
区域自治型单三相多微电网实时模型预测控制
2018-09-13 12:37刘泽健许志荣
电力自动化设备 2018年9期
刘泽健,杨 苹,2,许志荣,余 涛
1. 华南理工大学 电力学院 广东省绿色能源技术重点实验室,广东 广州 511458;2. 华南理工大学 风电控制与并网技术国家地方工程实验室,广东 广州 511458)
0 引言
随着可再生能源利用技术的发展,微电网作为促进可再生能源就地消纳的有效途径,受到国内外研究机构和学者的广泛关注和深入研究[1-5]。微电网工程的规模化应用,使得地理上邻近的微电网群产生电气联结,形成多微电网系统[5]。多微电网系统的运行方式灵活,能够实现多个微电网之间的协调互济,促进资源优化配置,从而平抑可再生能源出力和负荷的波动,进一步提高用户供电可靠性[6]。因此,其在边远地区、海岛群和城市商业住宅型低压配电网侧都有着广泛的应用前景。
国内关于多微电网的研究和应用仍处于起步阶段。以2006年欧盟“More Microgrids”计划为开端[7],国内外学者针对多微电网展开了系列研究,包括规划设计、稳定控制、优化调度、装置研发和工程应用等各个方面[8-12]。
在脱离配电网的情况下,如何实时平抑可再生能源出力和负荷功率的瞬时波动性,是实现多微电网系统实时功率平衡、保证系统稳定运行的关键。针对该问题,国内外学者进行了相关研究[13-16]:文献[15]基于孤岛电网信息物理系统架构,提出一种有功功率的实时调度模型,并以一致性算法理论为核心提出一种完全分布式算法;文献[16]针对独立运行模式下的微电网能量管理问题,将作为压频控制单元的储能装置的能量状态分为4个区间,确定基点运行功率,根据实时状态提出不同调度策略,并引入负荷竞价策略,实现独立运行微电网的可靠、经济运行。但是上述离网型控制策略仅针对单个微电网或者同种相序微电网群进行协调控制,并未考虑单相及三相微电网互联组合之后,由于其系统三相不平衡等约束而进行实时协调优化控制。
针对脱离配电网情况下所形成的区域自治型单三相多微电网,本文提出一种基于模型预测控制MPC(Model Predictive Control)的实时控制策略。所提策略基于多微电网集散式分层控制架构,考虑三相不平衡度,以实时联络线功率与给定参考值的偏差最小为控制目标,构建多输入、多扰动、多变量的动态预测模型,再将其转化为混合整数非线性规划问题进行求解,同时引入反馈校正环节进行预测误差修正,构成滚动式的有限时域闭环优化控制系统,可实现区域自治型单三相多微电网实时平抑源/荷出力波动、实时调节源/荷/储功率以及实时跟踪联络线功率以满足三相不平衡度约束。
1 单三相多微电网
单三相多微电网是在一定区域内将不同相序的微电网进行电气联结,形成单相发供电模式与三相发供电模式相结合的混联系统,进而通过系统运行方式的灵活切换和“源-荷-储”资源的协调互济,提高用户侧的供电可靠性。光储型单三相混合供电模式的多微电网典型拓扑如图1所示。图中,三相微电网包含三相光伏、三相储能和三相负荷;单相微电网是单相结构,包含单相光伏、单相储能和单相负荷;单相子微电网通过并离网开关接入三相微电网的各相母线。
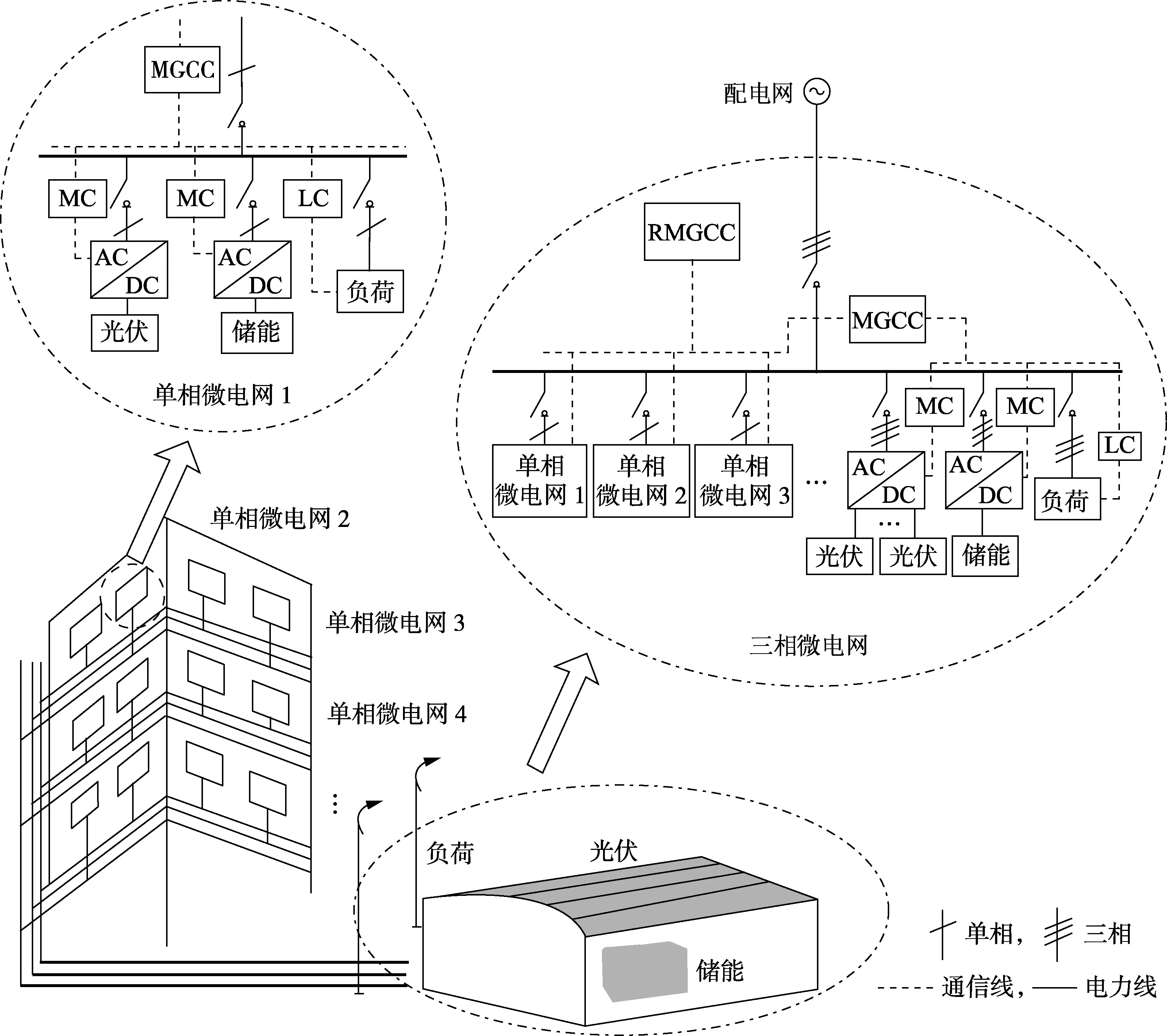
图1 单三相多微电网典型拓扑Fig.1 Typical topology of multi-microgrid with single-phase/three-phase architecture
在脱离配电网的情况下,单三相多微电网运行在区域自治模式,由具备足够备用容量和调压/调频能力的微源作为系统主电源运行在VF控制模式,其余储能变流器和光伏逆变器采用PQ控制模式运行。
本文中微电网采用目前应用较为广泛的多微电网集散式分层控制架构,根据控制响应需求可分为以下3层。
a. 多微电网层:由区域型微电网中央控制器RMGCC(Regional MicroGrid Central Controller)担任,负责进行整个多微电网系统的集中式全局优化调度。
b. 子微电网层:由微电网中央控制器MGCC(MicroGrid Central Controller)担任,可以实现分散式的子微电网内部自治控制。
c. 单元层:由底层本地控制器组成,包括负荷控制器LC(Load Controller)和微源控制器MC(Microsource Controller),主要负责数据采集和控制实现。
为了方便讨论,本文规定以源、荷、储及子微电网各系统电能注入母线的功率方向为正,反之为负。
为了保证整体储能系统始终具备可调裕量以吸纳多微电网系统内的瞬时波动功率,设置4个临界值将储能的荷电状态SOC(Stage Of Charge)划分为5个区间,在不同区间内储能的充放电功率限制不同[16]。
a. 状态区间1[0,SOCmin1]内储能的充放电功率限制为:
[-Pmax,0]
b. 状态区间2(SOCmin1,SOCmin2]内储能的充放电功率限制为:
c. 状态区间3(SOCmin2,SOCmax2)内储能的充放电功率限制为:
[-Pmax,Pmax]
d. 状态区间4[SOCmax2,SOCmax1)内储能的充放电功率限制为:
e. 状态区间5[SOCmax1,1]内储能的充放电功率限制为:
[0,Pmax]
其中,SOCmin1、SOCmin2分别为电池过放下限值和电池过放预警值;SOCmax1、SOCmax2分别为电池过充上限值和电池过充预警值;Pmax为储能的最大充放电功率。
根据上述状态分区方法可以得到储能系统实时SOC对应的充放电功率限值。
定义Pnet为子微电网出口处联络线功率,其满足如下等式约束条件:
∑PBS+∑Ppv+∑PLd+Pnet=0
(1)
本文定义指标MGi={Pdis,Pch}表示各子微电网的运行稳定裕度,其中Pdis、Pch如式(2)所示。
(2)
其中,Pdis和Pch分别为该子微电网的最大放电和充电功率;Ppv_l(l=1,2,…,L)、PLd_m(m=1,2,…,M)分别为该子微电网内第l个光伏设备、第m个负荷的最大功率值,L、M分别为该子微电网内光伏逆变器、负荷的数量;PdisBS_n、PchBS_n(n=1,2,…,N)分别为该子微电网内第n个储能装置的最大放电功率和最大充电功率,N为该子微电网内储能变流器的数量。各子微电网满足式(1)所示的等式约束条件。
运行稳定裕度MGi={Pdis,Pch}表明了该子微电网的有功消纳调节能力:
a. 当Pdis>0且Pch<0时,说明该微电网既可输出功率又可输入功率,在稳定裕度内能够自我调节,实现基于稳定裕度的分散式控制;
b. 当Pdis、Pch均大于0时,说明电源类功率过额,可对光伏进行限制,由于光伏的功率特性可对其进行连续功率调节,以最小光伏限制量为调节原则;
c. 当Pdis、Pch均小于0时,说明电源类功率短缺,需对负荷进行限制,由于负荷功率特性可对其进行离散功率调节,以最小负荷限制量为调节原则,并考虑负荷重要等级。
2 实时MPC
本文针对区域自治型单三相多微电网,提出一种基于MPC的分散式实时控制方法,通过源、荷、储的功率调节实现各子微电网在自身稳定裕度内的分散自治,同时保证三相不平衡度满足系统要求。
2.1 MPC算法
MPC是一种基于模型的有限时域闭环优化控制方法,其算法的核心是滚动时域(receding horizon)策略,采用多步预测、滚动优化和反馈校正等控制策略,因此其具有控制效果好、鲁棒性强、对模型精确性要求不高的优点。MPC在实际工程中能够克服工业控制过程中的非线性、不确定性和时变性,并能方便地处理控制过程中控制变量和状态变量的各种约束,因此在工业控制中得到了成功的应用[17]。
MPC的闭环控制结构主要由预测模型、滚动优化、反馈校正三部分组成。
a. 预测模型。
在预测控制理论中,预测模型是一个描述系统动态行为的基础模型,具有预测的功能,即能够根据系统的历时数据和未来的输入预测系统未来的输出值。预测模型实际上只注重预测的效果,对模型的精确度要求不高,也不注重模型的形式。MPC的思想与具体模型无关,但是其实现与模型有关。
b. 滚动优化。
MPC采用滚动式的有限时域优化策略,如图2所示。根据该时刻的优化性能指标,将控制问题转化为优化问题进行求解,求解该时刻起有限时域内的优化预测序列,并在当前时刻执行,在下一采样时刻重新对系统的实时状态进行采样,继续求取最优控制序列,因此起到了一定的反馈修正作用,确保滚动优化具有更好的稳定性和鲁棒性。
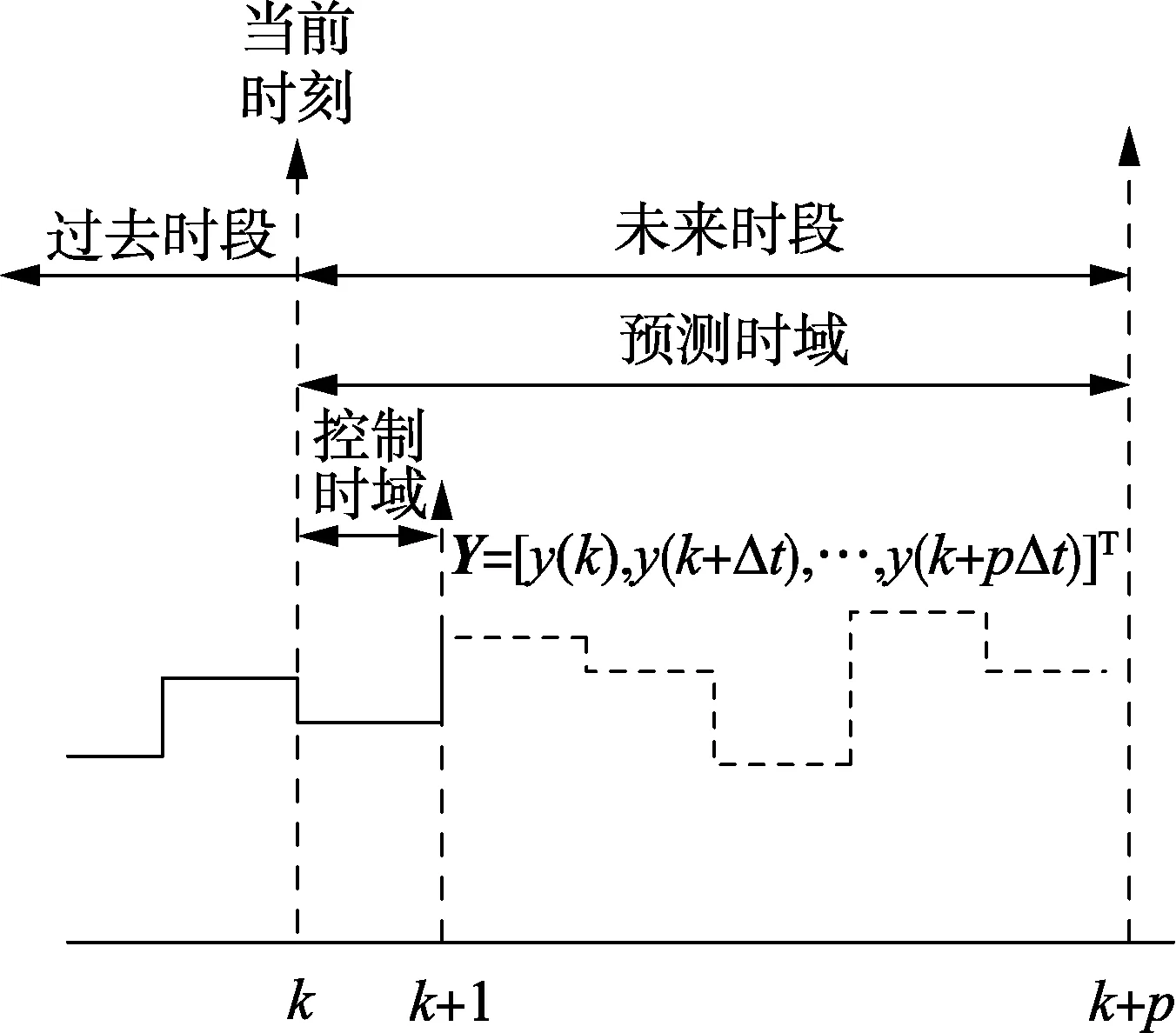
图2 有限时域滚动优化策略Fig.2 Rolling optimization strategy in finite time domain
c. 反馈校正。
由于实际被控过程中的对象和环境存在非线性、不确定性和时变性的特点,预测输出与实际输出不可能完全相等,因此构成了预测误差,需要采用反馈的方式,引入误差校正,构成闭环优化。反馈校正主要体现在两方面:① 在每一采样时刻,以系统实时状态为基点,修正预测模型,继续滚动优化;② 控制实施后,实时根据系统实际输出通过各种反馈策略进行补偿。
2.2 考虑三相不平衡的多微电网实时MPC
在单三相多微电网中,由于单相光伏电源和单相负荷的不均衡接入,三相电流不平衡问题更值得考虑。为了降低三相不平衡现象对多微电网系统造成的不利影响,当各子微电网进行分散式实时控制时,还应满足实际应用对系统三相不平衡度的要求。
由文献[14]可得,三相电流不平衡度不应超过15%,因此有如下不平衡约束条件:
(4)
其中,I1为三相电流正序分量的方均根值;I2为三相电流负序分量的方均根值。经推导[18],可得式(5)所示的由负荷功率表示的三相电流不平衡度公式。
(5)
(6)
其中,PA、PB、PC和QA、QB、QC分别为三相有功和无功功率;SL、SL2和PL2、QL2分别为正、负序视在功率及负序有功、无功功率。
基于多微电网分层控制架构,为了使各相序单相子微电网群在满足三相不平衡度要求的情况下进行实时控制,各MGCC必须以上级RMGCC经区域全局协调优化给定的联络线功率为参考值进行跟踪,在预测时域内使实时联络线功率与给定参考值的偏差最小,并基于此目标构建预测模型进行滚动优化和反馈校正[19]。
本文所提基于MPC的分散式实时控制流程如图3所示。
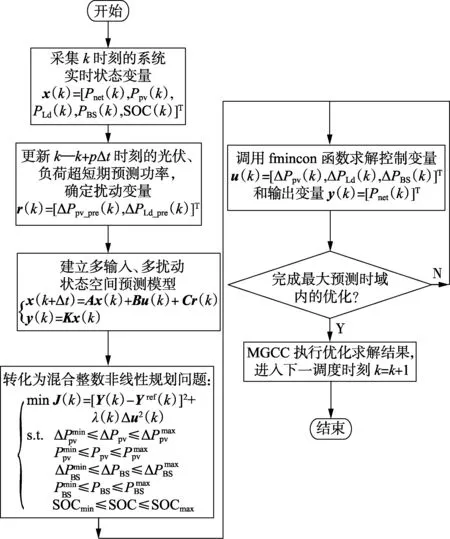
图3 基于MPC的实时控制流程图Fig.3 Flowchart of real-time control based on MPC
根据微电网每一时刻的功率平衡方程和SOC迭代方程,选取联络线功率、负荷功率、光伏发电功率、储能装置充放电功率和储能SOC构成的向量x(k)=[Pnet(k),Ppv(k),PLd(k),PBS(k),SOC(k)]T为状态变量,以负荷功率、光伏发电功率、储能装置充放电功率三者的增量构成的向量u(k)=[ΔPpv(k),ΔPLd(k),ΔPBS(k)]T为控制变量,以光伏、负荷的超短期预测功率增量构成的向量r(k)=[ΔPpv_pre(k),ΔPLd_pre(k)]T为扰动输入,以联络线功率构成的向量y(k)=[Pnet(k)]T为输出变量,则建立的多输入、多扰动状态空间模型为:
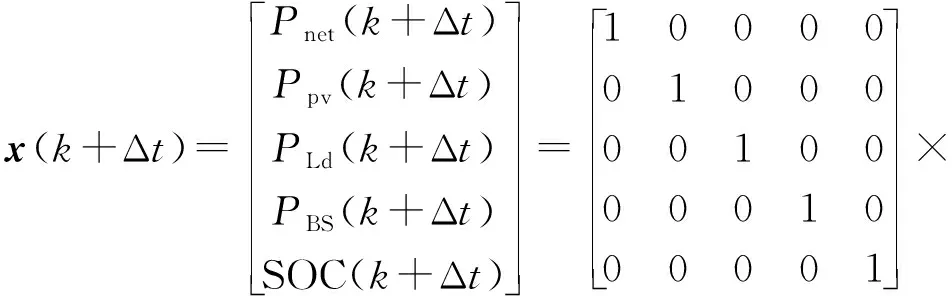
(7)
y(k)=[Pnet(k)]T=
(8)
上述模型可简化为:
x(k+Δt)=Ax(k)+Bu(k)+Cr(k)
(9)
y(k)=Kx(k)
(10)
基于系统实时状态和光伏、负荷功率超短期预测,以1 min为周期进行滚动修正,在最大预测长度的有限时域内对状态空间预测模型进行迭代,则在最大预测长度pΔt内的预测输出值构成的向量为:
Y=[Pnet(k),Pnet(k+Δt),…,Pnet(k+pΔt)]T
(11)
在分散式实时控制过程中为了保证多微电网系统的三相不平衡度仍然满足要求,因此必须对上级RMGCC给定的联络线功率进行跟踪,以全局协调优化给定的联络线功率在最大预测长度pΔt内构成的向量:
(12)
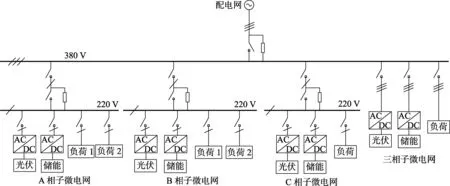
图4 多微电网拓扑结构Fig.4 Topology structure of multi-microgrid
为了使预测输出值尽量接近期望值,该算法的控制增量通过使最优化准则式(13)的值最小来达到优化控制效果。
J(k)=[Y(k)-Yref(k)]2+λ(k)Δu2(k)
k=1,2,…,p
(13)
其中,λ(k)为控制加权系数,取λ(k)=λ(常数)。式(13)以RMGCC给定的联络线功率为参考值,在最大预测长度内使得实时联络线功率与给定参考值的偏差最小,同时考虑了控制变量的增量最小,即光伏弃光量、负荷切除量和储能调节跃变量最小。由于光伏发电功率调节的连续性、负荷切除功率的离散性和优化目标函数的非线性,将MPC中的实时滚动优化调度转化为混合整数非线性规划问题:
(14)
式(14)所示的非线性规划问题具有多种求解方式,既可利用传统数学解析规划方法进行求解,也可利用新兴的启发式智能优化算法进行求解,如遗传算法、粒子群优化算法及模拟退火算法等。但在分散式实时控制中,优化目标和系统参数相对单一,而且实时控制对算法运算求解速度的要求较高,为了更加准确、快速地寻找到最优解,可调用MATLAB优化工具箱中的非线性规划fmincon函数进行求解。求解后便可得到在最大预测时域内的联络线功率以及源、荷、储功率,并在当前时刻由MGCC执行对源、荷、储功率的调节,然后进入下一调度时刻。
由于光伏发电功率和负荷功率预测精度的限制,超前的MPC无法保证光伏发电功率、负荷功率与预测值相同,从而导致超前下发的预测输出与实际输出存在误差。因此需要引入反馈校正环节,进入下一调度时刻时重新对系统实时状态参数进行采集,同时对光伏、负荷超短期预测功率进行更新,重复优化过程,实现滚动优化。上述对系统实时状态进行滚动更新的过程为反馈校正的一部分,另外对于MPC预测输出中的光伏发电功率和负荷功率可能与实际输出存在误差的情况,由系统主电源进行平抑,修正误差,并作为下一时刻的预测初值在预测模型中进行优化。反馈校正的引入使控制过程构成一个闭环反馈系统,能有效地提高控制性能,确保滚动优化策略具有更好的鲁棒性和稳定性。
3 实例分析
为了验证所提区域自治型单三相多微电网实时MPC策略的有效性,本文以广东省绿色能源技术重点实验室CET Lab(Guangdong Key Laboratory of Clean Energy Technology)多微电网实验平台作为分析对象,基于DIgSILENT PowerFactory 15.0平台搭建单三相混联型结构多微电网仿真系统,其拓扑结构及参数分别如图4及表1所示。
算例充分考虑了基于自身稳定裕度进行功率调节时可能出现的功率超额和功率短缺2种极端场景,相应地必须采取弃光伏和切负荷的应对措施,以保证系统功率平衡。各MGCC基于MPC进行分散式实时控制,响应光伏和负荷功率波动,同时保证联络线功率波动在允许范围内以保证系统三相不平衡度满足要求。
实时MPC中每个预测周期为1 min,采样点间隔为5 s,即控制步长Δt=5 s,每个预测时域内共有12个采样点,且仅在当前时刻执行优化结果,在下一采样点进行滚动优化。
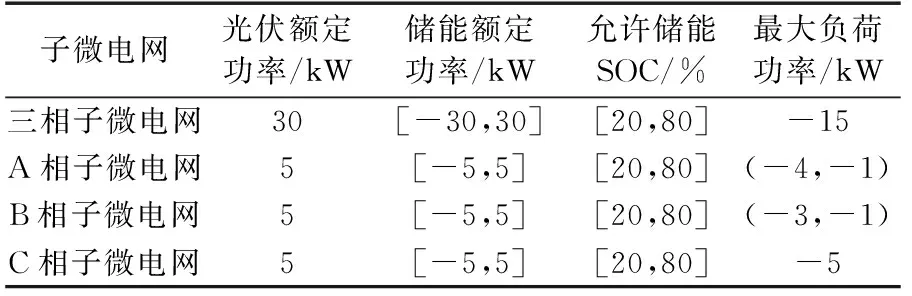
表1 各子微电网参数Table 1 Parameters of each microgrid
选取0~120 s进行实例分析,各MGCC根据预测数据和实时采集的状态信息进行基于MPC的实时控制进而调节源、荷、储功率,则t=0时刻预测时域可至t=60 s并在0~5 s下达控制指令。假定当前预测周期内上级RMGCC给定的各单相子微电网联络线功率均为1 kW;三相、A相、B相和C相MGCC在初始时刻实时采集的储能系统SOC分别为62.0%、19.0%、68.8%、80.0%。
光伏、负荷超短期预测功率和光伏、负荷实际功率如图5所示,MGCC在每一调度时刻采集实时光伏、负荷功率,并基于1 min内的预测数据进行预测时域内的源、荷、储功率预测,在控制步长0~5 s内下发控制指令。在所选时段内,以联络线功率波动最小为控制目标使系统三相不平衡度满足要求,同时以弃光量和切负荷量最小为调度原则,基于MPC算法根据光伏、负荷功率波动和储能SOC实时变化情况迅速响应进行源、荷、储功率调节。联络线功率、储能功率以及系统三相母线电压和频率波形如图6所示(图中电压为标幺值)。各子微电网中储能SOC如图7所示。
由图可见:三相子微电网的SOC为62.0%,稳定裕度满足Pdis1>0且Pch1<0,因此其能够在稳定裕度内基于MPC进行自我调节;A相子微电网中储能装置的SOC偏低,储能放电功率受限,MPC算法根据功率平衡发出切负荷指令,0~20 s、70~90 s、100~110 s内均需要切除次要负荷;B相子微电网中储能装置的SOC和子微电网的稳定裕度均符合要求,因此其能够在稳定裕度内基于MPC进行自我调节以维持联络线功率不变并平抑光伏和储能功率波动;C相子微电网中储能装置的SOC偏高,储能充电功率受限,子微电网的功率过额,无法消纳全部光伏发电功率,在维持联络线功率波动最小的前提下尽量保证高可再生能源利用率,但仍需要采取大幅限电、弃光措施。
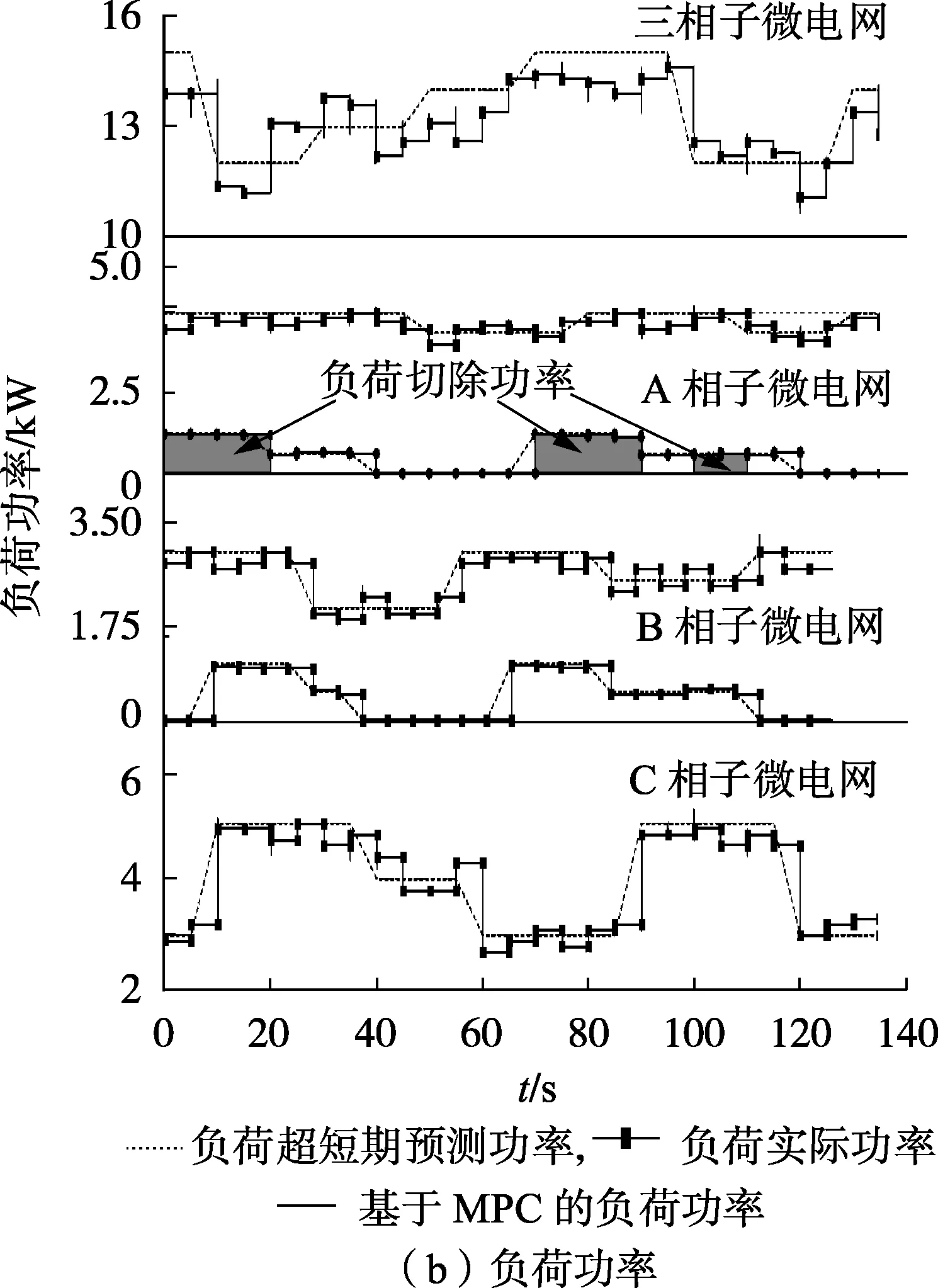
图5 光伏、负荷功率波形图Fig.5 Waveforms of PV and load power
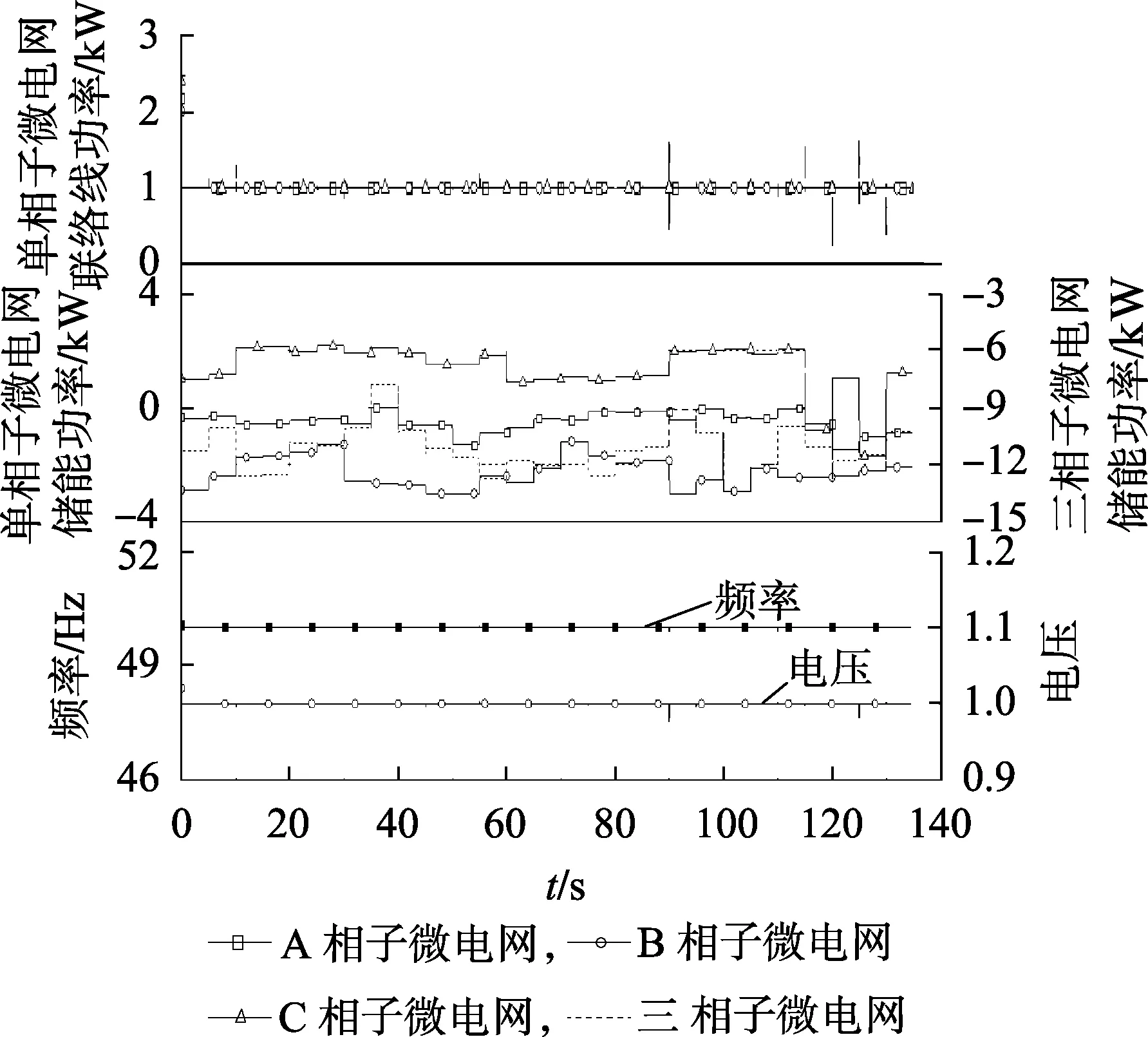
图6 基于MPC的实时控制仿真波形Fig.6 Simulative waveforms of real-time control based on MPC
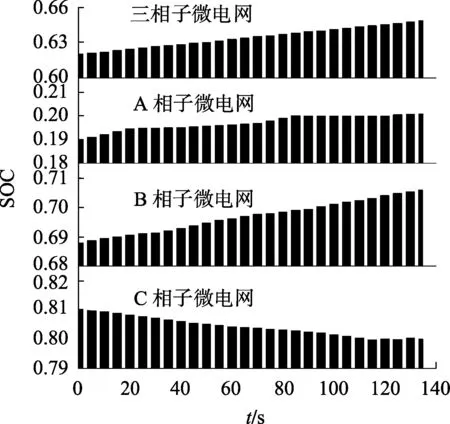
图7 各子微电网中储能SOC变化情况Fig.7 SOC of energy storage in each microgrid
图5、6的仿真结果表明所提实时控制策略能够在各子微电网内部根据光伏和负荷波动及储能SOC迅速响应进行源、荷、储功率调节。其中,三相、A相和B相子微电网的光伏发电功率控制曲线与实际发电功率曲线基本吻合,保证了系统整体具有较高的光伏利用率,并且联络线功率基本维持在给定值,保证了系统三相不平衡度满足要求,同时系统三相母线电压和频率的波动也在允许范围内,系统电能质量稳定、可靠。图7说明所提策略能实时跟踪储能SOC进行有效调度,确保SOC不超过安全限值,保证设备安全可靠运行。
上述结果充分说明了本文所提MPC策略在区域自治型单三相多微电网实时控制中的有效性。
4 结论
针对区域自治型单三相多微电网,提出一种基于MPC的实时控制策略。所提策略根据多微电网集散式控制架构,考虑三相不平衡度,以实时联络线功率与给定参考值偏差最小为控制目标,构建多输入、多扰动、多变量的动态预测模型,再将其转化为混合整数非线性规划问题进行求解,同时引入反馈校正环节进行预测误差修正,实现滚动式的有限时域闭环优化。仿真结果表明:所提策略可实现区域自治型单三相多微电网实时平抑源、荷出力波动,实时调节源、荷、储功率,跟踪联络线功率以满足三相不平衡度约束;验证了所提控制策略的有效性和鲁棒性,表明其有利于区域微电网群的规模化推广。
猜你喜欢
山东交通科技(2020年2期)2020-08-13
哈尔滨铁道科技(2020年4期)2020-07-22
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2020年9期)2020-02-06
中国新技术新产品(2017年1期)2017-01-20
科学与财富(2016年28期)2016-10-14
电测与仪表(2015年12期)2015-04-09
上海电机学院学报(2015年3期)2015-02-28
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
