一种智能立体旋转快递存取装置设计研究
2018-09-17 09:26阮学云胡自然
机械设计与制造 2018年9期
阮学云,丁 恒,胡自然,陈 华
(安徽理工大学 机械工程学院,安徽 淮南 232001)
1 引言
近年来,随着互联网行业的发展,快递行业也得到蓬勃发展。然而,在快递物流派送过程中,快递终端派送作为一道必不可少的工序,多年来一直采取人工送货上门或在一定的时间段等待顾客收取快递,费时费力,大大降低了派送效率,为客户带来极大不便,因此市场对安全高效的智能快递存取装置的需求十分迫切[1]。
目前为止,市场上已存在类似的机械产品,即固定式快递柜[2]。现在市场上已有的自动存取装置虽然已经投入市场使用,但是效益和评价等方面存在很多不足。从用户体验方面来说,类似固定式存取柜这种产品的外形类似于超市的自动存取货柜,存取件必须找到对应的柜门,不够便捷。针对快件量大的派送区域,这种产品存在存件数量少,效率低的难题
因此设计一种新型智能快递存储装置,解决目前快件存储利用率低,占地面积大,智能化程度不高的问题有着重要意义。
2 整体结构设计
针对以上存在不足,设计了一种智能立体旋转快递存取装置。该结构整体示意图,如图1所示。包括机械结构和PLC控制系统两部分,其中机械结构包括旋转体、储物格、螺旋滑槽等;PLC控制系统包括PLC、工控机、伺服电机以及减速器、电动推杆、霍尔传感器等[3]。由于采用PLC控制系统与机械机构协调工作[4],实现了智能分发快递,可以减少劳动强度,保证投递员和商品的安全。
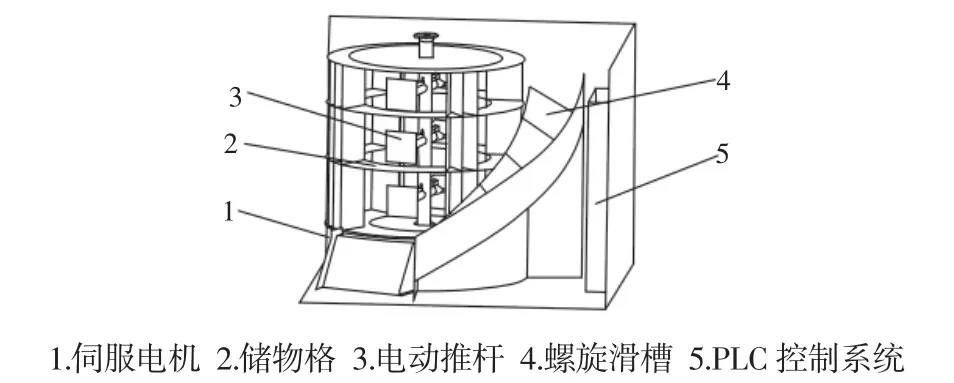
图1 智能立体旋转快递装置的整体结构图Fig.1 Overall Structure Diagram of Intelligent Three-Dimensional Rotating Express Device
3 机械系统机构及工作原理
智能立体旋转快递存取装置设计右视图与主视图,如图2、图3所示。该机械装置内部包含有储物格,机座,支撑杆,减速器,大小齿轮,角接触球轴承,支撑圆盘,储物圆盘,顶板,顶部支撑,顶部连接轴,底盘,推杆支架,螺旋滑槽等[5-6]。
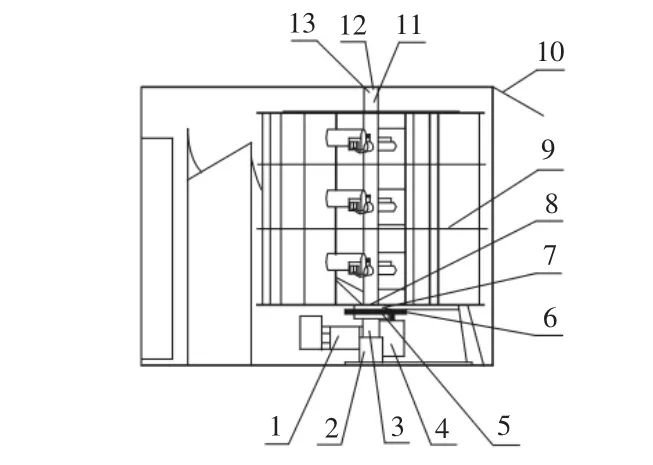
图2 智能立体旋转快递装置右视图Fig.2 Right View Diagram of Intelligent Three-Dimensional Rotating Express Device

图3 智能立体旋转快递装置主视图Fig.3 Main View Diagram of Intelligent Three-Dimensional Rotating Express Device
机械结构包括旋转体、储物格、螺旋滑槽等。机械装置主要工作原理:PLC控制系统向伺服电机驱动器发出相应信号,驱动器通过控制脉冲以控制电机的启动和停止,电机通过减速器传动实现降速和增大扭矩,在减速器作用下,其联接小齿轮带动啮合在旋转盘的大齿轮传动,大齿轮带动旋转体转动,旋转体上的储物格随之转动。其中旋转体装置分为多层圆盘,每层平均分为多个储物格,上层储物格多,为小件储物格,下层为大件储物格,以适应不同尺寸的快递和提高空间的利用率,达到小地方大存量的效果,中间是一个旋转轴,三层圆盘可以绕轴旋转,每层的轴上都有一个电动推杆,可以将储物格内的快递推入螺旋滑槽上,从而实现快递的快速取件。该装置还包括中央控制装置、可旋转圆形储物装置、输入输出装置、传送装置、运动执行等装置。其中中央控制装置具有扫描条形码、发送验证短信、控制运动执行装置、可旋转圆形储物装置、输入输出装置的功能。输入输出装置由小键盘、液晶显示频、摄像头等组成,快递员放入快递时扫描快递包装和各个储物格的条形码,中央控制装置记录每个快递存放的位置。传送装置是多层螺旋向下的滑轨,上层快递滑过本层轨道后进入下层轨道,最终滑向出口。运动执行装置主要由电动机、减速器、齿轮等组成。
4 PLC控制系统设计
4.1 智能立体旋转快递存取装置控制原理
本机构的PLC控制系统部分、包括PLC、工控机、伺服电机以及减速器、电动推杆、霍尔传感器等主要元件,由PLC控制系统向伺服电机上的减速器发出指令控制电机的速度,通过霍尔传感器的检测,以实现电机的制动,在电动推杆的配合下从而实现快件的存取[7]。当快递员根据操作窗口(PLC控制)提示的存件大小输入具体尺寸规格(大中小)时,系统自动分配对应型号的空储物格到达相应的存件口,快递员可以放入所要派送的快件,这时需要快递员扫描快件上的条形码,然后输入收件人的手机号码,这时系统会生成一个和快递所在储物格对应位置的随机验证码,并发送给用户。用户根据验证码,输入操作平台界面后,中央控制系统会据此信号发送给伺服电机实现储物格旋转,当霍尔传感器检测到对应快件的储物格物理地址时,储物格停止转动,智能推杆机构自动弹出所需的快件,实现取件动作。智能立体旋转快递存取装置控制原理图,如图4所示。
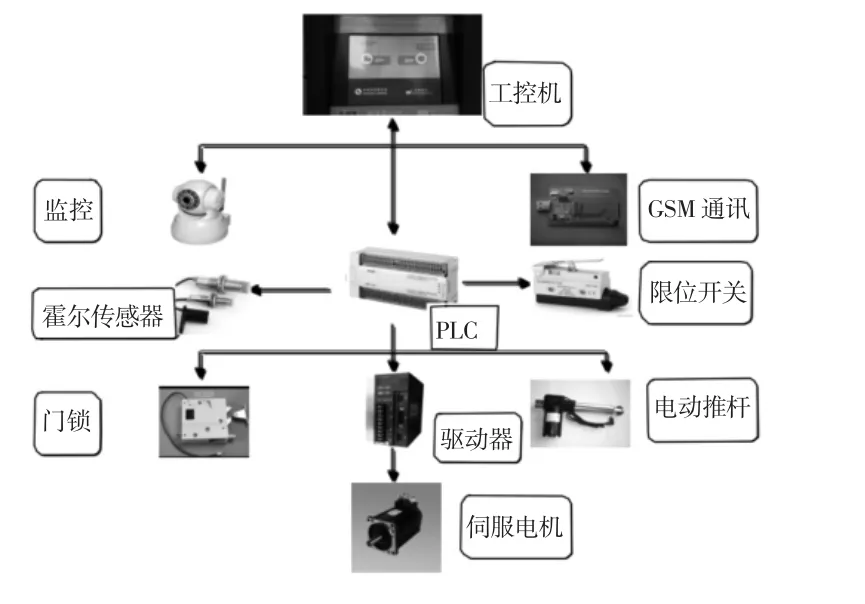
图4 智能立体旋转快递存取装置控制原理图Fig.4 The Diagram of Control Principle of Intelligent Three-Dimensional Rotating Express Access Device
4.2 PLC控制部分程序工作原理
4.2.1 PLC工作原理
当可编程逻辑控制器投入运行后,其工作过程一般分为三个阶段,即输入采样、用户程序执行和输出刷新三个阶段。完成上述三个阶段称作一个扫描周期。在整个运行期间,可编程逻辑控制器的CPU以一定的扫描速度重复执行上述三个阶段。
(1)输入采样阶段
在输入采样阶段,可编程逻辑控制器以扫描方式依次地读入所有输入状态和数据,并将它们存入I/O映象区中的相应的单元内[8]。输入采样结束后,转入用户程序执行和输出刷新阶段。在这两个阶段中,即使输入状态和数据发生变化,I/O映象区中的相应单元的状态和数据也不会改变。因此,如果输入是脉冲信号,则该脉冲信号的宽度必须大于一个扫描周期,才能保证在任何情况下,该输入均能被读入。可编程逻辑控制器。
(2)用户程序执行阶段
在程序执行的过程中如果使用立即I/O指令则可以直接存取I/O点。即使用I/O指令的话,输入过程影像寄存器的值不会被更新,程序直接从I/O模块取值,输出过程影像寄存器会被立即更新,这跟立即输入有些区别。
(3)输出刷新阶段
当扫描用户程序结束后,可编程逻辑控制器就进入输出刷新阶段。在此期间,CPU按照I/O映象区内对应的状态和数据刷新所有的输出锁存电路,再经输出电路驱动相应的外设。这时,才是可编程逻辑控制器的真正输出[9]。
4.2.2 存件工作原理
快递员通过工控机组态界面,以管理员身份打开管理器,点击存件指令,选择箱型,输入运单号码以及收件人的手机号码,确认。工控机中设计的组态软件会将相应箱型空格的位置以及存件指令告知PLC[10],系统通过霍尔传感器找到相应列的位置,并会给伺服电机驱动器相应信号,驱动器通过控制脉冲以控制电机的启动和停止。电机通过减速器传动达到按照固定速比降速和增大扭矩的目的。减速器联接小齿轮带动套在旋转盘的大齿轮传动,实现储物格的旋转运动。当相应箱型层的空储物格转至正对箱门的位置时,PLC控制电机停止转动,箱门自动弹开,并通过预先编好的程序,将拟定的带有随机开箱码和运单号码的信息实时发送至客户手机。最后,快递员将快递放入空储物格中,将箱门关上,工控机操作界面回复初始状态。完成存件流程。
4.2.3 取件工作原理
客户取件时,工作原理与取件原理类似,不同点在于,用户通过工控机组态界面,点击存件指令输入取件开箱码,组态会将相应箱格的位置以及取件指令告知PLC,PLC传递高速脉冲信号给伺服电机驱动器,驱动器控制电机的转动,通过霍尔传感器的检测,到达相应列位置时,PLC控制电机停止转动。当储物格的位置到位后,推杆伸出,将物件推至螺旋滚轴滑槽。物件顺滑槽至下方取物箱。推杆有最大行程,当达到最大行程后,将会自动退回。客户将物件取走,完成取件动作。
5 现场试验
在机械结构与PLC控制系统组装完成以后,需要对整个装置功能进行试验验证,调试主要分为以下几个方面:伺服电机的调速,推杆的调试,门锁的调试。所得实验相关参数记录,如表1所示。具体实施措施:将伺服电机与PLC连接前,需事先设置伺服电机的固定转速,电机转动一转所需脉冲数,这里将脉冲数设置为3000,即每3000个脉冲电机转动一转,这时,只需控制脉冲频率即可控制电机转速;推杆及门锁所需的额定电压为24V,所以需要对其接入24V的直流电源。伺服电机接入220V交流电压,在接收到PLC控制系统的命令后,一方面电机运行,配合减速器带动旋转体转动,另一方面,电动推杆实行伸缩运动,将快件推落到螺旋滑槽,实行存取件。

表1 实验记录Tab.1 The Records of Experiment

图5 智能立体旋转装置现场实验图Fig.5 The Field Experiment Diagram of Intelligent Three-Dimensional Rotating Device

图6 工控机现场实验图Fig.6 The Field Experiment Diagram of Industrial Computer
实验发现在电压稳定的情况下伺服电机、电动推杆、自动门锁动作时间基本一致,根据PLC控制系统与机械结构的配合可以实现快件的存取,该PLC控制原理可行。
6 结论
设计一种基于PLC控制系统下的一种智能立体旋转快递存取装置,该装置结构简单、安全高效,本设计创新之处主要体现在以下几个方面:(1)分层圆盘储物格,空间利用率高,占地面积小,螺旋滑槽机构能够平稳安全的将快件输送到取件口。(2)电动推杆通过伸长和收缩将快递推入到螺旋滑槽,工作效率高,实用价值大。(3)采用PLC控制系统,实现智能发送验证码、二维码等验证信息,保证隐私安全。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
科技与创新(2021年15期)2021-11-28
哈哈画报(2021年12期)2021-02-28
模具制造(2019年10期)2020-01-06
小雪花·初中高分作文(2019年8期)2019-10-07
中小企业管理与科技(2019年6期)2019-04-20
中国储运(2019年1期)2019-01-09
发明与创新·中学生(2018年8期)2018-09-08
铁路技术创新(2018年2期)2018-06-11