
基于V2X通信网络的车辆协同定位增强方法∗
2018-09-14 01:53段续庭田大新王云鹏
汽车工程 2018年8期
段续庭,田大新,王云鹏
(北京航空航天大学交通科学与工程学院,车路协同与安全控制北京市重点实验室,北京 100191)
前言
随着信息化步伐的快速迈进,无线通信、移动网络和传感网等领域得到极大发展,并呈现出向智能交通系统(intelligent transportation systems,ITS)渗透和融合的趋势,促使ITS进入高级智能化阶段。车联网技术作为近年来ITS领域最为热门的研究方向,通过车联万物(vehicle-to-anything,V2X)实现车辆之间以及车辆与道路基础设施之间的高效信息交互与数据共享,为“人-车-交通流”构成的复杂物理信息融合系统和“车内-车际-互联网”构成的车辆移动网络提供了资源优化的根本保障,使传统的车载网络传输与控制、交通基础设施以及综合交通效能的改善方式发生前所未有的变革。位置信息作为车辆状态的关键表征是车联网技术最为频繁的数据交互类型,其准确可靠程度是实现交通安全通行、保障车路协同系统和自动驾驶技术顺利实施的重中之重。然而,因基于卫星导航系统的定位技术原理约束,容易受到频繁变化的外部环境影响,在城市“高楼峡谷”或隧道等弱卫星信号覆盖区域,将面临定位系统失效、精度不足和数据不连续等问题,难以满足交通安全应用对车辆位置信息的高实时、高可靠、高精准度需求。
1 V2X通信
车联网系统中已经存在的或未来将采用的车联万物通信场景如图1所示。通信方式主要分为车网通信(vehicle-to-network,V2N)、车路通信(vehicleto-infrastructure,V2I)、车车通信(vehicle-to-vehicle,V2V)、人车通信(vehicle-to-pedestrian,V2P)[1-2]。目前,主要通信技术手段有DSRC和LTE-V,其中DSRC技术中,V2V组网方式定义为Ad-hoc-点对点模式,V2I组网方式定义为Station-点对接入点模式;LTE-V技术中,V2V和V2P组网方式定义为PC5-终端直连(device-to-device,D2D)模式,在V2I和V2N组网方式中,由于时分长期演进(time division long term evolution,TD-LTE)和频分双工长期演进(frequency division dual long term evolution,FDD-LTE)技术中路侧单元在网络中的身份定位存在区别,组网方式仍未形成定论,可能定义为PC5-D2D模式,也可能是UU-设备对基站模式。5G作为下一代移动通信技术,现阶段仍处于技术探索和标准化制定阶段,在其构想中主要设计了3种面向未来需求的应用场景,包括:增强移动宽带(ehanced mobile broadband,eMBB),大规模物联网(massive machine type communications,mMTC),以及超高可靠超低延迟通信(ultra-reliable and low latency communications,URLLC)。其中,URLLC场景技术指标即是为车联网领域量身打造,具体的组网模式仍处于标准规划阶段。在 V2X系统中,DSRC,LTE-V和5G URLLC与分布式天线系统(distributed antenna system,DAS)、多输入多输出系统(multiple-input multiple-output,MIMO)以及大规模多输入多输出系统(massive multiple-input multiple-output,Massive MIMO)的结合,不仅可大幅度提高网络容量,还可为实现基于V2X信号的无线定位方法提供支撑。此外,图1中,mmWAVE表示毫米波通信,mmWAVE D2D表示未来5G定义的D2D组网模式,mmWAVE D2BS表示未来5G定义的设备对基站的组网模式,RSU表示DSRC路侧通信单元,eNB表示LTE-V基站,gNB表示5G基站,LOS和NLOS分别表示视距通信和非视距通信。
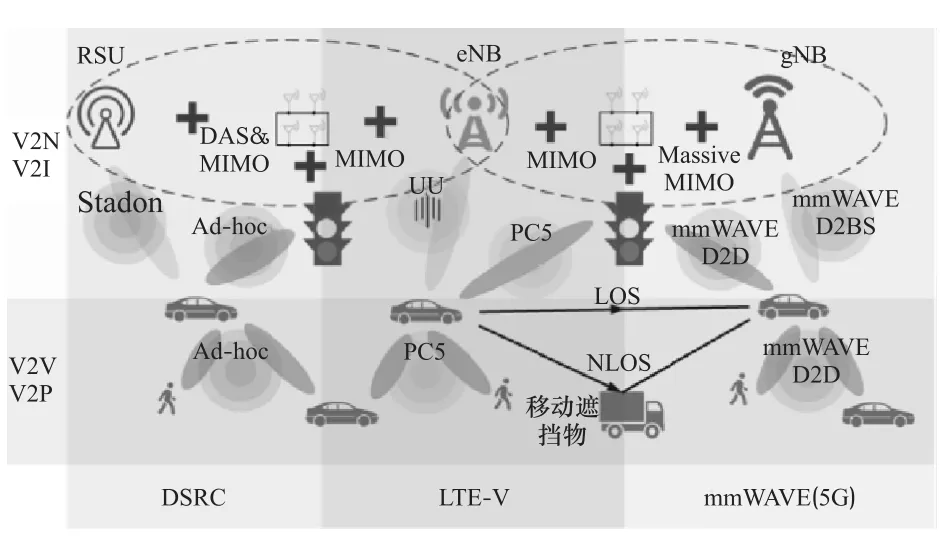
图1 异构V2X通信网络
依据3GPP TR 22.885 V14.0.0标准,V2X通信对不同应用场景下终端的通信性能指标的要求规范如表1所示。典型交通场景涉及城郊、高速公路、无限速高速公路、多种市区环境、校园和购物中心等,针对上述场景,具体的通信性能指标包含通信半径覆盖范围、可支持终端的最高移动速度(独立终端的绝对速度和两个终端间的相对移动速度)、通信延迟、百毫秒传输可靠比和累积传输可靠比。
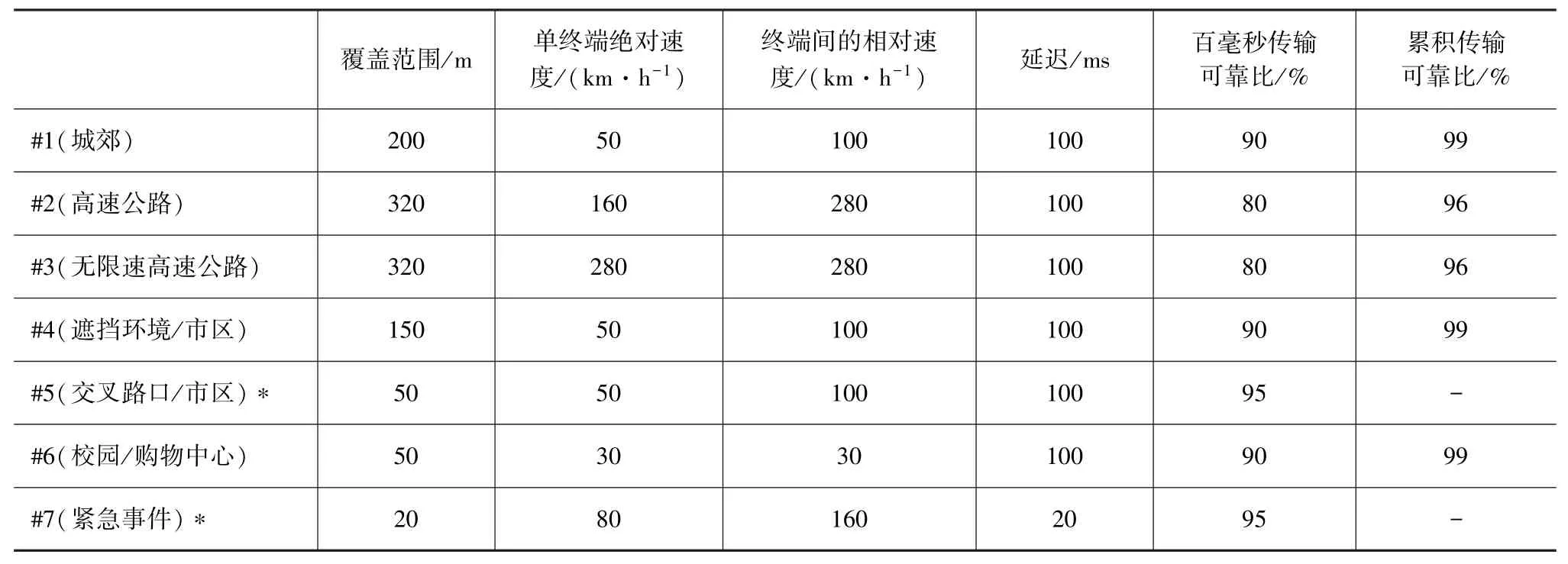
表1 V2X服务指标要求
表1中带有∗标识的#5和#7场景表示,需要在短时间、小范围内保证数据包的高度可靠,所以数据包的累积传输可靠比在此场景中不能作为衡量指标,即失效。
2 网络定位
2.1 DSRC通信网络定位终端
根据DSRC系统应用层需求,设计实现应用层交互协议,规范V2X不同应用间的信息交互接口,为“车联万物”提供协议规范基础。目前,已实现车辆之间、车辆与行人、车辆与信号灯、车辆与电子指示牌、车辆与视频或微波检测系统和车辆与数据中心等系统间的信息交互规范,支持车辆定位算法开发[3],终端原型如图2所示。

图2 DSRC通信网络定位终端
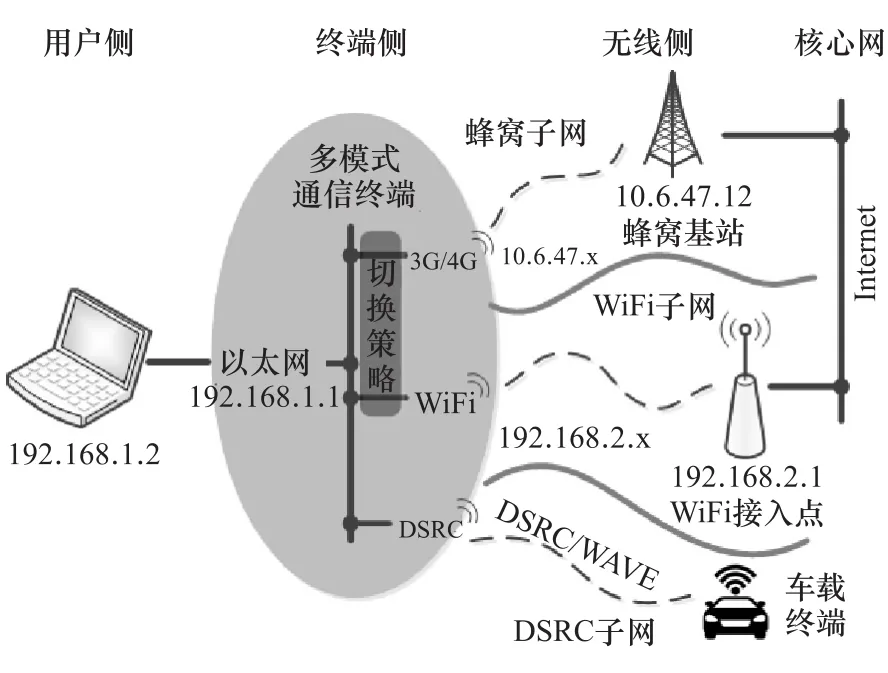
图3 多模式通信系统架构
2.2 多模式通信网络定位终端
多模式通信系统架构如图3所示,与DSRC通信网络定位终端相似,多模式通信网络定位终端的软硬件集成开发也在OpenWrt嵌入式系统基础上实现,具体硬件模块构成如图4所示,包含DSRC,Wi-Fi,3G(可扩展4G)等主要模块。其中,该终端可根据Wi-Fi和3G网络的当前状态,如信号强度和网络质量等指标的变化,自适应切换选择指标更优的通信网络。
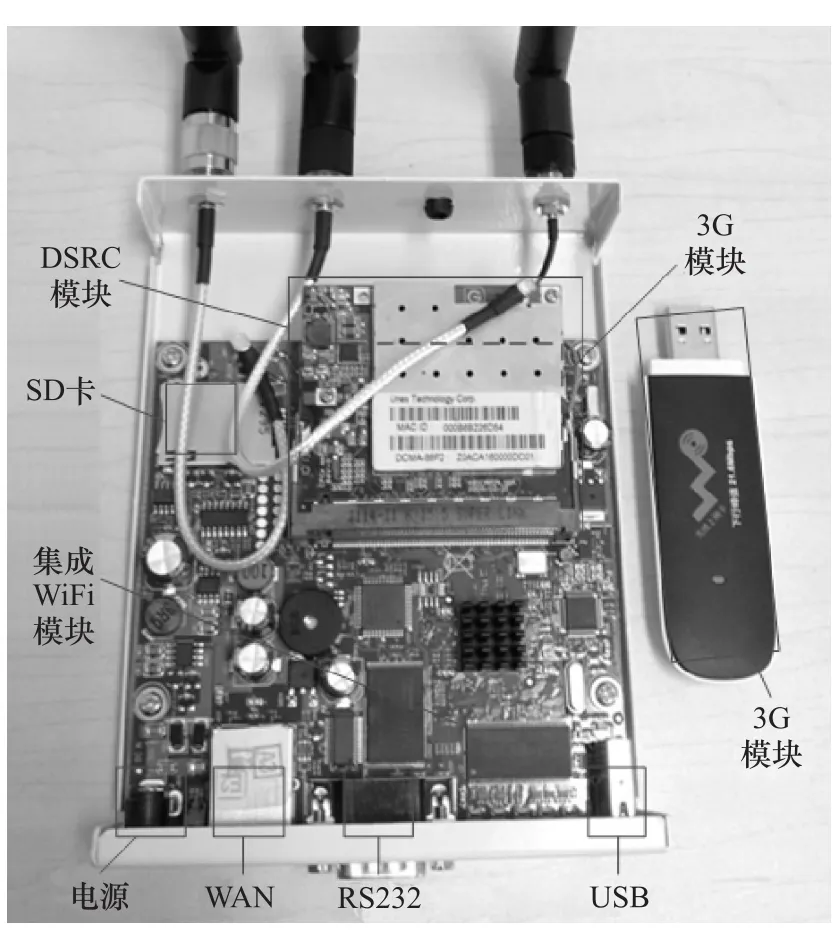
图4 多模式通信网络定位终端
研发多模式通信网络定位终端为开展基于多种V2X通信链路的车辆定位方法研究奠定了系统基础。此外,该终端也可为VANETs路由协议、异构网络选择和网络切换算法的研究与应用开发提供通用接口和底层链路保障。
3 覆盖与数据并发测试
3.1 覆盖测试
最大覆盖范围会随外界环境改变发生剧烈变化,在雾霾和雨雪天气,或TX端和RX端间存在移动遮挡物时,DSRC信号覆盖范围与较理想通信环境下的存在巨大差异。通常,描述无遮挡通信链路为视距通信环境LOS,有遮挡通信链路为非视距通信环境NLOS。在北京航空航天大学校园开展实验测试,测试环境如图5所示。研发的通信网络定位终端在 LOS环境的最大覆盖范围约为380m,在NLOS环境的最大覆盖范围约为120m[4]。
3.2 数据并发测试
由于硬件资源限制,通常须通过仿真方法实现大规模车辆通信效能的测试验证。本研究中,在室内环境模拟大规模车辆并发接入和消息广播应用场景,测试验证自主研发的DSRC通信网络定位终端的可靠性。测试系统由6套DSRC通信网络定位终端和测试软件组成,测试环境如图6所示。测试内容包含:在多终端并发广播和长时间工作情况下,DSRC通信网络定位终端的延迟和丢包等指标能否满足V2X应用需求。测试结果表明:该终端性能可靠稳定,能满足V2X应用技术指标的要求,这为开展基于DSRC的车辆定位方法研究奠定了系统基础。此外,该终端也可为车辆自组织网络(vehicular Ad-hoc networks,VANETs)路由协议研究和应用开发提供通用接口和底层链路保障。
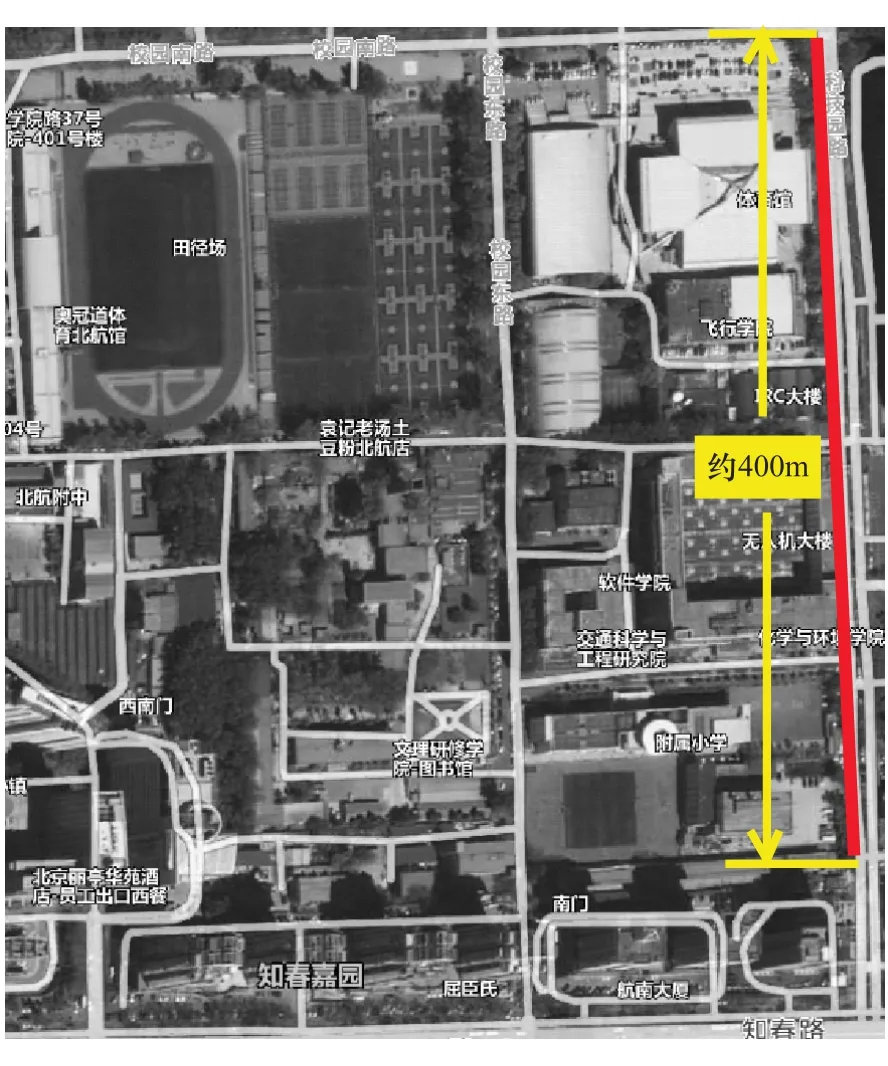
图5 测试环境

图6 大规模车辆并发接入与消息广播应用场景
4 协同定位增强
4.1 基本原理
在传统的车辆定位系统中,GNSS模块负责实现车辆定位,惯性传感器与运动学模型匹配,负责实现车辆运动过程的追踪。然而,传统车辆定位系统由于其本身技术的相对局限性,如GNSS系统在弱卫星信号覆盖区域会精度失准或定位失效,惯性传感器长时间工作会发生速度漂移现象(其误差随着时间的推移累积叠加),难以满足车联网技术不断发展对车辆位置信息的更高质量需求。因此,为进一步提高车辆定位能力,不仅需要传统系统中的GNSS和惯性传感器模块,还需要为车辆增加更多的感知手段,如摄像头、激光雷达、射频和地图等。与此同时,还可在空间协作层面,通过车联网中的车车、车路通信技术获取邻居车辆的共享位置信息,以期增强车辆定位能力;在时间协作层面,可利用仪表盘提供的车速和加速度等数据、罗盘提供的航向角数据和经验运动学模型知识等,通过数据融合优化滤波方法,进一步增强车辆定位能力。综上所述,未来车辆定位精度增强方法,将会在时间、空间两个维度同时展开,尽可能地挖掘定位能力的潜在提升空间,达到系统的最优定位性能。
通过仿真方法测试验证协同定位增强算法的潜在收益,为大规模部署提供理论指导和依据。
4.2 方法验证
初始化道路仿真场景,建立x-y直角坐标系,道路场景为双向四车道,车道道宽3.5m,车道长度1 000m。假设车流密度为20辆/km,车速在[50,60]km/h区间服从均匀分布。所有相邻车辆的初始位置服从均匀分布随机出现在道路上,目标车辆的初始位置在(300,5)点,以60km/h的初始速度沿x轴正方向行驶。在行驶过程中,目标车辆的速度会受到控制向量和运动学模型噪声项的影响,会出现较小幅度的波动[5]。
车辆系统方程中运动学模型部分,令运动方程组中转移矩阵F和G分别为
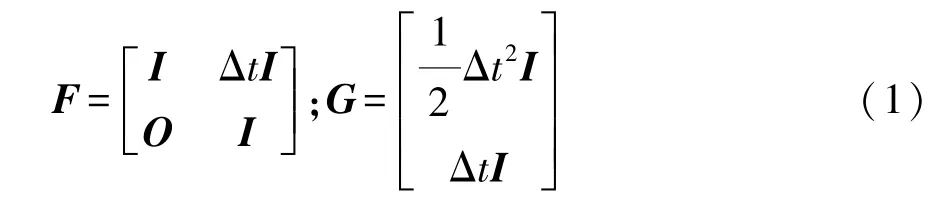
式中:I为二维单位矩阵;O为二维零矩阵;Δt为系统采样间隔。控制向量u1=[0 0.01]T,是加速度值的扰动项,运动学模型噪声项= [σax,k-1,σay,k-1]T~N(0,Q),它的协方差矩阵 Q=diag[σ2ax,]。具体的,仿真中设置σax,k-1=和分别为目标车辆在x和y轴方向的加速度标准差。观测模型噪声项Yk(re)~N(0 R(re)),其协方差矩阵R(re)为1阶马尔科夫链,表征观测噪声在两种不同环境下的迁移情况,其中:
情况一,R(r1)=diag[(r1),…,(r1)],表征目标车辆与相邻车辆间的V2X链路为视距情况(line-of-sight,LOS);
情况二,R(r2)=diag[(r1),…,(r1)],表征目标车辆与相邻车辆间的V2X链路为非视距情况(non-line-of-sight,NLOS)。
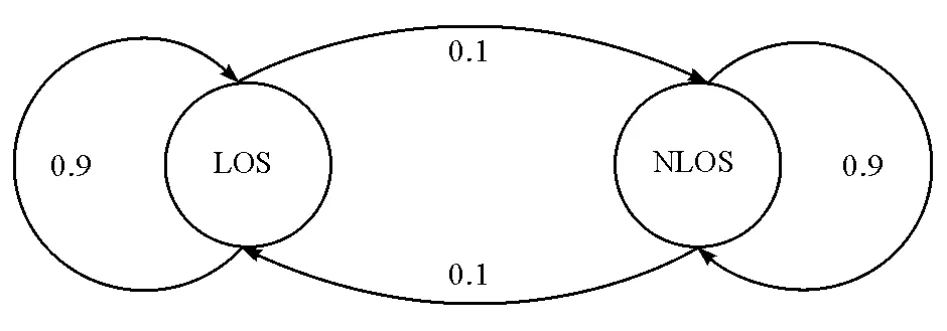
图7 LOS和NLOS状态间概率转移过程
在行驶过程中,目标车辆观测模型的噪声项在第0~30步保持LOS通信链路,在31~80步迁移到NLOS通信链路,在第81~100步再次迁移到LOS通信链路。车载GNSS可提供的x和y方向的位置、速度的标准差分别为σpx=10m,σpy=10m,σvx=
仿真实验结果如图8所示,CV-IMM-CKF算法在短暂迭代后即可超越单一的卫星定位方法。图中纵坐标RMSE的定义见式(2),表示车辆定位的准确程度,其中Nm=500为独立蒙特卡洛实验重复次数。
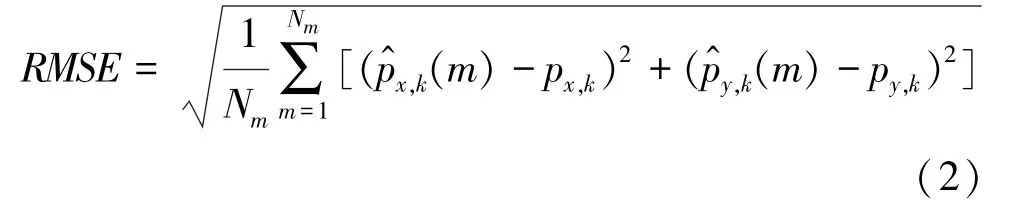
这里,目标车辆的真实轨迹坐标为(px,k,py,k),应用CV-IMM-KF算法后的估计轨迹坐标为(p^x,k,p^y,k),其中(p^x,k(m),p^y,k(m)) 表示目标车辆在第 M次蒙特卡洛实验中,第k步获得的估计轨迹坐标。同时,定义参数μ表征车辆定位性能增强的相对程度:

这里,RMSEA和RMSEB分别为应用CV-IMMCKF和单一GPS获得位置估值的RMSE,从整个路段仿真过程看,CV-IMM-CKF算法可大幅度提升车辆位置信息估值准确度近40%。
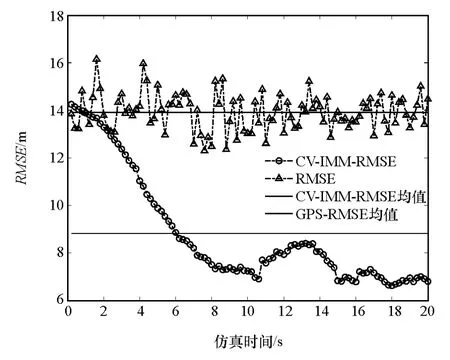
图8 增强性能对比
5 结论
设计了基于V2X的多普勒频移的定位精度增强方法,构建了该协同定位精度增强方法的数学模型,具体包括:建立车辆运动学模型和状态观测模型,应用交互多模型系统描述并追踪多普勒频移观测量在观测模型处于视距/非视距通信的变化过程,通过1阶泰勒公式将非线性观测问题转化为线性问题,并应用IMM-CKF实现数据融合。仿真结果显示,与传统 GPS定位相比,该方法可提升准确度40%。
未来研究中将综合考虑DSRC,LTE-V和5G URLLC等多种V2X通信技术,以期充分利用车联网环境下的泛在无线信号和无线网络资源,深度挖掘其在未来车辆位置高精准估计和交通状态感知中的应用潜力。
猜你喜欢
小猕猴智力画刊(2022年9期)2022-11-04
火力与指挥控制(2022年8期)2022-09-16
网络安全与数据管理(2022年6期)2022-07-13
北方交通(2022年6期)2022-06-18
北京航空航天大学学报(2021年9期)2021-11-02
移动通信(2021年5期)2021-10-25
现代装饰(2020年8期)2020-08-24
中国计算机报(2020年9期)2020-03-25
科技视界(2018年8期)2018-06-08
居业(2017年5期)2017-07-24
