轴孔装配工业机器人RBF自适应鲁棒控制
2018-09-04 16:36:34
制造业自动化 2018年8期
(河南理工大学 电气工程与自动化学院,焦作 454000)
0 引言
工业机器人柔顺装配是工业生产中的重要环节,也是不可或缺的环节。在实际生产应用中具有重要的意义。但是在机器人轴孔装配中可能会出现卡阻现象,从而造成对机械手末端或者插销零部件的损坏,严重时会造成生产事故。因此,如何避免在轴孔装配过程中出现卡阻现象,成为了很多学者研究的问题。文献[1]提出了轴孔装配过程中的几何和力学分析,得出轴孔装配过程中几个关键阶段的力学分析。文献[2]和文献[3]专门分析了柔顺装配中卡阻和楔紧的力学研究,分析了可能影响卡阻和楔紧的因素,但是并未提出具体的改善方法。文献[4]分析了间隙、倾角等各种因素对装配力的影响。文献[5]提出了基于模糊控制的机器人的柔顺装配的研究,运用模糊控制方法控制位移调整量和旋转角度调整量来实现柔顺插孔作业。文献[6]提出了工业机器人的机械手的轨迹跟踪控制,通过自适应滑模控制的不确定性和扰动。
本文中先是对插孔作业中的卡阻现象进行受力分析,找出避免卡阻现象的因素,运用RBF神经网络鲁棒自适应的方法设计出一种力/位混合控制器,实现对机械手末端位置的跟踪以及末端所受外力的实时跟踪。
1 卡阻现象的受力分析
在轴孔装配的过程中,理想的状态即为水平方向受力为零,而只在竖直方向受力,插销与插孔的两侧壁均无摩擦力,插销即可安全出入插孔内。
插孔作业首先要考虑的就是插销能够进入孔内,然后才能考虑下面的受力分析,插销无法入孔有两种可能,一是插孔定位错误,插销没有找到插孔的位置,二是插销所处的姿态使得插销无法入孔。由于现在几乎在插销入孔时都有视觉进行辅助,因此,找不到孔的位置这种情况这里不做考虑,下面分析第二种情况。
一点式接触阶段需要考虑插销入孔的问题,如果当插销的一侧已经入孔,而另一侧底角未进入孔内或者刚好卡在孔的边缘,此时,插销不能进入孔中。如图1所示为插销不能入孔的临界情况。

图1 插销不能入孔的临界情况
其中R为插孔的半径,r为插销的半径,l表示插销进入空的深度。
根据图1建立三角关系式:

解得:

2 装配机器人控制方案设计
当插销进入插孔后,由于轴孔定位时的误差,插销的中心轴线与插孔的中心轴线出现一定的夹角,从而造成卡阻现象。
2.1 去卡阻控制方案
当夹持插销的机械手处于某一状态时,插销与插孔的最大静摩擦力小于于插销在竖直方向的受力时,此时插销可以继续插入。插销与插孔的最大静摩擦力大于插销在竖直方向的受力时,此时插销将会处于卡阻状态。由于最大静摩擦力fmax的大小与水平方向上插销对插孔的压力有关,因此,它与插销所处的姿态有关,即和偏转角相关。当出现卡阻状态时,可以通过调整机械手位姿,从而调整插销的位姿,来保证插销顺利的插入孔内。
因此该插销去卡阻的工程问题可以转化成机械手的轨迹跟踪问题,把从卡阻点作为初始点,平移旋转后的点作为结束点,规划出一条机械手的运动轨迹,根据机械手的逆运动学求解,即可以得到各个关节角的运动轨迹。因此只需要设计出一个控制器,使得机械手可以沿着期望轨迹运动,即可以实现插销入孔作业中的去卡阻问题。
2.2 装配机器人鲁棒自适应控制
实际应用中,要求工业机器人的末端效应器以一定的约束力保持在某一物体表面上。机械手与典型的刚性环境接触时,存在两种约束力:一种是末端效应器与约束面接触点产生的法向接触力,由于它不产生虚功,所以又称为无功约束力;另一种是末端效应器与约束面产生的摩擦力,由于它对外做功,所以称为有功约束力。当机械手在一个有摩擦的刚体表面上滑动时,要同时考虑有功和无功两种约束力。为简化问题的分析,本节假设机械手的接触面是刚性、无摩擦的,即忽略有功约束力,仅研究机械手与刚性接触面之间的法向完整约束力[7]。n自由度机械手完整的动力学模型可表示为:

为设计鲁棒稳定的控制器,我们需要做一些合理的假设:
假设1:末端机械手的参数矩阵都是有界的;
假设2:期望的系统广义坐标向量qd连续有界,并具有连续可微的二阶导数;
假设3:期望的约束力τf有界。
考虑系统存在的参数不确定性和外界扰动,设计一个RBF神经网络鲁棒自适应控制器,使系统的所有参数一致有界,系统的广义坐标和速度渐进跟踪期望的轨迹与速度,约束力趋近期望的有限值。
RBF网络算法为:

其中,x是输入向量;y是神经网络输出;h=[h1,h2,…,hn]T为高斯函数的输出;w为神经网络的权值。ci和bi为高斯函数的参数。
给定一个很小的正数ε和一个连续的函数则存在一个理想的权值向量w*,使得RBF逼近且满足:

最佳逼近权值。
定义逼近误差为:

假定逼近误差ξ有界的,即:

则:

设状态向量q的期望向量为qd。系统的跟踪误差为e=q=qd,定义系统的滤波误差向量分别为及:

和控制器。

自适应律:

定理:假设机械手的所有参数都是不确定的,外界扰动有界,那么控制器式(11)和自适应律式(12)保证下列结论成立:
跟踪误差e以及其微分e˙渐进收敛于0,广义坐标向量q以及其微分渐进收敛于期望轨迹qd和
证明:定义Lyapunov函数:

对等式两边求微分得:





所以,s∈L2。由于所以,由假设2,假设3和qr的定义可以得出,都是有界的。因此,式(10)的右边有界,则进而得出,由Barbalat定理可得:

3 位姿跟踪及约束力跟踪仿真
选二关节机器人系统,其动力学模型如式(3)所示。
其中:

系统的初始状态为[1.4 0 1.6 0],两个关节的角度指令分别是qd1=1.4+0.5cost,qd2=1.6+0.5cost;
控制参数取K=diag{20,20},Λ=diag{5,5},ε=0.2,η=10。

bi=0.2,理想约束力τf=5sint。
仿真结果如图2~图4所示。
由图2和图3可以看出,机械手位置轨迹跟踪效果良好,能够实时的控制机械手的关节角度,从而来调整插销的位姿。由图4可以看出,该控制器实现了对力信息的实时跟踪,从而保证机械手对插销的作用力在未达到插销与插孔的最大静摩擦力之前,可以适当的调整插销的位姿,从而避免出现卡阻现象。

图2 关节1的角度跟踪及跟踪误差

图3 关节2的角度跟踪及跟踪误差
4 结束语
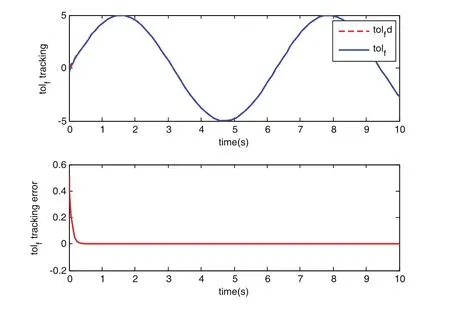
图4 外界作用力跟踪及跟踪误差
本篇文章详细的分析了无倒角轴孔作业的整个流程,设计出一种控制方法,可以使得末端机械手通过自身运动,使得装配过程中避免卡阻现象,并通过仿真证明这种控制方法。由于本次仿真只是运用最基本的二连杆模型进行仿真,然而,在实际的生产应用中经常会出现多个机械手进行配合同时作业,以及在工作空间中的环境约束等,因此,该控制器仍然有待进一步提高。
猜你喜欢
冶金设备(2021年2期)2021-07-21 08:44:28
铁道通信信号(2020年6期)2020-09-21 09:23:14
铁道通信信号(2019年4期)2019-10-10 03:42:40
中国科技博览(2017年40期)2017-12-13 22:45:32
哈尔滨工程大学学报(2016年11期)2016-12-12 10:47:41
山东工业技术(2016年15期)2016-12-01 05:31:44
工会信息(2016年4期)2016-04-16 02:39:07
法律史评论(2015年0期)2015-07-31 18:56:51
锻压装备与制造技术(2015年2期)2015-06-26 09:00:30
衡阳师范学院学报(2015年2期)2015-02-26 03:25:05