
自动驾驶路径跟踪控制技术研究趋势
2018-09-04 09:37黄海洋刘秋铮
汽车文摘 2018年9期
黄海洋 刘秋铮
(中国第一汽车集团有限公司 智能网联开发院 智能驾驶研究所,长春 130000)
主题词:路径跟踪 控制 自动驾驶 网联汽车 编队行驶
1 前言
近年来随着传感器、计算平台、线控执行等技术的快速发展,自动驾驶车辆逐渐成为汽车行业的研究热点。自动驾驶车辆软件通常可分为三层:环境感知层、规划决策层、执行控制层。路径跟踪控制技术作为执行控制层的核心内容,主要通过结合控制理论及车辆动力学特性,控制方向盘转角使得车辆沿着规划决策层所规划的路径行驶,其控制的精度、平滑程度等影响着自动驾驶车辆的行驶安全性、平顺性等诸多性能,一直占据着车辆控制领域的研究热点。
常规工况下的路径跟踪控制技术已有了较为成熟的应用,按照使用模型不同可分为基于几何/运动学模型的方法和基于动力学模型的方法[1],其中基于几何/运动学模型的方法,通常将车辆简化为四轮机器人刚性结构,由于相对简单计算量小,已有较多实车应用,如在DAPRA挑战赛中首次使用的Stanly方法,名古屋大学的自动驾驶开源项目Autoware中使用的纯跟踪方法等。基于动力学模型的方法考虑车辆轮胎侧偏等动力学特性,常结合线性二次型调节器、模型预测控制等最优控制理论,实现预瞄窗口内综合控制偏差及控制调节量代价最小的目标,如百度阿波罗的自动驾驶开源项目中所使用的横向控制器即为LQR和MPC。
此类路径跟踪控制技术已经能够基本满足常规自动驾驶车辆在常规工况(如附着良好、转弯平缓)的使用需求,通过2018世界先进车辆控制大会的相关路径跟踪控制研究报告,我们不难发现车辆控制领域近年来的研究热点,已经逐渐从常规简单工况的路径跟踪向考虑更多影响因素、覆盖场景更为全面的路径跟踪控制偏移,包括极限工况下的路径跟踪控制、网联车辆协同路径跟踪控制、特种车辆的路径跟踪控制等,研究覆盖更为全面,使得未来智能车辆的应用场景更为丰富。
2 极限工况下的路径跟踪控制
极限工况主要指轮胎力达到地面附着极限的工况。比较典型的研究方向为通过控制后轮先达到轮胎力饱和,使得车辆后轴侧滑并稳定沿目标轨迹形式的漂移路径跟踪控制,这类研究旨在实现后轴侧滑情况下稳定控制车辆沿既定轨迹行驶,提高未来自动驾驶车辆特殊极限工况下的安全性。
韩国首尔大学的Eunhyek Joa等人[2],通过将车辆总体横摆角速度分解为自身转动和绕瞬时旋转中心的转动,设计上层控制器计算目标前后轴的侧向力,然后由下层控制器通过控制方向盘转角实现前轴侧向力,通过驱动力控制后轴滑移率,改变纵向力大小从而间接控制饱和的后轴侧向力,实现漂移路径跟踪控制。

图1 漂移目标路径[3]
斯坦福大学的Jonathan等人[3]通过单轨车辆动力学模型构建了路径跟踪控制器,通过控制车辆速度矢量的旋转在曲线坐标系下跟踪横向偏差,控制车辆相对于速度矢量的横摆速度来调节车辆侧偏,然后利用非线性逆模型及轮速闭环控制得出最终的方向盘转角和驱动力矩控制量。实车试验结果显示在如图1所示的轨迹,转弯半径约7 m和20 m,车速范围在25-45 km/h,侧偏角最大达到40°的情况下,其依然可达到良好的横向偏差和侧偏角跟踪精度。
对于传统车辆而言通常具有不足转向特性,因此在极限状况下多数情况为前轴先于后轴达到轮胎极限,由此通常会导致通过方向盘的转向控制无法有效控制车辆跟随期望路径。针对这种极限情况,Victor等人[4]利用最优控制理论,通过在控制回路中的比例反馈实现极限轮胎力控制,具有较小的硬件计算资源消耗。
而Vincent等人[5]人提出了一种新型控制方法,其通过控制纵向速度来进行路径跟踪,而转向控制用来使前轮在转弯过程中接近最大侧偏角,通过实验对比发现,在路面附着估计不准确的情况下,该方法相对传统通过转向控制跟踪路径的方式,更能够充分利用轮胎附着力并且有效跟踪路径。
Vivian等人[6]则针对模型预测控制(MPC)中采用的轮胎模型通常难以实现在全轮胎力范围内一致的跟踪性能问题,提出了一种新型的刷子轮胎模型线性化方法,可以有效应对从车辆静止起步到极限转弯的全部应用场景,基于MPC控制框架的Golf GTI实车试验显示,在车速过高过弯的工况下由于轮胎纵向力过大,导致可用的转向横向力减少的情况下,控制器通过轮胎模型可准确预测到侧向力的饱和状态,从而避免了饱和状态下因过大的方向盘转角控制量,反而使得车辆转向不足特性更加严重的现象。
由此可见不管是利用后轴侧滑,还是基于控制纵向速度减小车辆转向不足的方法跟踪目标路径,均较为依赖对于轮胎力的建模与控制,是保证极限应用场景下自动驾驶安全性的基础,此类研究对于自动驾驶技术从L4限定场景升级为L5全场景的自动驾驶具有重要的意义。
3 网联车辆协同路径跟踪控制
网联车辆协同控制的目标在于提升整体安全性、通行效率等优点,其研究内容主要集中在两方面,针对编队行驶车辆的路径跟踪控制和网联自动驾驶车辆的协同换道控制。
高速公路的货车自动编队行驶可有效减少货运司机人力成本,提升燃油经济性,增加道路通行效率。队列行驶的货车由于后车的目标轨迹是由前车的实际行驶轨迹决定,如果在横向控制中出现后车横向超出前车行驶轨迹的情况,则很有可能引发后车陆续横向更加发散的驶出车道,危及行驶安全性。Omar等人[7]针对这种稳定性问题进行了横向控制研究,其在保证路径跟踪的总体控制目标的同时,将横向队列稳定性建模为控制目标,设计了H∞控制器,并通过仿真及实车实验验证了其变道工况下的横向队列稳定性。
多车辆同时变道是较为常见且容易发生事故的驾驶场景,而随着车载网联通信技术的发展,多车协同自动控制将有效提高驾驶安全性和通行效率。Ji⁃ang等人[8]设计了两层控制器,上层控制器考虑车辆动力学特性及多车辆换道轨迹,提出“最大风险位置”的概念,利用博弈论建模计算调整本车的期望横向、纵向加速度控制目标,下层控制器则根据当前车辆状态及特性控制执行器实现期望加速度,通过与其他两种模型的仿真控制结果对比,该策略能够更有效的在较多车辆场景下实现协同换道控制,在多于3辆车同时换道的场景下完成了接近98%的换道成功率(其他两种仅为8%和30%左右,见图2),在保证安全的前提下提升通行效率。
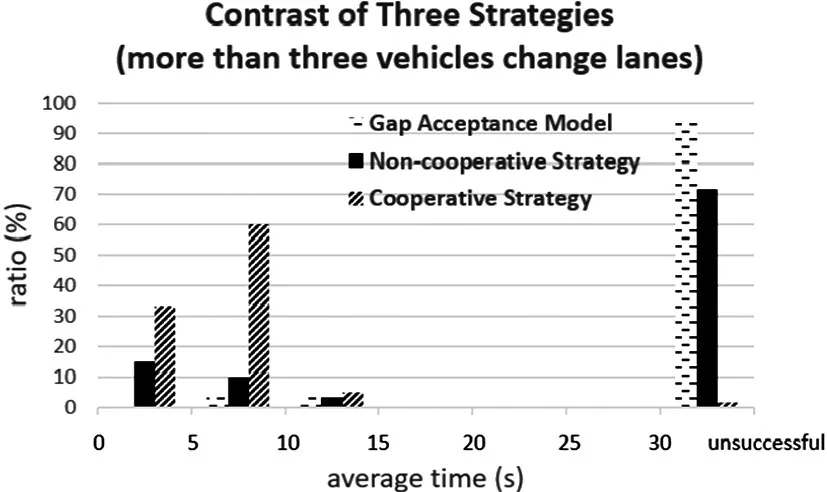
图2 多车辆协同换道成功率[8]
4 特种车辆的路径跟踪控制
特种车辆通常具有多转向轴、铰链连接、履带等结构特点,其自动驾驶路径跟踪控制减少了运营公司对于经验丰富驾驶员的依赖,在危险品运输等高危场景作业能够减少事故伤害,具有良好的应用场景。
Wang等[9]针对如图3所示的大型集装箱运输车辆的路径跟踪控制进行了研究,该类型车辆轴距较长,且装载货物质量不定导致车辆质心高度经常变化,车辆转向时如果侧向加速度过大有侧倾危险,因此其首先采用递归最小二乘法估计车辆质量,结合考虑侧倾特性的车辆三自由度模型及LQR最优控制方法,实现了有效稳定的自动路径跟踪控制。

图3 智能集装箱运输车[9]
Kang等[10]针对履带车辆的路径跟踪控制,创建了如图4所示的运动学跟踪模型,采用新型RBF神经网络的控制方式,以横向偏差和角度偏差作为网络输入,输出左右两侧履带旋转目标角速度,以产生不同滑移率控制车辆转向实现目标路径的跟踪,并证明了对地形具有良好的适应性,可应用于复杂的工作场景下。
Yutaka[11]等则对铰链式半挂车辆(图5)的自动泊车控制进行了研究,通过纯跟踪控制和铰链角的反馈补偿控制,实现了倒车过程中的路径跟踪,减少了泊车过程中对驾驶员高级驾驶技巧的依赖。

图4 履带车辆路径跟踪运动学模型[10]

图5 铰链式半挂车辆[11]
由此可以看出,在对特种车辆进行路径跟踪控制时,需要在车辆建模及控制目标中考虑车辆结构及行驶特点,保证路径跟踪精度及车辆稳定性。
5 结束语
简单场景下的自动驾驶路径跟踪控制技术已经发展成熟,当前研究热点主要在于提升控制效果和覆盖更多应用场景。
极限工况下的路径跟踪控制研究,促使自动驾驶覆盖场景越来越丰富,促进着自动驾驶技术逐步向L5等级进步。
网联技术使得自动驾驶车辆协同工作,可节约人力成本,提升整体安全性和道路通行效率。
特种车辆的自动驾驶可减少对于具有高级驾驶经验驾驶员的依赖,同时可减小高危场景下的事故人身伤害。
猜你喜欢
英语文摘(2022年9期)2022-10-26
内燃机与配件(2022年2期)2022-01-17
资源信息与工程(2021年5期)2022-01-15
少儿科学周刊·少年版(2020年9期)2020-03-04
科技与创新(2018年10期)2018-05-23
记者观察(2017年9期)2018-04-19
知识就是力量(2018年3期)2018-03-08
幼儿教育·父母孩子版(2017年12期)2018-02-28
财经(2017年24期)2017-10-21
金融经济(2017年9期)2017-09-13
