Micro-CT系统的设计
2018-09-12 00:51鄢苏鹏刘正明
中国医疗设备 2018年9期
鄢苏鹏,刘正明
解放军第一医院 医学工程科,甘肃 兰州 730000
引言
Micro-CT(也称为显微CT)被定义为测定体素的空间分辨率小于100 μm的CT系统[1]。它采用了与普通临床CT不同的微焦点X线球管,分辨率高达几个微米,具有良好的“显微”作用[2]。Micro-CT能够在不破坏样品的情况下,对骨骼、牙齿、活体小动物和各种材料器件进行高分辨率(<10 μm)X线成像,获取样品内部详尽的三维结构信息,从而显示各部分的三维图像,分辨率远远高于临床CT[3-5]。除了生物学、医学、新药开发和材料学的应用之外,Micro-CT还广泛应用于工业、农业、工程、珠宝、古生物学和考古学等领域[6]。
目前市面上的成品Micro-CT系统,多是用来对离体组织或者活体小鼠成像,成像视野小,管电压小,不能对大动物或大物体进行成像[7]。而本研究就是要设计一种大视野、大管电压的Micro-CT系统,用于兔子的成像。Micro-CT一般包括X线管、探测器和机械装置等[8]。Micro-CT的基本原理是:X射线源连续的产生锥形束X射线,穿过载物台上的被测物体,在探测器上成像。探测器后端连接电脑数据采集系统,旋转一周依次得到被测样本在不同角度下的二维投影图像序列。对得到的投影序列根据需求进行图像预处理,之后对投影图像序列进行断层重建,得到断层图像序列。将断层图像序列使用各种可视化方法显示出来。
1 系统的硬件设计
1.1 系统类型
Micro-CT系统主要由X射线源、X射线探测器和机械扫描结构等3部分组成,并由一台计算机作为控制处理单元实现系统的整体控制[9]。根据系统的机械结构的不同,将系统分为转台式和转桶式两种,见图1。两种系统类型的对比,见表1。
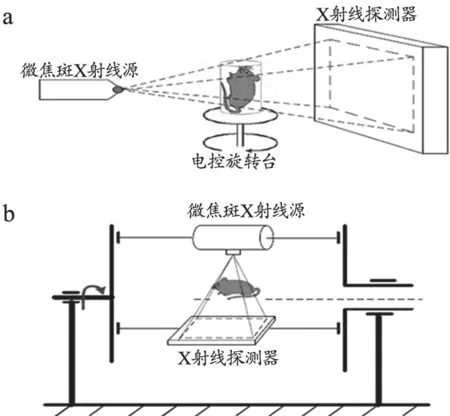
图1 Micro-CT的机械扫描结构转台式(a)转桶式(b)

表1 两种系统类型的比较
在我们设计的系统中,采用转台式的扫描方式。利用一个电控旋转台,控制物体的旋转,利用多个电控位移台,实现物体的前后左右的移动。这样不仅实现方便,调整简单,而且能达到较高的空间分辨率[2]。
1.2 X线管和探测器的选择
系统所能达到的最高空间分辨率受到系统焦斑大小、探测器像素大小、机械稳定性、系统几何放大倍数、重建算法等多种因素的影响,其中设备的硬件参数起着更为决定性的作用。设X射线源的焦斑大小F,探测器像素大小d,用SDD和SOD分别表示X射线源到探测器中心和到物体的距离,参见图2,定义系统的放大倍数为M=SDD/SOD,则射线的等效束宽BW[2]可表示为:

BW从物理上确定了系统可能达到的极限分辨率。
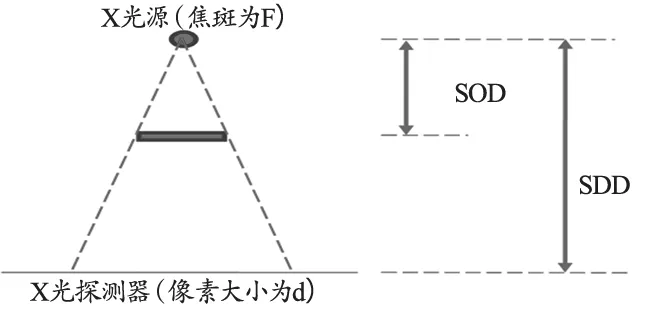
图2 Micro-CT系统几何位置示意图
X线管在选择时,管电压在足够大,能够穿透兔子的情况下,焦点的大小要尽可能小,以使成像的结果尽可能好,3款均满足要求(表2)。
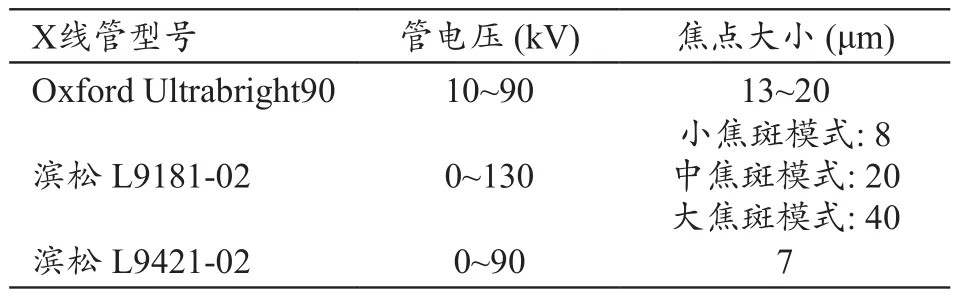
表2 不同的X线管
探测器在选择时,因为要保证大视野(大于10 cm),所以探测器的尺寸要大,而且探测器像素的大小要尽量小,以使确保成像质量,同时读出速率也不能低,不然采集时间过长,照射剂量太大,导致兔子死亡,会使活体成像没有意义,3个测试款探测器均满足要求(表3)。
将以上的X线管和探测器两两组合起来,选定视野直径为15 cm,计算其系统的极限空间分辨率,见表4。
可以看出来,L9421-02和2923的组合,其保证15 cm视野的情况,系统的极限空间分辨率在这些组合里是最小的,但是考虑到成本的问题,我们选择了Ultrabright 90和2321,系统能达到的最小空间分辨率为49.2423 μm,能够实现高分辨率、大视野的目标。
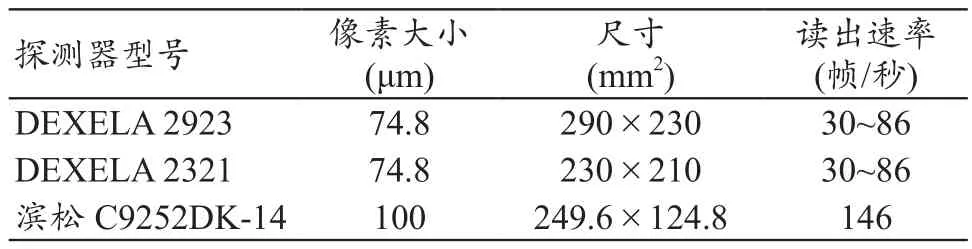
表3 不同的探测器
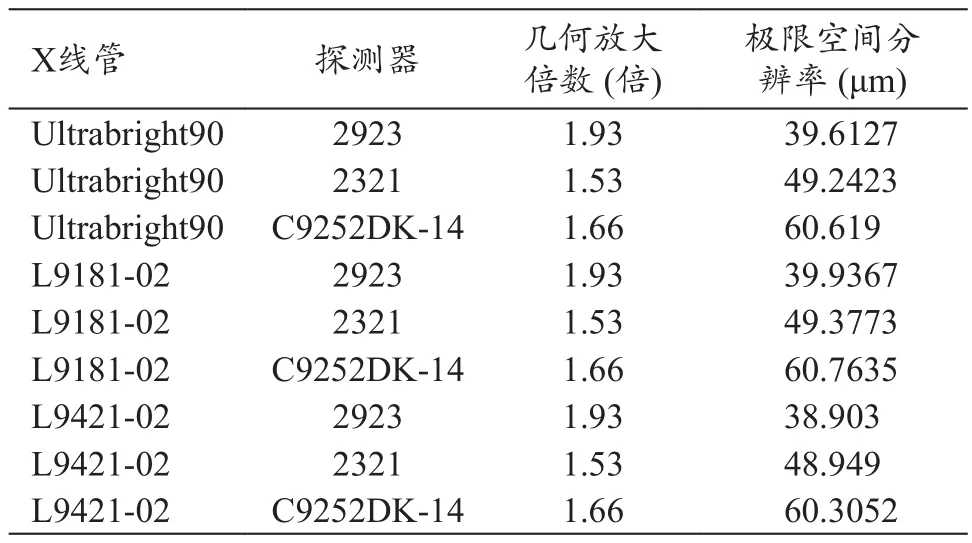
表4 不同X线管和探测器组合系统极限空间分辨率的情况
1.3 SOD和SDD的设计
源到物体的距离SOD和源到探测器的距离SDD是系统的安装时必要考虑的两个量,它们决定了源、物体、探测器之间的相对关系。当探测器尺寸一定且需要的视野一定时,则系统的几何放大倍数M就确定了,则SDD/SOD的值也确定了。但如果SDD太大的话,会使到达探测器的X线光子数目减少,降低对比度分辨率[9];如果SDD太小,为保证重建结果,锥角控制在10°以下,则视野变小,探测器成像面积没有有效利用。
如图3所示,为了有效利用探测器的面积,而且为了保证成像质量,要求锥角θ小于10°[10],所以SDD、θ、探测器宽度A满足如下关系:


图3 计算SDD的示意图
2 系统的软件设计
2.1 FDK重建算法
FDK算法,它由Feldkamp等[11]在1984年提出,因其易于实现、执行效率高等优点,在圆轨道锥束CT中广泛应用。FDK算法是一种解析的近似重建算法,在锥角比较大的时候存在锥束伪影,为了解决锥束伪影问题,很多人提出了改进的FDK算法[12]。在锥角比较小的情况下,FDK重建结果比较好。使用FDK 算法重建时,必须在360°扫描范围内具有充足的投影数据,否则图像中将产生伪影[11]。
锥束CT扫描几何结构,见图4。设射线源到旋转中心的距离为R,射线源到探测器距离为D,称射线源到探测器中心且与探测器垂直的射线为中心射线,FDK算法重建公式为:

其中gI(u,v,λ)代表投影数据,λ为投影角度,(u,v)为虚拟探测器的横、纵坐标;ξ为从射线源出发过点x→的射线与中心射线的夹角,斜坡函数;; 反 投 影 需 要 加 权
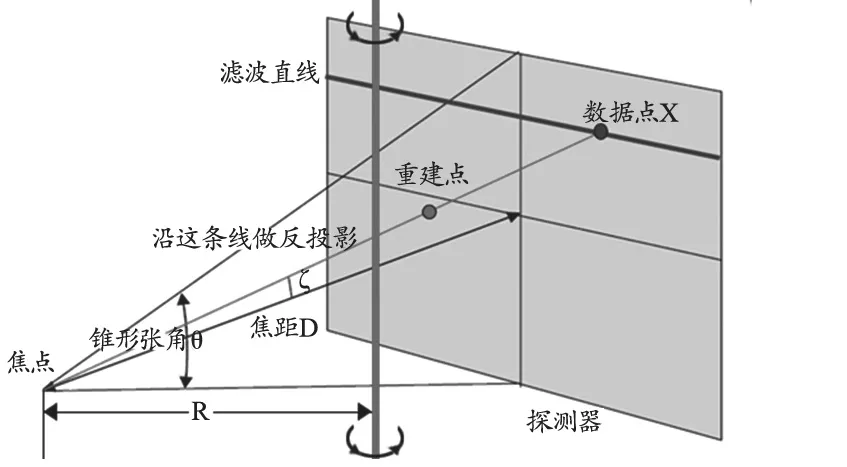
图4 锥形束重建算法的坐标系
2.2 程序流程及各模块说明
(1)预处理。对各数据点做预处理,乘以cosξ,ξ是指数据点到源的连线和中心点到源的连线的夹角。
(2)滤波。若选择no filter(无滤波器),则只进行算法中的斜坡滤波,如果选择滤波器,则还要使用用户选择的滤波器对数据进行滤波,滤波均是通过卷积实现[13]。
(4)输出。重建完成之后,根据用户输入的路径保存重建图像,同时可以在程序右上方浏览各层的图像,还可以将各层图像保存。
2.3 重建结果展示
重建程序,见图5。投影数据使用3D phantom模型(3D SHEPP-LOGON模型)仿真投影,该模型在CT算法仿真实验和性能评价中被普遍采用[14]。重建后选取的四层图像,见图6。从这四幅图中可以看出,重建算法很好地体现了不同层面之间的不同,而且各层面成像结果也很清楚。
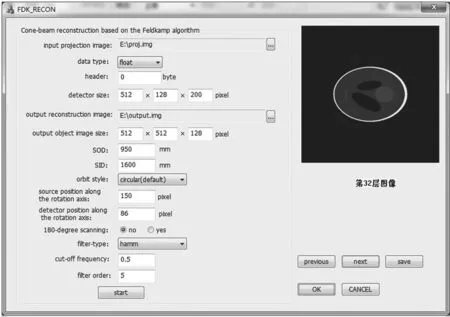
图5 重建程序界面
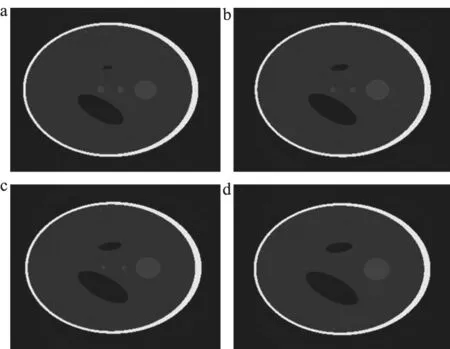
图6 不同层面的成像结果
3 结语
本研究设计的Micro-CT系统,成像视野大,管电压大,能够满足对于活体兔子成像的实验需求,弥补了市面上成品Micro-CT成像视野小、管电压小、价格昂贵、不能满足特定实验需求的缺点。
但因安装过程会导致系统几何位置产生误差[9],而误差对成像效果有较大的影响,重建图像中将会出现伪影,严重时将导致重建结果没有意义[15]。因此,下一步重点将针对系统安装完成后的几何位置误差,进行校正方法的软件设计与实现。同时,还可对重建算法进行进一步优化,引入并行计算,提高重建速度[16]。
[参考文献]
[1] 桂建保,胡战利,周颖,等.高分辨显微CT技术进展[J].CT理论与应用研究,2009,18(2):106-116.
[2] 朱守平.微型计算机断层成像及其与自发荧光断层成像多模态融合的研究[D].北京:中国科学院自动化研究所,2010.
[3] 王燕芳,王杰,魏存峰,等.锥形束显微CT技术在颞骨成像中的应用及发展[J].中国耳鼻咽喉头颈外科,2015,22(6):280-283.
[4] 许可,李谨.显微CT在评价根管预备效果中的应用[J].口腔医学,2016,36(7):653-656.
[5] 杨曦,徐永清,何晓清.显微CT对小动物血管三维成像的研究进展[J].中国骨与关节损伤杂志,2016,31(3):334-336.
[6] 谷舟,杨益民,齐雪义,等.显微CT技术在古代料珠研究中的应用—以河南淅川县马川墓地出土料珠为例[J].CT理论与应用研究,2014,23(5):797-803.
[7] 刘文磊.低剂量CT成像与稀疏角度重建研究[D].西安:第四军医大学,2013.
[8] 张求德.基于旋转机架的小动物锥束CT系统设计与开发[D].武汉:华中科技大学,2016.
[9] 杨孝全,邓勇,邓子林,等.基于平板探测器的小动物微型CT成像系统[J].中国医疗器械杂志,2009,33(4):255-258.
[10] 张剑,陈志强.三维锥形束CT成像FDK重建算法发展综述[J].中国体视学与图像分析,2005,10(2):116-121.
[11] 李真真,杜明辉.锥形束重构解析算法的研究进展[J].中国生物医学工程学报,2007,26(2):308-312.
[12] 刘辉,张权,刘祎,等.锥束FDK反投影重建算法的三角函数优化[J].计算机工程与应用,2017,53(19):179-183.
[13] 洪振厚,周彬,郭金川.锥束X射线CT图像重建的新型滤波函数[J].深圳大学学报理工版,2017,34(3):284-289.
[14] 曹涵,胡战利,方方.锥束CT系统的3D Shepp-Logan体模仿真及其投影数据重建[J].信息通信,2014,(134):48-49.
[15] 陈炼,吴志芳,刘锡明,等.锥束CT系统几何参数校正的解析计算[J].清华大学学报:自然科学版,2010,(3):418-421.
[16] 郑海亮,李兴东,王哲,等.高分辨锥束CT并行重建算法在基于NVDIA GPU显卡计算平台上的实现[J].CT理论与应用研究,2014,23(5):805-814.
猜你喜欢
机电安全(2022年5期)2022-12-13
大众标准化(2022年19期)2022-11-02
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
中国建材科技(2020年2期)2020-10-29
科学(2020年1期)2020-01-06
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
中成药(2017年3期)2017-05-17
初中生世界·七年级(2016年2期)2016-03-03
中国科技纵横(2015年14期)2015-12-10
中国卫生(2015年12期)2015-11-10