“一步法”机器人辅助腹腔镜下肾输尿管全长切除术
2018-09-05 06:23:48宋灵敏董永超李卫平王养民
现代泌尿外科杂志 2018年8期
宋灵敏,蓝 天,董永超,李卫平,何 跃,王养民
(中国人民解放军兰州总医院泌尿外科,甘肃兰州 730050)
近年来,机器人辅助腹腔镜手术技术在泌尿外科得到了较快发展和较广泛的应用,此手术平台所具备的高清放大三维操作视野、灵活的腕式活动及无疲劳震颤的机器臂操作等优势,极大提高了手术的精准度,尤其降低了高难度重建技术的要求[1]。
机器人辅助腹腔镜行肾输尿管全长切除术的难点在于需同时进行腹腔及盆腔的手术操作,其常规套管位置在术中分离切除肾脏及上端输尿管后,后续进行下端输尿管、膀胱部分切除及膀胱切口缝合时需要更换机械臂套管位置,重新连接机械臂,增加了手术操作的复杂性、延长的手术时间[2-4]。为了使微创的机器人辅助腹腔镜行肾输尿管全长切除术更加微创、避免术中患者调整体位及机械臂再连接、使手术操作更容易,我们借鉴了ZARGAR等[5]报道的机器人手术套管位置设计,并进行一定的改良,顺利进行了“一步法”机器人辅助腹腔镜下肾输尿管全长切除术的手术操作,使手术易操作,效果满意,现报道如下。
1 资料与方法
1.1临床资料回顾性选择2017年1月至2017年12月在中国人民解放军兰州总医院住院行“一步法”机器人辅助腹腔镜下肾输尿管全长切除术的患者共7例,包括具有明确手术指征且无禁忌证的非远处转移性肾盂癌、输尿管癌及单侧肾输尿管结核患者,对高级别肿瘤患者行区域淋巴结清扫。患者具体资料见表1。
表17例手术患者基本资料
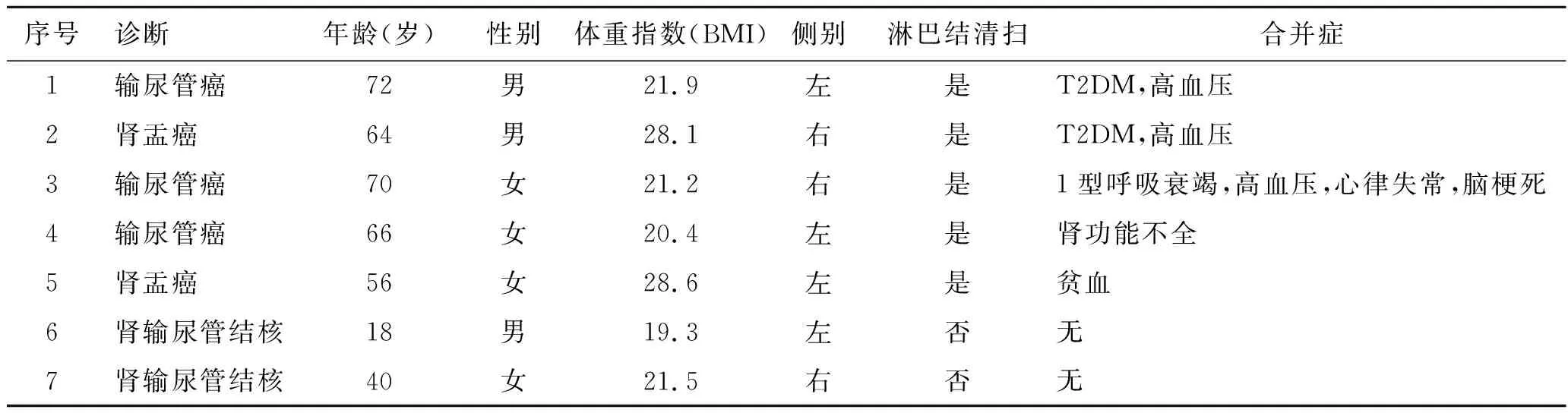
序号诊断年龄(岁)性别体重指数(BMI)侧别淋巴结清扫合并症1输尿管癌72男21.9左是T2DM,高血压2肾盂癌64男28.1右是T2DM,高血压3输尿管癌70女21.2右是1型呼吸衰竭,高血压,心律失常,脑梗死4输尿管癌66女20.4左是肾功能不全5肾盂癌56女28.6左是贫血6肾输尿管结核18男19.3左否无7肾输尿管结核40女21.5右否无
T2DM:2型糖尿病。
1.2麻醉与体位麻醉方式均选择气管内插管全身静脉复合麻醉。手术体位:患者取60°健侧卧位,垫高腰部;患侧上肢下垂置于身体侧方固定,对侧上肢放置在托臂架上固定;整体约15°头低脚高位。机器人套管孔设计(图1A,以右侧病变为例):使镜头孔、操作孔、辅助孔处于一条直线。12 mm镜头孔:患侧腹直肌外缘平第十一肋尖水平;8 mm第一机械臂专用孔:患侧腹直肌外缘肋缘下2 cm;12 mm第一辅助孔位于镜头孔与第一机械臂孔之间中点。第二8 mm机械臂专用孔:患侧腹直肌外缘平髂前上棘水平;5 mm第二辅助孔位于镜头孔与第二机械臂孔之间中点。右侧手术另外在腹正中线剑突下增加5 mm辅助孔用于抬起肝脏。机器人手术台车在患者背侧呈垂直90°角定泊,先使用30°向上镜头直视下放置好所有套管以及器械后,术中全程使用30°向下镜头;机械臂1臂使用单极弯剪、2臂使用Maryland双极钳,在缝合膀胱切口时1臂更换为持针器。
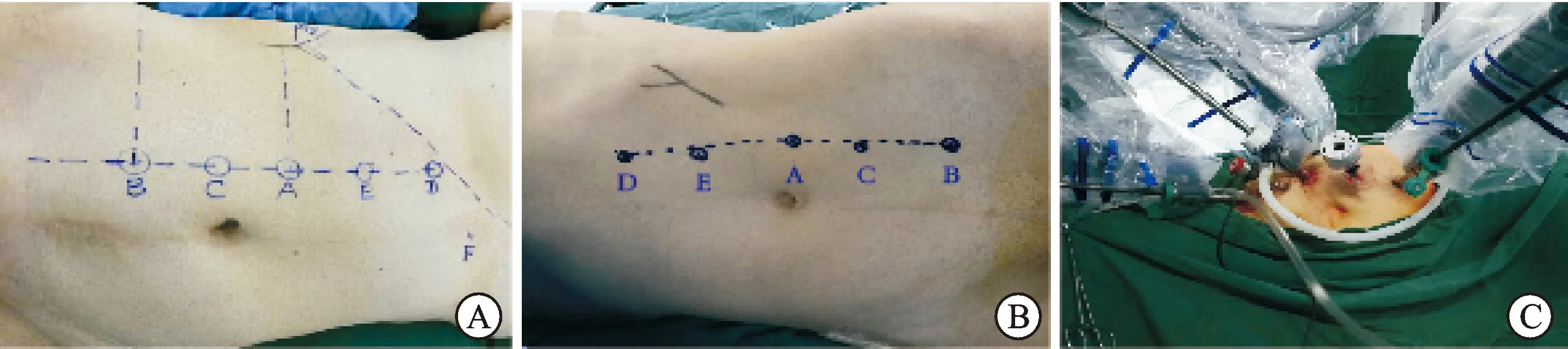
图1“一步法”机器人辅助腹腔镜下肾输尿管全长切除术的套管设计示意图
A:右侧病变示意图;B:左侧病变示意图;C:左侧病变放置套管以及连接机械臂图示。在A和B图中的A点为12 mm镜头孔,位于患侧腹直肌外缘平第十一肋尖水平;B点为8mm第二机械臂专用孔(左侧病变时为第一机械臂专用孔),位于患侧腹直肌外缘平髂前上棘水平;C点为12 mm第一辅助孔,位于镜头孔与第一机械臂孔之间中点;D点为8 mm第一机械臂专用孔(左侧病变时为第二机械臂专用孔),位于患侧腹直肌外缘肋缘下2 cm;E点为5 mm第二辅助孔,位于镜头孔与第二机械臂孔之间中点。右侧手术另外在腹正中线剑突下增加1个5 mm辅助孔(F点)用于抬起肝脏。
1.3手术步骤
1.3.1分离、切除肾脏 首先切开结肠旁沟,充分游离结肠暴露腹膜后间隙;然后切开Gerota’s筋膜,肿瘤患者先游离患侧输尿管,并在肿瘤远侧端使用Hem-o-lok夹闭以减少术中肿瘤播散;沿输尿管向上游离至肾门,充分游离肾脏动静脉后,使用Hem-o-lok分别夹闭肾脏动静脉后离断,近侧端保留两个Hem-o-lok;采用钝性联合锐性方法逐步将患侧肾脏自肾窝完全游离,保留同侧肾上腺[3-5]。
1.3.2膀胱袖套状切除 提起已经游离的上段输尿管,沿其逐渐向远侧端游离至输尿管膀胱交界部位,尽量多切除输尿管周围组织;向近侧端牵拉输尿管,在膀胱裂隙处切开膀胱逼尿肌,至观察到膀胱黏膜向外膨出;在膨出的膀胱黏膜内侧切开1个小口,采用3-0可吸收线全层缝合膀胱切口1针,先不打结;环形切开该部位膨出的膀胱黏膜至全段输尿管及膀胱袖套状切除;3-0可吸收线连续缝合膀胱切口;自尿管内灌注200 mL生理盐水观察膀胱切口无外漏;将切除组织放入自制标本带内并密闭[3,5-6]。
1.3.3淋巴结清扫 对于高级别肾盂癌或腹段输尿管癌,同时行腹主动脉旁(左侧肿瘤)或下腔静脉旁(右侧肿瘤)淋巴结清扫,从肾门平面至髂血管分叉处;对于盆段输尿管癌,行病变同侧盆腔淋巴结清扫,包括髂总、髂外、髂内及闭孔淋巴结;若术前影像学或术中明确发现肿瘤周围侵犯,则需行更广泛的盆腔及腹膜后淋巴结清扫[5-7]。清扫淋巴结后放入自制小标本带中并采用钛夹密闭。
1.3.4取出标本 取出标本的切口选择连接机器人观察镜孔和第一辅助孔,根据切除标本大小适当延长,取出标本时避免严重挤压标本,以利于术后病理诊断及分期。机器人一臂孔放置盆腔引流管,机器人二臂孔放置腹腔引流管。
1.4统计学分析描述分析所有行“一步法”机器人辅助腹腔镜下肾输尿管全长切除术患者的病例资料,包括年龄、性别、侧别、体重指数(body mass index,BMI)、手术时间、术中估计失血量、输血情况、术中及术后并发症、淋巴结清扫情况、术后病理以及患者的合并症情况。
2 结 果
2.1手术结果7例患者均成功完成手术治疗,无中转开放,手术成功率100%,其手术时间、术中估计失血量以及术中术后并发症情况详见表2。1例患者因肾盂肿瘤侵犯肾实质以及肾门处脂肪组织,在处理肾门时出血量较大,术中估计失血量约500 mL,该患者术前诊断贫血,故术中予以输血治疗(悬浮红细胞1.5 u,血浆200 mL),该患者术后第2天出现麻痹性肠梗阻,予以胃肠减压、禁食以及静脉营养支持等处理3 d后症状缓解,顺利出院;诊断为恶性肿瘤的患者术中均行区域淋巴结清扫术,其中1例患者术后出现淋巴漏,每日引流量最多约300 mL,保持引流通畅、密切观察至术后第7天引流消失,症状缓解,顺利拔出引流管后出院,随访无特殊;除上述2例患者外,其余患者均无术中术后并发症,均顺利痊愈出院,定期随访。
表27例患者手术结果、术中术后并发症及术后病理
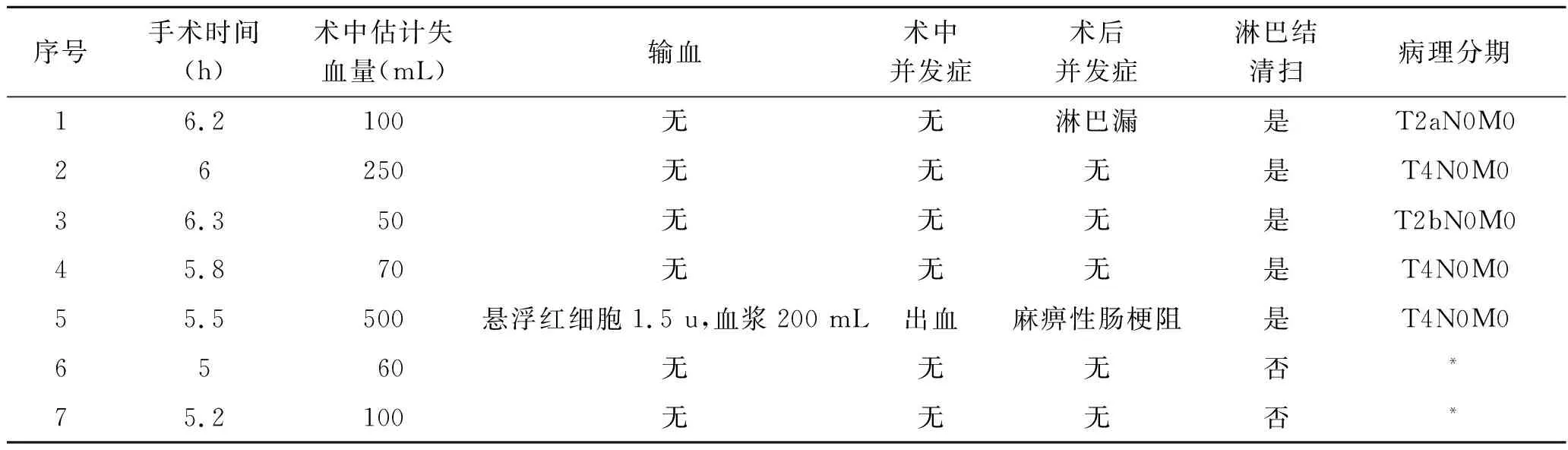
序号手术时间(h)术中估计失血量(mL)输血术中并发症术后并发症淋巴结清扫病理分期16.2100无无淋巴漏是T2aN0M026250无无无是T4N0M036.350无无无是T2bN0M045.870无无无是T4N0M055.5500悬浮红细胞1.5 u,血浆200 mL出血麻痹性肠梗阻是T4N0M06560无无无否*75.2100无无无否*
*病理诊断为肾脏及输尿管肉芽肿性炎。
2.2病理2例肾盂癌术后病理均诊断为肾盂高级别浸润性尿路上皮癌,输尿管切缘阴性,区域淋巴结阴性;1例癌组织侵及肾脏髓质,1例癌组织侵及肾脏实质及肾盂壁外脂肪组织,分期均为T4N0M0。3例输尿管癌术后病理均为输尿管高级别浸润性尿路上皮癌,输尿管残端及输尿管周围组织切缘阴性,区域淋巴结阴性;1例癌组织侵及输尿管浅肌层(T2aN0M0)、1例癌组织侵及输尿管深肌层(T2bN0M0)、另1例伴癌组织广泛鳞状分化并侵透输尿管壁肌肉组织至外膜纤维脂肪组织中(T4N0M0)。2例单侧肾脏输尿管结核的患者术后病理诊断为肾脏及输尿管肉芽肿性炎,考虑结核。
2.3随访该7例患者术后平均随访时间为6(0~11)月。2例结核患者术后复查无特殊异常;对该5例肿瘤患者,均建议行术后辅助吉西他滨联合顺铂(Gemcitabine combined with cisplatin,GC)方案全身化疗,但只有3例T4期患者采纳,其中2例肾盂癌患者已完成4个周期,输尿管癌患者正处于第2周期化疗,均耐受良好;另2例T2期输尿管癌患者不能接受全身化疗,予以采用吡柔比星行膀胱灌注治疗;至撰写本文时,该部分患者均未见明确肿瘤复发、进展或转移。2例单侧肾输尿管结核患者随访至今无特殊。
3 讨 论
目前,机器人辅助腹腔镜手术在我国泌尿外科手术领域得到引人瞩目的发展,随着手术技术的逐渐成熟、开展范围的逐渐拓广,该手术方式已广泛应用于泌尿外科手术领域,基本上涵盖了所有泌尿外科常规腹腔镜手术范围,包括几乎所有腹腔内泌尿系统良恶性肿瘤的部分切除术、根治性切除术、淋巴结清扫术、尿流改道术以及腹腔内泌尿系统先天畸形的成型手术等[2,8]。相对于常规腹腔镜手术,机器人辅助腹腔镜手术的优势很明显,包括在手术操作方面的三维视野、放大的手术区域、灵巧的机械手臂等优势,以及在手术效果如更少的出血量、手术时间更短、术后并发症较少、住院时间短等,唯其费用目前相对更高[1,9-11]。
肾及全段输尿管切除术需要从肾脏上极至盆腔深部做膀胱袖套状切除,手术范围较大,常规机器人辅助腹腔镜套管位置的设计存在解剖入路欠佳和机器人手术器械之间碰撞的困难,同时存在机器人单一定位处理难度较大的问题,故需要采用双定位技术,术中调整套管位置或制作杂交套管的方法,并需术中调整机器人的定泊:行肾脏切除时机器人系统从手术床头端以45°角定泊,而行盆腔内操作时需更换至髂嵴水平以45°角从手术床脚端重新定泊,增加了操作的复杂性[6,12]。
为使机器人辅助腹腔镜行肾输尿管全长切除术发挥更加微创的优势,我们结合既往学者报道[5]和我科经验,顺利进行了“一步法”机器人辅助腹腔镜下肾输尿管全长切除术的手术操作,避免了术中患者调整体位、机械臂再连接及机器人的重新定泊,同时兼顾了肾脏、全段输尿管以及部分膀胱的整块切除以及膀胱切口的吻合,使操作更容易,治疗效果满意。
术中采用取60°健侧卧位、整体约15°头低脚高的手术体位,结合了上尿路及下尿路手术的体位[2]。健侧60°卧位利于术中完全游离结肠并借助其重力作用使游离的结肠向中线移动,并充分暴露腹膜后间隙,使游离肾脏及腹段输尿管操作更容易;15°头低脚高位可使盆腔内肠道向头侧移动,利于游离盆段输尿管及膀胱侧壁,使行膀胱袖套状切除及缝合膀胱切口时盆腔空间更大、不受阻碍;在肥胖患者手术时,肠道占据盆腔、向头侧移动不显著时,需助手辅助牵拉;该体位可避免术中重新调整体位,特别在盆腔内操作时。
套管孔设计在患侧腹直肌旁一条线上,机器人操作件使用30°向下镜头、1臂使用单极弯剪(缝合时换为持针器)、2臂使用Maryland双极钳,并2个辅助孔(右侧加用剑突下辅助孔抬肝),机器人手术台车在患者背侧呈垂直90°角定泊。在对体重指数较高的患者行手术时,可将辅助孔向腹正中适当靠近,以减少术中辅助孔与机器人操作臂的碰撞。该套管孔设计方法可术中同时兼顾上尿路及下尿路,在不重新调整套管孔位置及机器人重新定泊的情况下,能顺利进行患侧肾脏、全段输尿管以及输尿管膀胱交接部分的整块切除,并对膀胱切口进行缝合。肾脏及腹段输尿管的切除与常规肾癌根治术手术步骤相仿,不过需先游离输尿管,并在肿瘤远侧端使用Hem-o-lok夹闭以减少术中肿瘤播散;肾门血管采用常规Hem-o-lok控制[4]。在行输尿管膀胱交界处行膀胱袖套状切除时,膀胱黏膜内侧切开一小口后先采用3-0可吸收线全层缝合膀胱切口一针避免膀胱黏膜缩回以及作为牵拉线便于切除和后续的缝合;因机械臂的灵活性,机器人辅助腹腔镜手术在该部位切除及缝合时优势较普通腹腔镜显著[3,5,8],且操作时间显著缩短,缝合效果更好;术中采用膀胱内灌注的方法判断缝合效果;所有患者术后均未出现尿外渗,术后7 d顺利拔出尿管,随访排尿与术前相仿。不仅如此,该套管设计方案也有利于我们在淋巴结清扫术时能同时兼顾清扫腹腔血管旁以及盆腔淋巴结而不增加手术难度。
采用“一步法”机器人辅助腹腔镜下肾输尿管全长切除术的方法进行了7例手术,其中肾盂尿路上皮癌2例、输尿管尿路上皮癌3例、单侧肾输尿管结核2例,基本涵盖了所有具有行肾输尿管全长切除术的疾病;对于5例尿路上皮癌的患者,3例分期为T4期,局部侵犯粘连显著,手术难度较大;同时术前诊断考虑为浸润性肿瘤,术中均行区域淋巴结清扫术。纳入的7例患者均成功完成手术治疗,无中转开放,其中2例出现轻微并发症,所有患者均顺利康复出院,无严重术中术后并发症,目前随访无特殊,提示手术效果较好。因目前随访时间尚不够,尚无法判断其远期预后。
“一步法”机器人辅助腹腔镜下肾输尿管全长切除术,套管位置可以保证机器人各机械臂间互不干扰,手术操作便捷;术中避免调整患者体位和机器人系统重新定泊,手术过程顺畅;不需要增加套管而完成肾输尿管全长切除手术,切口更为微创;该套管布局可以充分发挥机器人手术的的优势;可以常规用于肾输尿管全长切除术操作;手术安全可靠,可推广应用。
猜你喜欢
中老年保健(2022年3期)2022-08-24 02:58:10
云南化工(2021年10期)2021-12-21 07:33:34
现代临床医学(2021年6期)2021-11-20 06:34:42
海洋石油(2021年3期)2021-11-05 07:43:02
建材发展导向(2021年7期)2021-07-16 07:09:00
中国生殖健康(2019年10期)2019-01-07 01:21:22
特别健康(2018年9期)2018-09-26 05:45:46
中国医药指南(2017年3期)2017-11-13 02:57:19
中国继续医学教育(2015年4期)2016-01-07 07:38:09
凿岩机械气动工具(2015年3期)2015-11-11 07:32:53