
水稻精密播种机供种系统的仿真分析*
2018-09-20 01:12:16刘永武杨发展李建东王玉玲姜芙林魏海明
机械制造 2018年9期
□ 刘永武□ 杨发展□ 李建东□ 王玉玲□ 姜芙林□ 魏海明□ 罗 佳
1.青岛理工大学机械与汽车工程学院 山东青岛 266520
2.中机美诺科技股份有限公司 北京 100083
1 研究背景
我国是一个农业大国,农业问题关系到国民经济发展、社会稳定和国家富强,成为不可忽视的国家大事。在我国南方,粮食主要以水稻为主,因此提高水稻机械化栽种显得尤其重要。目前,我国的水稻播种机械主要来自国外,国内在水稻播种育种这一领域起步较晚,但有后来赶上的优势且前景良好。对水稻精密播种机进行研制,能够加快水稻精密播种,促进增产增收。
笔者应用Pro/E软件进行实体模型创建,装配精密播种机供种系统的虚拟样机,并利用软件中的运动机构仿真模块对关键部件进行干涉检查,检查样机的装配合理性,同时选取关键部件进行位移和速度变化分析。
2 整机设计
整机动力由步进电机提供,通过联轴器将步进电机与链轮轴连接,步进电机的旋转带动链轮转动,主动轮旋转带动链条运动,随之带动装配在链条上的推块运动,推块推动种盒向前运动,进而将种盒内的种子推到落种孔,由落种孔进入落种管到达排种器,最后由排种器排出种子。每个种盒可以装不同品种的水稻试验种子,从而实现种子的精密播种。笔者所设计的精密播种机主要由电机、机架、种盒导板、落种板、种盒、种盒盖板、推块、链条传动系统、撑杆及底座等组成。
基于Pro/E虚拟样机制造技术,设计精密播种机零部件,并按装配要求装配,最后进行动态分析[1],设计流程如图1所示。
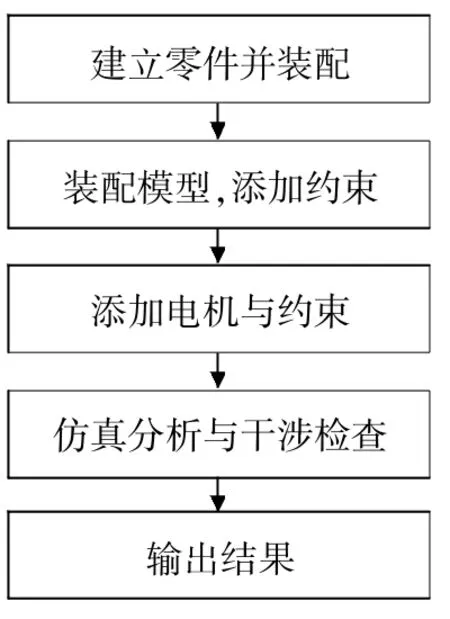
▲图1 设计流程
3 三维建模
应用Pro/E软件对水稻精密播种机供种系统进行三维建模,如图2所示。供种系统一次可以放十个种盒,实现六行播种。种盒三维模型如图3所示。
虚拟样机技术融合了先进的建模仿真技术、先进设计技术等,将这些技术应用于复杂产品的全生命周期和全系统设计,能进行综合管理。与传统产品设计相比,虚拟样机技术支持对产品的全方位测试、分析与评估,强调不同领域的虚拟化协同设计[2]。

▲图2 供种系统三维模型

▲图3 种盒三维模型
笔者设计将种盒装满种子,倒扣在种盒盖板上,放入指定位置。通过电机提供动力,电机经联轴器带动链轮轴转动,通过链条传动带动推块运动,推块推动种盒向前移动。当到达落种孔时,种盒内的种子因重力下落,经落种管到达排种器。一个种盒排空后,后续跟进,直至种盒内的种子都进入排种器。虚拟样机的机构模型由驱动装置、传动装置、推动机构组成。其中,推动机构对供种精度起重要影响,因此重点分析这一机构。推动机构由推块装配在链条上,通过链条的运动带动推块在机架导轨上移动,实际上相当于滑块导轨。推动机构装配如图4所示。
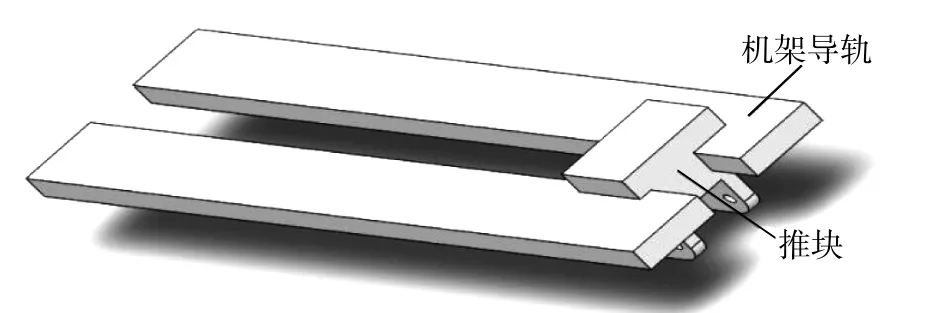
▲图4 推动机构装配
4 运动仿真
4.1 添加步进电机
由于笔者设计的供种系统与水稻精密播种机其它部件是独立的,因此需要安装独立的步进电机。步进电机将电信号转换为角位移信号,其转速与停止位置取决于脉冲信号的频率和脉冲数量,而不受负载变化的影响[4-6]。当步进电机的驱动器接收到脉冲信号时,驱动器就驱动步进电机沿设定的方向转动固定的角度,由电机的旋转带动链条运动。通过控制脉冲数量来控制角位移量,从而实现准确定位的目的。同时,也可以通过控制脉冲频率来控制旋转的速度和加速度,从而实现供种速度的调整。
由于主要模拟推块运动,因此推块和机架导轨的装配关系要准确,然后进入机构模块,添加步进电机,选择运动方式为几何运动,接着选择运动零件,再选择方向,最后选择运动路径为直线运动,并设定位置或速度[7]。完成机构分析设置后,再设定运动时间,就可以模拟推块运动。
4.2 机构运动干涉检查
运动学仿真可确定一点的位移、速度及加速度变化范围。整机虚拟样机装配完成后,由装配环境转换为机构环境,添加和定义步进电动机。选择分析类型为运动学分析,设定开始时间为0,结束时间为10 s,运行并保存仿真图表。点击回放,在回放界面中将碰撞检测类型设置为部分碰撞检测,进行机构的干涉检查[8-9]。
4.3 位移分析
装配体完成运动干涉检查后,将进行位移变化的仿真分析。记录运动位移随时间变化曲线并输出,有助于理解和分析机构运动结果,并可提供改进机械设计的信息。
创建测量measure1,设定测量类型为位置,选取推块末端为测量点,选取机架导轨上表面的装配坐标系为参考坐标系,测量位移。测量结果如图5所示。
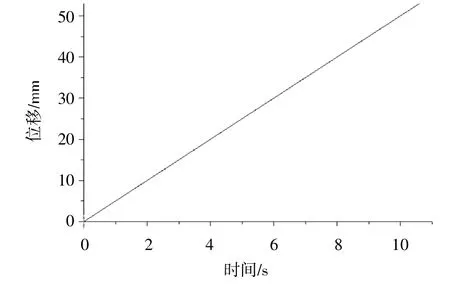
▲图5 推块水平位移变化曲线
由图5可以看出,推块为连续直线运动,推动种盒不断供种,可以将所有种盒的种子都送到落种孔,保证种子的下落,实现连续供种。
4.4 速度分析
推块的速度对种子的下落有很大影响,若速度过快,种盒里的种子还没有落下就被推走,若速度过慢,连续等待的时间过长,影响播种进程,所以选择一个合适的速度非常重要。创建测量measure2,默认测量类型为时间步长[10]。测量结果如图6所示。
由图6可以看出,种盒始终以恒定的速度向前运动,运动过程没有速度变化,不会造成冲击振动影响投种精度,满足实际播种要求。
5 结束语
虚拟样机是非常有效的设计工具[11],已成为设计新产品的必备工具[12]。设计水稻精密播种机供种系统的虚拟样机,对虚拟样机进行仿真,对关键部件的速度变化规律进行分析,得到速度变化曲线。同时获得播种过程中推块位移变化曲线,为整机的优化设计提供了理论依据。
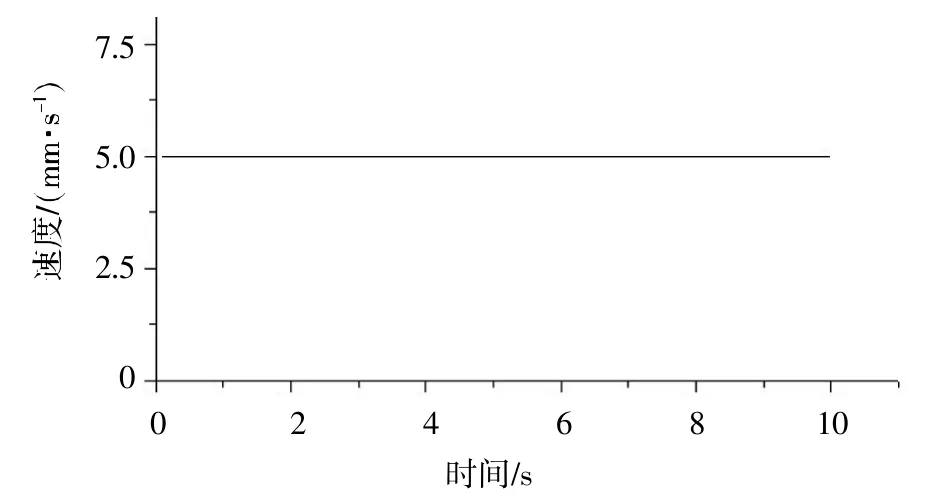
▲图6 推块速度变化曲线
猜你喜欢
农业机械学报(2022年6期)2022-08-05 01:31:06
农业工程学报(2022年7期)2022-07-09 06:02:32
中国特种设备安全(2022年4期)2022-07-08 02:42:40
沈阳农业大学学报(2021年6期)2021-02-13 07:20:36
装备制造技术(2020年4期)2020-12-25 05:26:04
今日农业(2020年22期)2020-12-14 16:45:58
农业机械学报(2018年5期)2018-05-31 03:15:48
时代农机(2016年6期)2016-12-01 04:07:20
雷锋(2016年4期)2016-05-30 02:09:48
环境科技(2015年4期)2015-11-08 11:10:40
