
基于模糊识别的线阵扫描激光引信目标识别算法
2018-09-11 11:39郭淑玲
探测与控制学报 2018年4期
雷 蕾,刘 星,郭淑玲
(1.西安工业大学,陕西 西安 710021;2.西北工业集团有限公司,陕西 西安 710043)
0 引言
激光成像引信具有方向性强、分辨率高、抗电磁环境干扰能力强等优点,可迅速获取目标的三维轮廓信息,获得稳定的目标形状特征信息。线阵推扫式激光引信采用线阵APD光电探测器作为接收器件,在扫描过程中,可获取目标逐行像素的距离和强度信息,具有结构简单、成像速率高等优点,对低速和高速运动目标均可进行快速成像[1]。在应用于掠飞弹药平台时,这种成像方式具有较大的探测视场,成像效率明显高于单元探测器的二维旋转扫描方式,且成本较低,符合引信产品的设计要求。同时由于线阵探测器阵元数目多,通过不同的布局结构设计能获得较高分辨率的图像,使引信具备目标易损部位的识别功能,提高了弹药的毁伤能力。激光成像引信是目前近场探测技术研究的重要方向。
激光三维成像作为一种新型的非合作目标三维图像获取技术,高效的回波信号处理和目标三维重构方法是提高其探测识别能力的前提[2]。目前对激光成像引信目标识别算法的研究主要分为基于图像特征的识别算法和基于模型匹配的识别算法两类。其中,模型匹配识别算法建立目标的CAD模型,通过目标与CAD模型进行匹配实现目标识别[3]。文献[4]通过获取目标几何形状特性,应用自旋图找到目标点与模型点之间的对应关系,再利用迭代最近点法实现目标与模型的匹配完成目标识别。基于图像特征的识别算法通过对目标图像进行特征提取,采用实测或仿真图像训练分类器实现目标识别。Koksal[5]提出一种基于统计模型的目标识别方法,应用边缘跟踪提取目标距离像的轮廓边缘作为特征,然后建立特征的统计模型,通过与目标模型库作匹配实现军用车辆目标的识别。这两类识别算法均能获得较好的分类识别效果,但算法相对复杂,运算实时性难以满足弹载使用要求。本文针对上述问题,提出了基于模糊识别的线阵扫描激光引信目标识别算法。该算法通过对线阵扫描激光引信所得单次截面轮廓的关联度计算,应用模糊识别算法实现目标判别,算法实时性好,提高了目标匹配识别速率。
1 灰色关联分析
线阵扫描激光引信探测所得距离像可反映目标的截面形状信息,而灰色关联分析基本思想是根据序列曲线几何形状来判断不同序列之间的联系是否紧密[6]。对线阵扫描目标识别建模后,通过灰色关联分析对目标与待识别目标相对应截面的轮廓折线序列从几何形状、相对于始点的变化速率进行分析计算,最后通过灰色综合关联度得到两序列之间的相似程度。在序列趋势变化过程中,若两个序列因素变化的趋势具有一致性,即同步变化程度较高,即说明二者关联程度较高;反之,则较低。
1.1 灰色绝对关联度
设系统行为序列X1与X2的长度相同且皆为1时距序列X1=[x1(1),x1(2),x1(3),…,x1(n)];X2=[x2(1),x2(2),x2(3),…,x2(n)]的始点零化像分别为:
则,
(1)
(2)
(3)
(4)
称为X1与X2的灰色绝对关联度,简称绝对关联度[7]。
绝对关联度用于测度序列X1与X2在几何形状上的相似程度。X1与X2在几何形状上越相似,ε12越大,否则越小[8]。
1.2 灰色相对关联度

则,
(5)
(6)
(7)
(8)

灰色相对关联度是序列X1与X2相对于始点的变化速率之间联系的表征,X1与X2的变化速率越接近,γ12越大,否则越小[8]。
1.3 灰色综合关联度
设序列X1与X2长度相同且初值不等于零,ε12和γ12分别为X1与X2的灰色绝对关联度和灰色相对关联度,θ∈[0,1],则称
ρ12=θε12+(1-θ)γ12
(9)
为X1与X2的灰色综合关联度,简称为综合关联度[9]。
灰色综合关联度既体现了折线X1与X2的相似程度,又反映出X1与X2相对于始点的变化速率的接近程度,是较为全面地表征序列之间联系是否紧密的一个数量指标。一般地,可取θ=0.5,如果对绝对量之间的关系较为关心,θ可适当取大一些;如果对变化速率比较侧重,θ可取小一些。
2 线阵扫描目标识别方法
在线阵扫描激光引信对目标特征轮廓进行扫描的过程中,得到目标的轮廓信息矩阵。本文将标准目标轮廓信息矩阵模型与待识别目标所得到的扫描信息矩阵进行对比。采用灰色关联分析将信息矩阵中的列信息和行信息进行关联度分析,转化为隶属度。通过对M行信息和N列信息的隶属度计算,进而采用模糊综合评价最终得到目标的模糊识别结果。
2.1 线阵扫描目标识别模型
线阵扫描激光成像引信探测模式是通过线阵器件本身结构实现一维扫描,由引信载体的飞行实现另一维扫描而进行成像的[10],如图1所示。激光引信采用N元激光发射模块及线阵探测器,目标的反射回波信号经线阵探测器接收后,得到目标上对应N点的距离值[11]。随着载体的飞行得到目标轮廓各点的距离值,对得到的距离数据进行处理,经变换后可获得目标的真实轮廓数据,目标识别流程见图2。
图1 线阵扫描目标识别探测过程Fig.1 Detection process of linear array scanning target recognition
图2 目标识别流程框图Fig.2 Flow chart of target recognition
设目标的长宽高分别为L×W×H,激光引信的脉冲频率为f,线阵探测器的单元个数为N,线阵扫描激光引信平台在距离目标R高处对目标进行扫描,弹载平台的飞行方向与车辆目标保持水平。N元线阵探测器照射目标的N个点得到目标N个点的距离信息,将这探测一次的距离信息序列用向量形式表示为
X=(x1,x2,x3,…,xn)T
随着弹体的飞行,整体车辆目标探测会被线阵探测器扫描m次,扫描后得到m个距离信息序列,表示成序列矩阵为:
若激光引信对车辆目标横向扫描进行目标探测,则矩阵Xi的行信息为目标横截面折线序列,矩阵Xi的列信息为目标纵截面折线序列。同理,若激光引信对车辆目标纵向扫描进行目标探测,则矩阵Xi的行信息为目标纵截面折线序列,矩阵Xi的列信息为目标横截面折线序列。
由于战场环境中弹目交会角度和姿态多变,线阵扫描得到的目标三维轮廓信息矩阵需要通过坐标转换的方法将其转化为目标的标准轮廓信息矩阵再进行识别,本文讨论的矩阵为已经进行转化的目标标准三维轮廓信息矩阵。研究中将线阵扫描激光引信一次探测所得目标距离信息用向量形式表示,建立一个m行n列的距离信息矩阵,该矩阵涵盖车辆目标三维特征轮廓距离信息,通过对比目标与待识别目标相同截面的折线序列判断目标与待识别目标之间的相似程度,随后将通过设定的算法完成目标的识别。
2.2 线阵扫描目标识别机理
用线阵扫描激光引信对目标的标准模型进行横向(纵向)扫描,得到目标顶部高程信息规则库矩阵Xi,在对待识别目标进行扫描时,以同样的扫描方式得到待识别目标区域的顶部高程信息矩阵Xj。将矩阵Xi与Xj的列信息和行信息通过灰色关联分析得到两矩阵一一对应的单序列之间的综合关联度ρij。直到两个矩阵的所有列序列和行序列全部对比分析结束,得到(n+m)个综合关联度,并对其进行等级划分,其中a等级为ρij∈[0.95,1],b等级为ρij∈[0.8,0.95),c等级为ρij∈[0.7,0.8),d等级为ρij∈[0.6,0.7),e等级为ρij∈[0.5,0.6)。目标识别结束。
2.3 线阵扫描目标识别算法
1)建立因素集
因素集是指以影响评价对象的各因素为元素组成的集合。现有因素集为U=(u1,u2,…,un,un+1,…,un+m),评价因素集含有5个一级因素,记为U=(U1,U2,U3,U4,U5),其中U1,U2,U3,U4,U5分别表示“等级a、等级b、等级c、等级d、等级e”;同时有n+m个二级因素,将二级因素记为U1=(u1,u2,u3,…,uq1),U2=(u1,u2,u3,…,uq2),U3=(u1,u2,u3,…,uq3),U4=(u1,u2,u3,…,uq4),U5=(u1,u2,u3,…,uq5)。
2)建立评价集
评价集是指以评价主体为元素组成的集合。设有5个评价主体,构成评价集V=(v1,v2,v3,v4,v5),其中v1,v1,v2,v3,v4,v5分别表示“是目标,几乎是目标,像目标,不太像目标,不是目标”。
3)分配权重
二级因素中各因素的权重均相等,即
4)单因素评判
建立一个从U到V的模糊映射
ui
其中,0≤rij≤1,i=1,2,3,…,n+m,j=1,2,3,4,5。

(10)
(11)
(12)
(13)
(14)
其中,i=1,2,3,…,n+m。

则单因素评判矩阵为:
(φ=1,2,3,4,5;λ=q1,q2,q3,q4,q5)
作一级综合评判,考虑到二级因素均起作用,对所有因素依权重大小均衡兼顾,用加权平均模型模型
M=(·,+)
(15)
计算得
对于第一级因素集U=(u1,u2,u3,u4,u5),权重为W=(w1,w2,w3,w4,w5),令总单因素评判矩阵为:
作二级综合评判,得
根据最大隶属原则判断出目标的识别隶属度,设定当隶属度大于等于0.95时判断待识别目标即为所要识别的目标。
3 实验及仿真分析
实验过程中,对3种车辆目标进行具体轮廓测量,基于Matlab将激光引信所得数据进行仿真,得到目标空间三维几何特征的轮廓图像。线阵扫描激光引信对目标以及各待识别目标均以横向扫描的方式探测扫描,在垂直距离目标及待识别目标20 m处进行探测。现假设弹体平台飞行速度为200 m/s,线阵探测器为32元探测器,探测频率为10 kHz。
为验证算法的有效性,实验时建立了三组模型目标与待识别目标进行对比分析。图3中的第一个仿真模型图为输入标准对比目标的特征数据,记为目标1,第二个仿真模型图为待识别目标,记为目标2,图7中第二个仿真模型为待识别目标,记为目标3。则进行算法验证的三组对比模型分别为:目标1与目标2,目标1与目标3及目标1与其自身进行对比识别。
3.1 目标1和目标2
如图3所示为目标1与目标2通过Matlab将激光引信所得数据进行仿真得到的三维几何特征轮廓图像。
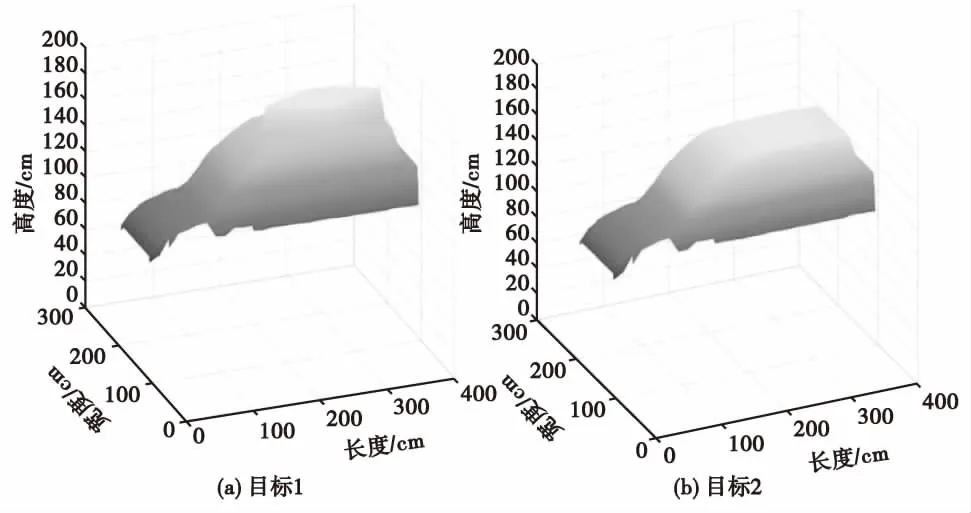
图3 目标1和目标2的空间三维几何特征轮廓图像Fig.3 Spatial 3D geometric feature contour images of target 1 and target 2
对目标1和目标2的数据矩阵Xi与Xj所对应的行和列进行灰色关联分析。基于灰色关联分析方法,通过灰色综合关联度ρij的大小对进行对比分析的两序列折线联系的紧密程度进行衡量。如图4所示,为目标1与目标2在横向扫描方式下的一处截面序列折线图,当两序列完全重合时,ρij的值达到0.996 7,接近于1。
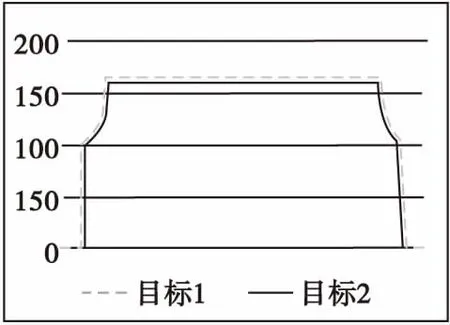
图4 目标1与目标2横向截面序列折线图Fig.4 Objective 1 and target 2 cross section sequence line diagram
在对所有目标1与目标2的序列折线图分析后可知,目标1与目标2的基本三维几何轮廓图像相同,不同之处在于目标1车辆顶部有菱形平台。现对车辆目标顶部截面折线图分析有,图5为菱形平台的部分变化趋势。
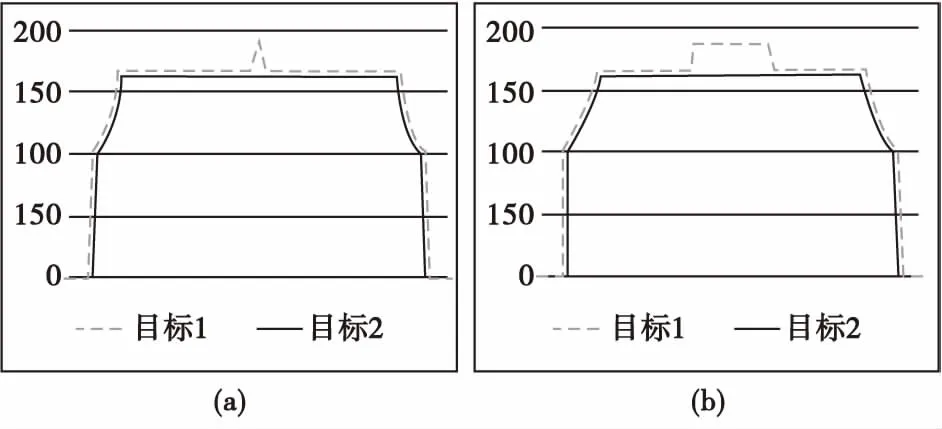

图5 菱形平台部分变化趋势图Fig.5 Trend diagram of partial variation of diamond platform
对具有变化趋势的两序列所得ρij进行分析如图6所示,通过灰色关联分析将菱形平台可以完全识别并得到正确的关联度。
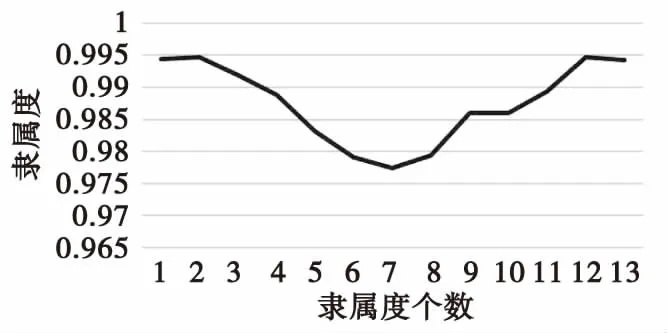
图6 菱形平台序列ρij变化趋势图Fig.6 The change trend of the diamond graph platform sequence ρ_ij


根据最大隶属原则可知目标1与目标2的隶属度为0.932 0,隶属度并未达到0.95,所以目标2与目标1并不是同一目标。
3.2 目标1和目标3
如图7所示为目标1与目标3的三维几何特征轮廓图像。
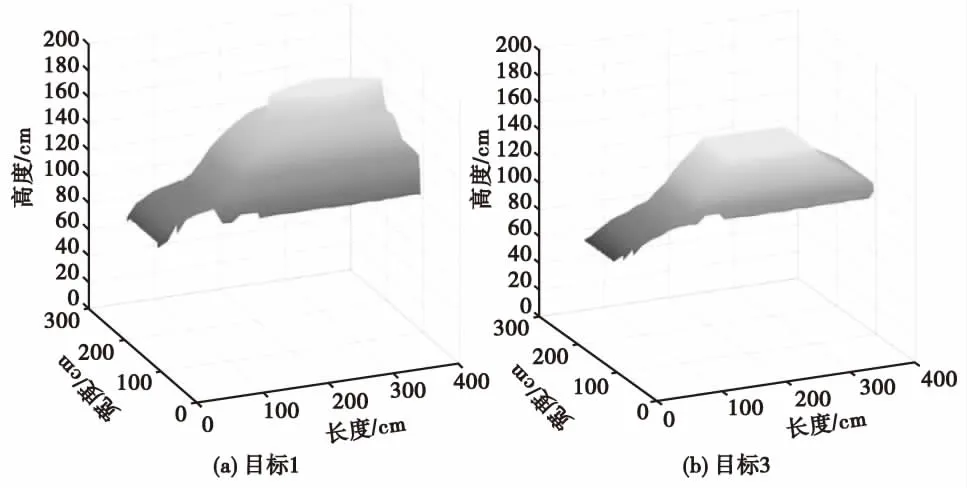
图7 目标1和目标3的空间三维几何特征轮廓图像Fig.7 Spatial 3D geometric feature contour images of target 1 and target 3
对所有目标1与目标3的序列折线图分析,即对目标1和目标3的数据矩阵Xi与Xj所对应的行和列进行灰色关联分析。图8为车顶部两个纵向截面序列折线图;图9是车前部分两个横向截面序列折线图;图10是在目标1菱形平台处目标1与目标3的横向截面序列折线图。灰色关联分析可以对各序列折线得到正确的关联度。
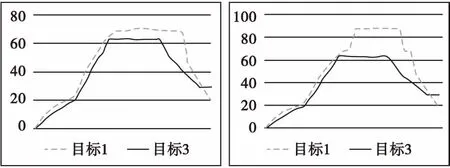
图8 目标1与目标3的车顶部纵向截面序列折线图Fig.8 Sequence line diagram of the longitudinal section of the vehicle top 1 and target 3
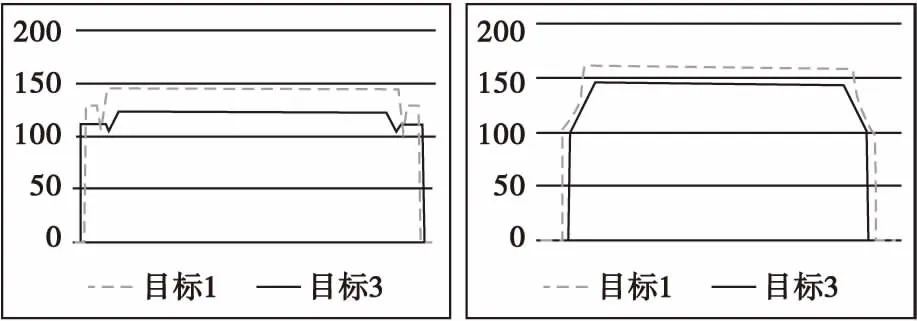
图9 目标1与目标3的车前部分横向截面序列折线图Fig.9 Sequence line diagram of the transverse section of the front part of the target 1 and target 3
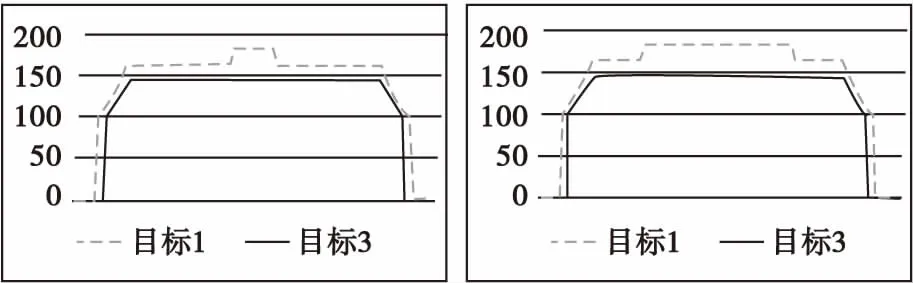
图10 目标1与目标3菱形平台处的横向截面序列折线图Fig.10 Crosswise cross section sequence diagram of target 1 and target 3 rhombus platform
通过灰色关联分析图表显示及对应的关联度知,目标1和目标3有着完全不同的轮廓特征,总体趋势不相同。在得到138个灰色综合关联度ρij后,将其进行等级划分,通过模糊综合评价对两目标整体上进行隶属度的判断。
灰色综合关联度ρij按照等级划分值被划分为5个等级,等级a有85个二级因素,二级因素权重均相同为1/85;等级b有30个二级因素,各因素权重为1/30;等级c与等级d均有9个二级因素,权重为1/9;等级e有5个二级因素,二级因素权重为1/5,即各级因素权重分配如表1所示。
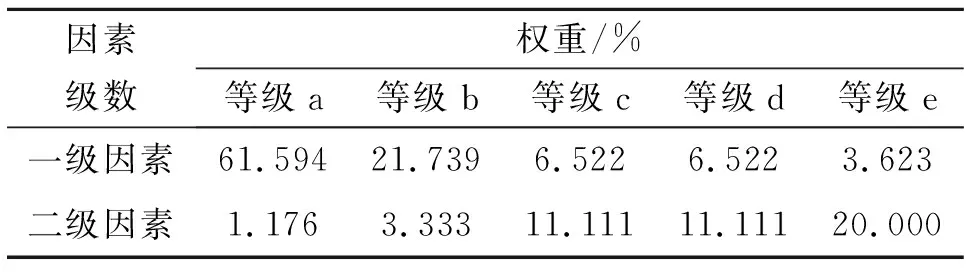
表1 各级因素权重值
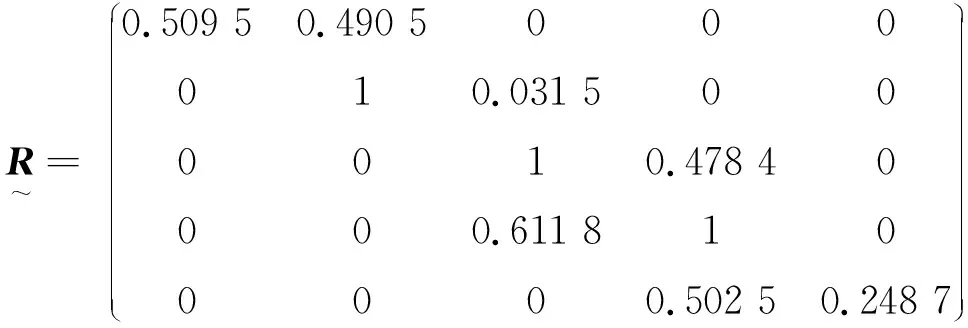
经模糊映射得到的二级因素的五个评判矩阵R1、R2、R3、R4、R5,则最终评判矩阵为:
即:
则
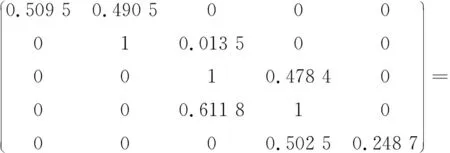
(0.018 5 0.083 0 0.200 3 0.558 1 0.153 2)
根据最大隶属原则得,目标1与目标3的最终隶属度为0.558 1,隶属度大小距0.95相差较远,可确定判断目标1与目标3不是同一目标。
3.3 目标1自身识别
基于目标1与其自身进行算法的验证,对数据矩阵Xi所对应的行和列进行自身灰色关联分析。通过灰色关联分析方法得到138对完全重合的两序列对比折线图,每对序列的ρij的值接近于1或等于1。将这138个灰色综合关联度ρij进行模糊综合评价,得到目标1与其自身的识别隶属度为1,即进行判定的目标是规则库中的目标,完成目标识别过程。
4 结论
本文根据线阵扫描激光引信的成像特点,提出了基于模糊识别的线阵扫描激光引信目标识别算法。该算法通过对线阵扫描目标识别模型进行数学建模,采用灰色关联分析计算目标与待识别目标单个轮廓关联度,进而应用模糊综合评价完成真实目标与待识别目标的判别。仿真结果表明该算法具有较好的目标识别及目标类型判别能力,特别适用于对目标识别算法实时性要求较高的弹目交会环境。本文提出的判定方法易采用微处理器实现,并可以通过调整扫描频率以适用不同的目标识别精度要求,也可根据战场需要预先设定目标类型,对目标的易损部位信息进行装定,实现对炸点的精确控制。
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
中草药(2022年17期)2022-09-05
小学生学习指导(低年级)(2020年3期)2020-06-02
时代英语·高一(2019年5期)2019-09-03
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25
体育科研(2016年5期)2016-07-31
为了孩子(3~7岁)(2016年8期)2016-05-14
