多关节机器人事件驱动神经网络滑模控制
2018-09-04 16:36:38
制造业自动化 2018年8期
(上海工程技术大学 机械工程学院,上海 201620)
0 引言
机器人系统是一种复杂的多输入多输出非线性系统,其动力学模型具有强耦合性、时变不确定性,其控制非常复杂[1]。滑模控制本质上是一类特殊的非线性控制,因具有强鲁棒性而 成为一种有效的控制方法[2,3]。径向基函数神经网络(RBFNN)结构简单、收敛速度快,可以轻松逼近非线性函数,在控制中具有明显的优势[4,5]。RBF神经网络滑模控制兼具了两者优点,得到广泛应用[6]。事件驱动控制是一种仅在特定的事件或条件符合时进行控制优化的控制方式[7]。文献[8]首次提出了一种基于事件驱动的非线性系统状态反馈控制方式,其性能与连续的状态反馈控制方式相近,其稳定性和鲁棒性也得到了验证[9,10]。文献[11]提出了一种基于事件驱动的输出反馈控制策略,给出了相邻事件最小时间间隔作为稳定条件,并用线性矩阵不等式分析其稳定性。文献[12]结合事件驱动控制方法和预测控制方法,采用时间最小准则和控制次数最小准则,并推导出闭环渐进稳定条件。文献[13, 14]针对事件驱动的轨迹跟踪控制进行了研究,有效降低了通信量。
本文在上述文献的基础上,提出了一种基于事件驱动的机器人轨迹RBF神经网络滑模控制方法。该方法通过设计的事件驱动条件将RBF神经网络滑模控制器进行拓展,使控制力矩只在设定的条件满足时进行更新。该控制方法保证跟踪误差最终一致有界和不存在Zeno行为,并在保证系统稳定性和性能的前提下,大幅度减少通讯频率和执行频率,降低能耗,提高系统寿命。
1 问题描述
多关节机器人的动力学模型为[15]:

机器人的特性如下所示:
2 事件驱动的神经网络滑模控制器设计
设计滑模面为:

设计滑模控制器为:

选取Lyapunov函数为:

对其求导,得到:

设神经网络的实际输出为:
RBF神经网络的权值调整自适应律设计为:
设计RBF神经网络滑模控制器为:

选取Lyapunov函数:

对其求导,可得:

在保证良好跟踪效果的基础上,设计一个驱动条件来决定控制力矩的更新。由于控制力矩仅受跟踪误差和期望轨迹的影响,故设:

事件驱动控制器将基于以下假设进行设计:

假设3:存在κ∞函数满足:
设ti{i=0,1,2,…}为事件驱动控制器的时间序列,则有:

在事件驱动过程中当前状态向量与上一次事件驱动发生时的状态向量存在测量误差,具有以下形式:


故事件驱动控制器可表示为:


由于设计的RBF神经网络滑模控制器在紧集上满足Lipschitz条件,令紧集为:

式中,d=d1+d2+d3。
给定控制力矩的Lipschitz常数为L,则有:

将式(16)代入式(14)得:


定理1:考虑设计的机器人事件驱动控制系统(6)和(18),在假设条件都满足情况下,该系统可以保证跟踪误差向量是最终一致有界的。
证明:
由Lyapunov函数L1的定义,L1可改写为:
由于:
定义:
根据初始更新时刻的定义,当t∈[0, t0)时,由Lyapunov函数的定义式和假设3,可得:
假设当t∈[t0, ti),{i=0, 1, 2, …}时,下面需要证明该结论当t∈[t0, ti+1)时也成立。
由于当t∈[tk, tk+1),k∈{0, 1, 2, …, i},时,因此,当t∈[t0, ti+1)时,
考虑式(17)和由事件驱动条件得到的时间序列,当t∈[t0, ti+1)时,并可得到:

由跟踪误差向量的连续性和式(19),可得:

因此,当t∈[t0, ti),i∈{0, 1, 2, …}时,式(20)也成立。
定义集合:


定理2:考虑设计的机器人事件驱动控制系统(6)和(18),在假设条件都满足情况下,该系统可以保证不存在Zeno行为。
证明:

定义P1,k为该式右边的Lipschitz常数,可得:

当t∈[t0, ti)时,故由式(15)和式(16)得:

其中,P2≥max{1, L, P1}>0。
考虑测量误差范数的导数,有:

再由该式和假设1得:
式中,P3≥P2+1。
故:


由于P3和L是一定的,更新时间间隔T的下界大于0。因此,可得到结论:在机器人轨迹事件驱动控制过程中不存在Zeno行为。
3 仿真验证
为验证本文所设计的机器人轨迹事件驱动控制器的有效性, 以一个二关节机器人为例进行仿真验证。参数设置如下所示:
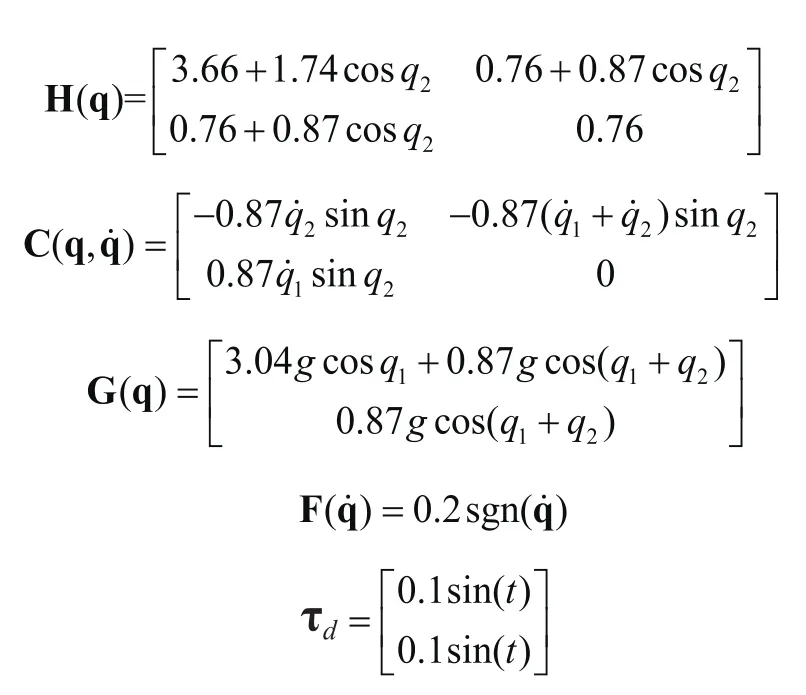
关节期望轨迹:qd1=qd2=0.2sin(3t);
关节初始状态:q(0)=[0.2-0.2]T,q˙((0)=[0.6-0.6]T。
控制参数:

该仿真试验的结果如图1~图4所示。
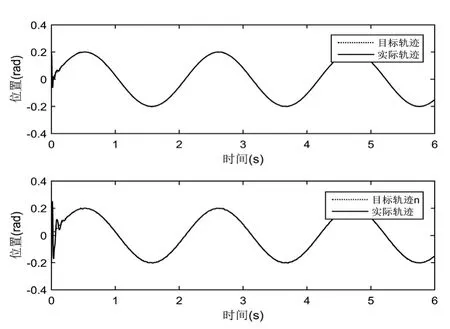
图1 关节位置
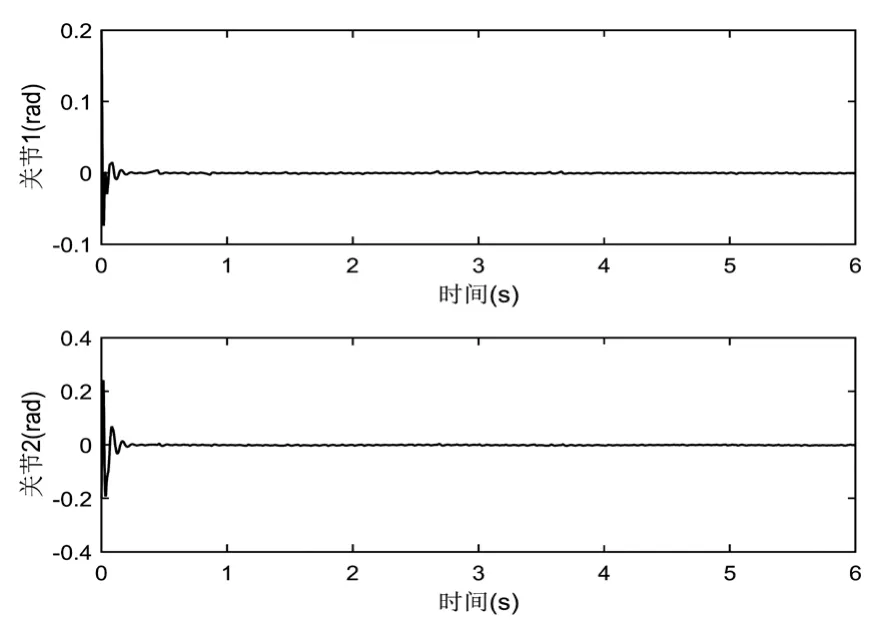
图2 跟踪误差
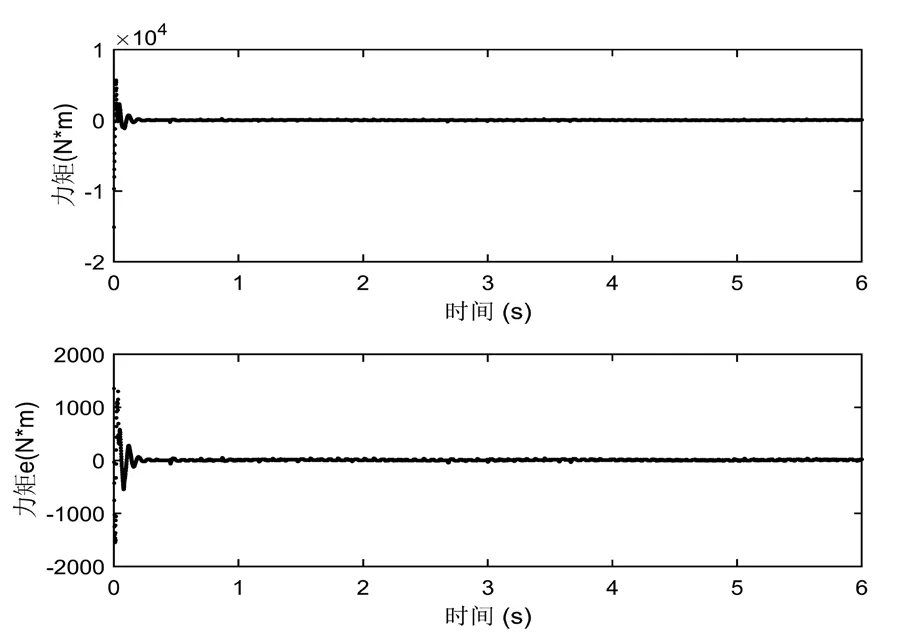
图3 控制力矩
图1中实线为当前关节轨迹,虚线为期望轨迹,图2为跟踪误差,并由图1和图2可知,该控制方法能够实现轨迹跟踪的目标。通过查看计算数据可知,稳态误差在10-4rad的数量级以内,因此具有非常小的跟踪误差;而调整时间在0.5s内,能跟踪上目标轨迹的速度非常快,故具备良好的鲁棒性。图3为控制力矩的变换情况,事件驱动控制器的控制力矩并不是连续更新,但能够明显削弱抖振。图4为更新时间间隔T=ti+1-ti,由图可知最小更新时间间隔大于0,故可验证在事件驱动过程中不存在Zeno行为。从计算数据可知,该事件驱动的控制方法的实行次数为2260,与时间连续控制方法的6000次相比,能节省大约60%的执行和通信次数,从而减少能耗、提高系统寿命,并可验证:该事件驱动控制器可以保证跟踪误差向量是最终一致有界的。因此,该事件驱动控制方法在保证良好控制精度和极度削弱抖振的同时大幅度减少执行频率和更新频率,从而有效证明了本文提出的控制方法的控制性能。
4 结论
针对多关节机器人的轨迹跟踪控制问题,提出了一种事件驱动的神经网络滑模控制方法。
本文在滑模控制器的基础上,设计RBF神经网络对f进行逼近,实现多关节机器人的轨迹控制,并提出了一种事件驱动条件来决定控制力矩的更新,确保系统中跟踪误差是最终一致有界的和不存在Zeno行为。该方法一方面能保证系统稳定,具有良好的控制精度和鲁棒性,另一方面又大幅度削弱了更新频率,降低能耗,提高系统寿命。仿真实验也证明了提出的控制策略的有效性,该控制策略并适用于其他类似的多输入多输出的控制系统。
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51