
一种改进的Canny图像分割算法
2018-09-06 01:53杨少令徐天雄
计算机与现代化 2018年8期
杨少令,刁 燕,罗 华,徐天雄
(四川大学制造科学与工程学院,四川 成都 610065)
0 引 言
图像分割在工业、公共交通、机器人视觉、生物医学等科学研究与工程技术领域有着广泛的应用。它既是图像处理中的一项关键技术,也是一个经典难题,发展至今仍没有找到一个通用的解决方法,更没有判断分割算法优劣的标准。
常用的边缘检测算子包括Robert算子[1]、Sobel算子[2]、Prewitt算子[3]以及高斯-拉普拉斯算子[4]等。这些边缘算子虽然方法简单,但是应用的场景比较少。Robert算子利用局部差分算法进行边界寻找,其优点是定位精度高,但缺点是容易丢失部分边缘信息,同时不能有效地抑制图像噪音,因此只能在部分场景使用。Sobel算子和Prewitt算子都是通过对图像进行加权平滑处理,然后做微分运算[5-8],唯一不同的是平滑部分的权值有差异,因此对噪音具有一定的抑制能力,但不能完全排除检测结果中出现的虚假边缘[9]。虽然这2种算子边缘定位效果不错,检测出的边缘却容易出现多像素宽带度现象。高斯-拉普拉斯算子克服了拉普拉斯算子抗噪音能力比较差的缺点,但是它在抑制噪音的同时也将比较尖锐的边缘给平滑掉,从而造成部分边缘信息缺失[8,10]。
在对传统Canny边缘检测算法深入研究的基础上,本文提出一种自适应阈值的Canny边缘检测算法,根据图像本身的特点自动计算Canny算子的高低阈值,能够检测较多的细小边缘,检测效果更好。相对于灰度图像而言,彩色图像具有丰富的数据信息,在RGB颜色空间提取R、G、B这3种原色特征,并与Canny边缘检测后的图像进行加权融合,通过实验验证检测到清晰的图像边缘信息,最后绘制ROC曲线分析其效果。
1 传统Canny边缘检测算法
传统的Canny边缘检测算法基本可以分为以下4步:1)用高斯函数平滑图像;2)用一阶偏导的有限差分公式来计算图像梯度的幅值以及方向;3)对梯度的幅值进行非极大值抑制;4)首先用双阈值算法检测然后再进行边缘连接[11]。
传统的Canny边缘检测算法通过平滑滤波去除噪音的同时,也增加了边缘定位的不确定性,而提高边缘检测算子对边缘敏感性[12]的同时,也提高了对噪音的敏感性,算法的不足之处是其用固定双阈值检测和连接边缘。它的高低阈值的参数被直接定为一个固定值或者直接使用图像平均灰度值作为高阈值参数,从而影响检测效果的真实性。因此需要根据图像本身的情况综合考虑决定合理的阈值参数。
2 改进Canny边缘检测算法
Canny图像分割算法改进的目标是为了找到一个最佳的边缘检测算法,最佳边缘检测算法的含义是:1)精准的边缘检测;2)精准的位置定位精度;3)最小的错误响应。
2.1 自适应阈值

自适应阈值算法如下:
1)图像归一化处理,使用wi(i=0,1,2,…,L-1)表示各个灰度的分量。
2)全局灰度之和wi(k):
(1)
3)累积均值n(k):
(2)
4)全局灰度均值mg:
(3)
5)类间方差η2(k):
(4)
当类间方差η2(k)取得最大值时即可得到最佳阈值ηk,如果最大值ηk不唯一,则取其平均值作为最终的ηk。
2.2 原色特征的边缘提取
原色特征提取的任务是根据三原色分量提取分离边缘特征。但由于彩色成像设备[13-14]具有较宽且相互覆盖的光谱敏感区,加之图像的染色是变化的,所以很难从3个分量中将目标边缘提取分离出来,补偿算法可以有效解决从不同的颜色通道提取不同的目标边缘。补偿算法描述如下:
1)在图像上找到主观视角上看纯红、纯蓝、纯绿的点。
2)考虑到补偿后图像的亮度应保持不变,则对R、G、B的计算为:
R=0.315×R1+0.581×G1+0.116×B1
(5)
G=0.315×R2+0.581×G2+0.116×B2
(6)
B=0.315×R3+0.581×G3+0.116×B3
(7)
3)构造变换矩阵。将所取点的RGB值分别按照如下构造出的彩色补偿前和补偿后的2个矩阵A1和A2。
(8)
4)进行彩色补偿。
(9)
其中,S(x,y)、F(x,y)分别为新、旧图像的像素值,且S(x,y)=C-1×F(x,y)。其中C=A1×A2。
原色特征边缘是在彩色图像的层面上依据红、蓝、绿三原色特征来进行提取的,分别以R、G、B这3个颜色通道的分量值来确定。
红色的原色分量:R=r-0.427(g+b)
(10)
绿色的原色分量:G=g-0.697(r+b)
(11)
蓝色的原色分量:B=b-0.324(r+g)
(12)
其中r、g、b分别为补偿后彩色图像中红、绿、蓝3种颜色的分量值。
在进行图像边缘检测分割提取前,首先需要对图像进行高斯滤波平滑,去掉图像中的噪声以及部分颜色突变,减小不必要的干扰。高斯滤波可能会给边缘检测带来突变[15],但在彩色图像层面上高斯滤波对物体边缘的剧烈突变的影响是有限的。原色特征边缘提取是以像素为单位,范围是以某个像素为中心l×l的邻域,l的取值不应过大或过小,本文取l的值为3,如图1所示。
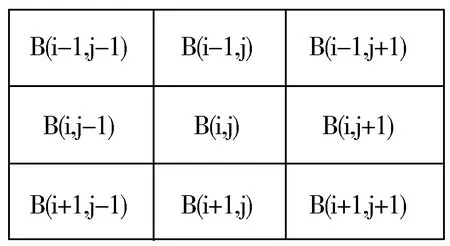
图1 原色特征提取的范围
某点像素最终的值为该点像素点与其邻域内像素原色差值的绝对值之和:
(13)
逐步扫描判断图像,当某个像素的一个或多个原色分量大于某一设定的阈值时,则认为该像素点处的颜色变化较为明显,处在图像中物体的边缘位置。在完成以上的操作过程后,需要对图像进行高斯平滑滤波,将图像物体的边缘轮廓变宽并且平滑,更加有利于突出目标边缘部分,从而使边缘信息更加突出。经过实验可知当阈值为250时,处理图像可以获得精准的边缘信息。
2.3 图像融合
2幅图像合成新的图像,新图像的颜色值是原图像中物体的每个像素的合成值,合成图像的物体既保留了其原来的主要特征,又去除了细小噪音点。运用梯度模拟法[17]首先计算合成图像中物体各像素与图像光照一致时的灰度值,然后根据原图像中物体各像素的特征进行加权融合,从而得到合成图像中物体的边缘特征,也就得到合成图像。
通过原色特征获取的图像转变为灰度图像f1(i,j),与通过改进的自适应阈值边缘检测算法得到的图像f2(i,j)进行加权融合。
图像融合算法公式如下:
F(i,j)=α×f1(i,j)+β×f2(i,j)
(14)
其中ɑ、β为权值。
采用基于灰度值的权值矩阵代替基于图像像素个数的权值矩阵,描述像素之间的关联,并在图像加权计算中增加像素点与其邻域的空间相关信息,以提高算法的抗噪性。在图像加权融合的时候,自适应阈值边缘检测算法和原色特征提取的边缘信息整体性是关键,边缘图像的提取是为了更好地描述物体的整体。通过实验对比多组α和β的值,当α=0.667,β=0.333时,得到的边缘检测的效果是最佳的。
3 实验结果与分析
实验是在Matlab R2016b软件环境下完成的,电脑处理器为Intel(R) Celeron(R)CPU E3400 @2.60 GHz,内存为4 GB,运行的操作系统为Windows 10企业版。经过统计对标准图像[17]中100幅随机图像进行分割来验证本文改进算法的有效性。
先将原图像调整为统一的格式。调整图像的大小,图像的大小直接影响着计算量的大小,太大会使计算变得复杂、效率低。图像的大小是按照其原始比例进行缩放的,图像的灰度值范围归一化到[0,255]。
为了评价改进的Canny边缘检测算法,实验对比了4种边缘检测的算法:Sobel算子边缘检测、传统Canny边缘检测、文献[18]提出的一种基于二维最大熵的SAR图像自适应阈值分割算法以及改进的Canny边缘检测算法。具有代表性的图片与实验结果如图2~图6所示。

图2 荷花、向日葵、Lena
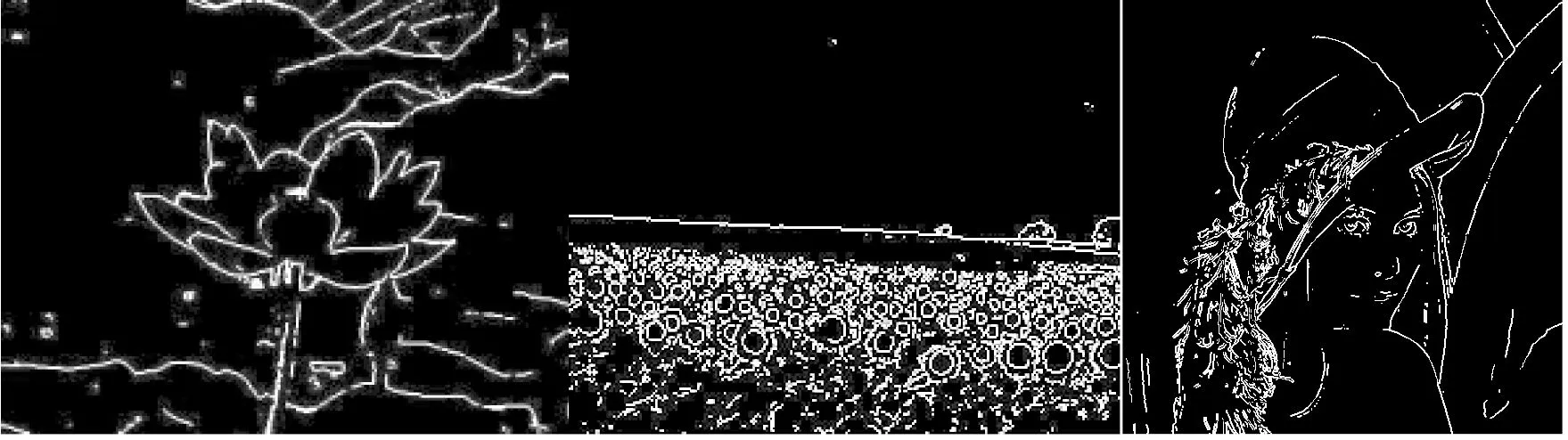
图3 Sobel分割结果

图4 原Canny分割结果

图5 文献[18]中的方法分割结果
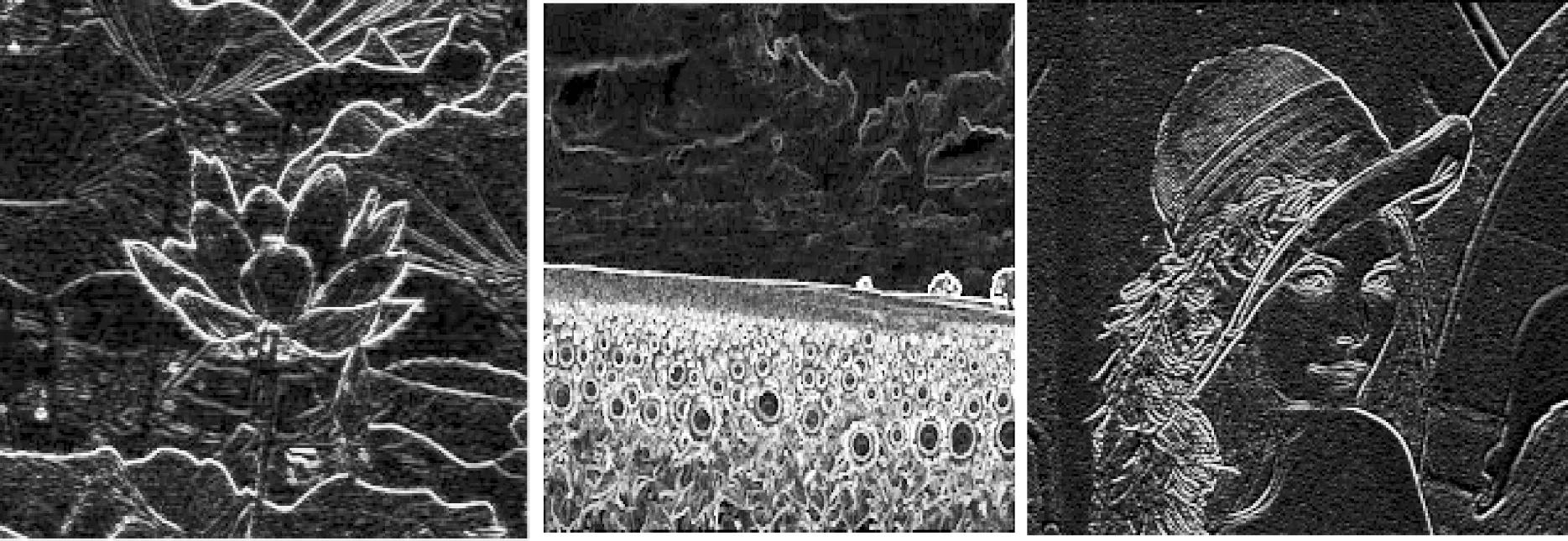
图6 改进算法分割结果
比较图2~图6,可以看到改进算法产生的效果优于其他算法分割的效果。改进后的Canny算法检测的图像边缘信息完整、清晰。其中,Sobel算子边缘信息丢失严重并且其定位精度不高;基于二维最大熵的SAR图像自适应阈值分割算法提取的边缘模糊、边缘信息丢失严重,其优点是能够有效地抑制噪声;改进的Canny算子能够有效地检测物体的边缘,但是噪声较大,影响提取的边缘信息;改进的算法充分利用了原色特征提取法有效地抑制噪声并有效地定位了边缘信息,能够弥补上述边缘检测方法的不足。运行计算一幅边缘检测图像的平均耗时为24.106 s,单从时间的角度看,本文改进的方法并不占优势,结合边缘检测的效果,本文改进方法的表现是优秀的。
ROC (Receiver Operating Characteristic)曲线是一种分析判断和决策性能的定量方法,可以动态、客观地评价一种分类方法的优劣。评价分割结果的本质是一个二分问题,即算法计算的结果是否与统一接受的主观认定相一致。本文计算了4种边缘检测方法的ROC曲线,如图7所示。该曲线是由标准图像[17]数据库中的100幅图像绘制而成的,ROC曲线的横坐标False positive rate代表错误的命中率;纵坐标True positive rate代表正确的肯定率。取其灰度值为阈值,边缘检测图像的False positive rate和True positive rate是正相关的,期望在较小的False positive rate情况下对应较大的True positive rate。

图7 ROC曲线
改进Canny算法的ROC曲线与其他算法的ROC曲线对比,在同一横坐标下处于较高的纵坐标,表明改进的Canny算法在较小的False positive rate时,有较大的True positive rate,因此改进的Canny算法结果优于其他方法。
4 结束语
针对传统Canny算法中阈值不具备自适应性的缺点进行改进,提出了一种改进的Canny边缘检测算法。根据图像的均方差和平均灰度值自动生成阈值参数,并与彩色图像提取的原色特征进行加权融合形成新的边缘图像,同时在图像加权计算中增加像素点与其邻域的空间相关信息,以提高算法的抗噪性,有效地解决了传统图像分割的缺点,在削弱噪音的同时保留更多的图像细节,具有很强的自适应性和较好的实际效果。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2022年6期)2022-07-02
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
天津医科大学学报(2021年1期)2021-01-26
自动化学报(2017年5期)2017-05-14
诗潮(2016年5期)2016-05-14
现代计算机(2016年17期)2016-02-28
中国火炬(2015年11期)2015-07-31
