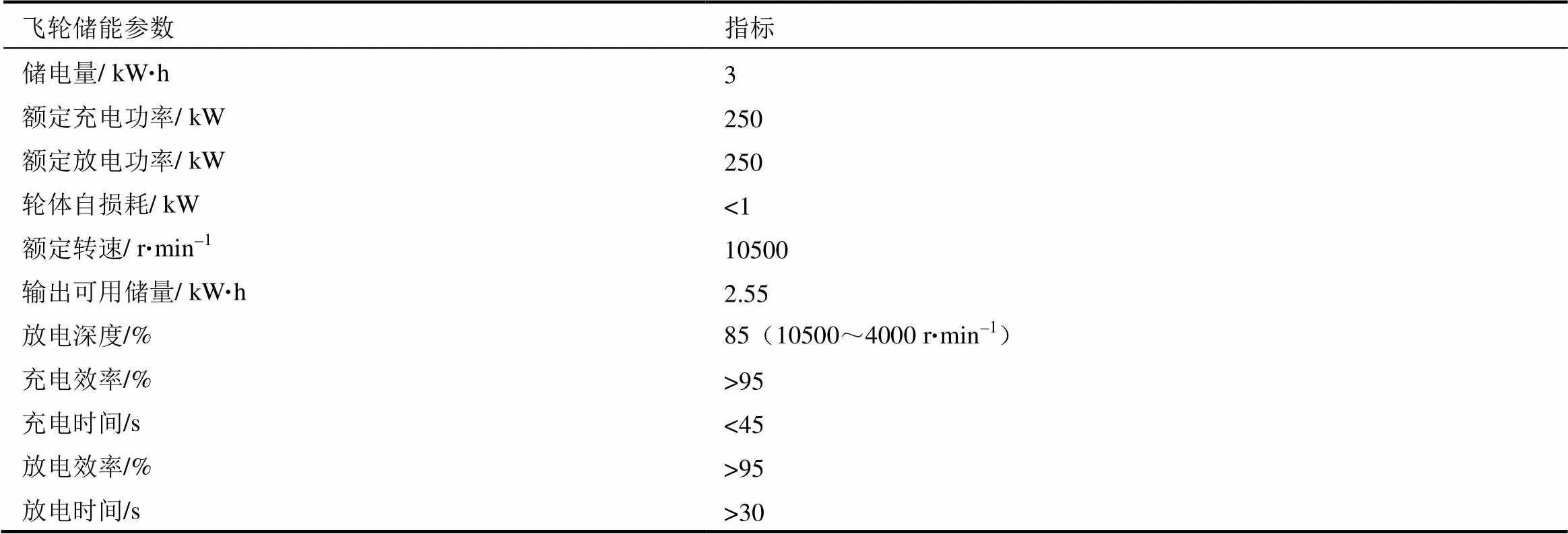
表1 飞轮储能系统参数
5 结 论
本文针对磁悬浮储能飞轮永磁同步电机干扰特性建模及监测方法展开研究。针对储能飞轮的特殊性,考虑动基座条件下飞轮电机所受干扰因素进行建模分析,并对其模型所包含的函数特性进行分类。对电机影响较大的干扰力矩包括动力学耦合力矩、质量不平衡力矩、磁轴承磁偏拉力、空气摩擦阻力矩以及电机反电势力矩等,对其产生机理和模型特性进行了详细介绍。设计并实现了一种干扰状态监测系统,对飞轮转速、转子偏角和基座振动信息等进行实时信号采集、处理和显示。最后,给出了磁悬浮储能飞轮实验装置和飞轮参数,为后续开展干扰补偿方法提供基础。
[1] 戴兴建, 邓占峰, 刘刚, 等. 大容量先进飞轮储能电源技术发展状况[J]. 电工技术学报, 2011, 26(7): 133-140.
DAI Xingjian, DENG Zhanfeng, LIU Gang, et al. Review on advanced flywheel energy storage system with large scale[J]. Transactions of China Electrotechnical Society, 2011, 26(7): 133-140.
[2] 戴兴建, 张小章, 姜新建, 等. 清华大学飞轮储能技术研究概况[J]. 储能科学与技术, 2012, 1(1): 64-68.
DAI Xingjian, ZHANG Xiaozhang, JIANG Xinjian, et al. Flywheel energy storage technology in Tsinghua University[J]. Energy Storage Science and Technology, 2012, 1(1): 64-68.
[3] 王传东. 飞轮电池发展研究[J]. 电源技术, 2014, 38(7): 1402-1403.
WANG Chuandong. Development of flywheel battery[J]. Power Technology, 2014, 38(7): 1402-1403.
[4] 陈亚爱, 甘时霖, 周京华, 等. 飞轮储能技术[J]. 电源技术, 2016, 40(8): 1718-1721.
CHEN Yaai, GAN Shilin, ZHOU Jinghua. Energy storage technology of flywheel[J]. Power Technology, 2016, 40(8): 1718-1721.
[5] 刘付成, 李结冻, 李延宝, 等. 磁悬浮储能飞轮技术研究及应用示范[J]. 上海节能, 2017(2): 80-84.
LIU Fucheng, LI Jiedong, LI Yanbao, et al. Research and application demonstration of maglev energy storage flywheel technology[J]. Shanghai Energy Conservation, 2017(2): 80-84.
[6] 毕文俊. 基于飞轮储能的地铁再生制动能量利用研究[D]. 成都: 西南交通大学, 2016.
BI Wenjun. The study of subway braking energy utilization based on flywheel energy storage[D]. Chengdu: Southwest Jiaotong University, 2016.
[7] 李树胜, 付永领, 刘平, 等. 磁悬浮飞轮储能UPS系统集成应用及充放电控制方法研究[J]. 中国电机工程学报, 2017, 37(1): 170-176.
LI Shusheng, FU Yongling, LIU ping, et al. Research on integrated application and charging-discharging control method for the magnetically suspended flywheel storage-based UPS system[J]. Proceedings of the CSEE, 2017, 37(1): 170-176.
[8] 张超平, 戴兴建, 苏安平, 等. 石油钻机动力系统飞轮储能调峰试验研究[J]. 石油机械, 2013, 41(5): 3-6.
ZHAO Chaoping, DAI Xingjian, SU Anping, et al. Experimental study of flywheel energy storage and peak regulation of rig power system[J]. China Peroleum Machinery, 2013, 41(5): 3-6.
[9] 魏鲲鹏, 汪勇, 戴兴建. 飞轮储能系统在风力发电中应用研究进展[J]. 储能科学与技术, 2015, 4(2): 141-146.
WEI Kunpeng, WANG Yong, DAI Xingjian. Review of flywheel energy storage system for wind power applications[J]. Energy Storage Science and Technology, 2015, 4(2): 141-146.
[10] 李然. 飞轮储能技术在电力系统中的应用和推广[J]. 电气时代, 2017: 40-42.
LI Ran. Application of flywheel energy storage system in power system[J]. The Age of Electricity, 2017: 40-42.
[11] CALNETIX TECHNOLOGIES. Vycon direct connect kinetic energy storage systems[EB/OL]. USA, 2016. http://www.Calnetix.com/.
[12] ACTIVE POWER. Clean source xt ups single module systems [EB/OL]. USA, 2017. http://www.activepower.com/en-US/ documents/ 3974/cleansource-xt250-ups-en.pdf.
[13] HEADQUARTERS. Piller power systems[EB/OL]. Germany, 2017. http://www.piller.com/en-GB/documents/552/apostar-static-ups-brochure-en.pdf.
[14] 鲍海静, 梁培鑫, 柴凤. 飞轮储能用高速永磁同步电机技术综述[J]. 微电机, 2014, 47(2): 64-72.
BAO Haijing, LIANG Peixin, CHAI Feng. Key technology of high speed permanent magnet synchronous motors for FESS[J]. Micromotors, 2014, 47(2): 64-72.
[15] 邢向上, 姜新建. 飞轮储能系统电机及其控制器概述[J]. 储能科学与技术, 2015, 4(2): 147-152.
XING Xiangshang, JIANG Xinjian. Introduction to motors and controllers of flywheel energy storage systems[J]. Energy Storage Science and Technology, 2015, 4(2): 147-152.
[16] 陆婋泉, 林鹤云, 韩俊林. 永磁同步电机的扰动观测器无位置传感器控制[J]. 中国电机工程学报, 2016, 36(5): 1387-1393.
LU Xiaoquan, LIN Heyun, HAN Junlin. Position sensorless control of permanent magnet synchronous machine[J]. Proceedings of the CSEE, 2016, 36(5): 1387-1393
[17] ZHAO Jing, GU Zhongxin, LI Bin, et al. Research on the torque and back EMF performance of a high speed PMSM used for flywheel energy storage[J]. Energies, 2017, 8(4): 2867-2888.
[18] WANG Gengji, WANG Ping. Rotor loss analysis of PMSM in flywheel energy storage system as uninterruptable power supply[J]. IEEE Transactions on Applied Superconductivity, 2017, 26(7): 1-7.
[19] 薛小川, 王志强. 磁悬浮储能飞轮振动状态研究[J]. 自动化仪表, 2017, 38(7): 89-94.
XUE Xiaochuan, WANG Zhiqiang. Study on the vibration condition monitoring for magnetic levitation energy storage flywheel[J]. Process Automation Instrumentation, 2017, 38(7): 89-94.
[20] 张激扬, 刘虎, 王虹, 等.飞轮扰振特性及振动控制方法[J]. 空间控制技术与应用, 2014, 40(5): 18-25.
ZHANG Jiyang, LIU Hu, WANG Hong, et al. Microvibration characteristics of flywheels and its vibration control approaches[J]. Aerospace Control and Application, 2014, 40(5): 18-25.
[21] LI Lin, TAN Luyang, KONG Lin, et al. Flywheel micro-vibration characters of a high resolution optical satellite[J]. Journal of Vibroengineering, 2017, 19(6): 3981-3993.
[22] 崔淑梅, 匡志, 杜博超. 基于自抗扰控制原理的全电飞机用永磁同步电机转速闭环控制[J]. 电工技术学报, 2017, 32(s1): 107-115.
CUI Shumei, KUANG Zhi, DU Bochao. Speed closed-loop control of permanent magnet synchronous motor for all-electric aircraft applications based on active disturbance rejection controller[J]. Transactions of China Electrotechnical Society, 2017, 32(s1): 107-115.
[23] 梁明亮, 陈志红, 孙晶晶. 基于ESO的永磁同步电机位置伺服系统滑模变结构反步控制[J]. 科技通报, 2017, 33(5): 72-76.
LIANG Mingliang, CHEN Zhihong, SUN Jingjing. Sliding mode variable structure backstepping control of permanent magnet synchronous motor position servo system based on eso[J]. Bulletin of Science and Technology, 2017, 33(5): 72-76.
[24] WU Yunjie, GUO Fei. Adaptive disturbance compensation finite control set optimal control for PMSM systems based on sliding mode extended state observer[J]. Mechanical Systems and Signal Processing, 2018, 98: 402-414.
[25] 陈荣. 永磁同步电机控制系统[M]. 北京: 中国水利水电出版社, 2009.
CHEN Rong. Permanent magnet synchronous motor control system[M]. Beijing: China Waterpower Press, 2009.
[26] 于波, 陈云相, 郭秀忠. 惯性技术[M]. 北京: 北京航空航天大学出版社, 1994.
YU Bo, CHEN Yunxiang, Guo Xiuzhong. Inertial technology[M]. Beijing: Beihang University, 1994.
[27] 闫永蚕, 汤洲, 高楠, 等. 基于空气动力学的高速列车造型设计研究进展[J]. 机械设计, 2017, 34(6): 105-112.
YAN Yongcan, TANG Zhou, GAO Nan, et al. Research progress on modeling design of high-speed train based on aerodynamics[J]. Journal of Machine Design, 2017, 34(6): 105-112.
[28] 解瑞雪. 车辆尾部多参数空气动力学分析及优化设计[J]. 上海电机学院学报, 2017, 20(3): 125-131.
XIE Ruixue. Multi-parameter aerodynamic analysis andoptimized[J]. Journal of Shanghai Dianji University, 2017, 20(3): 125-131.
Research on disturbance analysis and detection method for the magnetically suspended flywheel-based PMSM system
LI Shusheng1,3, FU Yongling1, LIU Ping2, WANG Zhiqiang1
(1Beijing University of Aeronautics and Astronautics, Beijing 100191, China;2Power China Road Bridge Group Engineering Design Research Institute Limited Company, Beijing 100048, China;3Beijing Honghui International Energy Technology Development Co., Ltd, Beijing 101300, China)
This paper presents the modeling and characteristic analysis of the unknown disturbances for the flywheel energy storage system, considering the property of the three-phase permanent magnet synchronous motor. Firstly, the rotor dynamics mode under the circumstance of the dynamical base is established, and based on this, the model and property of the multi-source disturbances are given in detail. A status detection system is designed and accomplished to gain the essential input parameters for the disturbance. Then, the real-time speed, magnetically bias force and base vibration information can be obtained for the flywheel energy storage system. Finally, the experimental equipment of the magnetically suspended flywheel energy storage system is proposed with the flywheel parameters, which can be used appropriately to demonstrate the disturbance property and its depressing strategy.
magnetically suspended flywheel energy storage system; permanent magnet synchronous motor; disturbance status detection system
10.12028/j.issn.2095-4239.2017.0157
TM 341
A
2095-4239(2018)05-794-09
2017-11-04;
2017-12-21。
国家重点研发计划项目(2018YFB0905500),第61批中国博士后科学基金(2017M610735)。
李树胜(1986—),男,博士后,研究方向为大功率磁悬浮储能飞轮充放电控制,E-mail:lss123048@163.com。
猜你喜欢
防爆电机(2022年3期)2022-06-17
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
防爆电机(2020年6期)2020-12-14
模具制造(2019年7期)2019-09-25
表面工程与再制造(2019年3期)2019-09-18
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
中国自行车(2017年11期)2017-04-04
光学精密工程(2016年3期)2016-11-07
