
联网技术在汽车中的应用
2018-09-04 09:37
汽车文摘 2018年9期
智能交通系统(ITS)的出现为改善交通网络的安全,交通运营环境的创新前景铺平了道路。联网汽车(CV)是一项颠覆性的智能汽车倡议,作为进一步赋予驾驶者自主权的下一波技术而出现。
1 联网汽车:一种创新的运输技术[1]
1.1 主要目的和原理
联网汽车,不仅能够增加路边安全,还可以通过开发整体智能交通系统为驾驶者提供服务,将有助于提高现有交通网络的容量。本章节讨论了两种主要类型的短程无线通信,即车辆到车辆(V2V)和车辆到基础设施(V2I)通信。简单描述两种无线通信的概念以及应用。讨论了CV的潜在效益及面临的挑战。
1.1.1 车辆到车辆(V2V)通信
通过V2V应用程序,司机将被告知即将发生的撞车事故,比如并线卡车在司机的盲区行驶的汽车,或者当前面的车辆突然停下时。警告形式包括:前端碰撞警告、紧急电子刹车灯、盲点/变道警告、不通过警告、交叉路口移动辅助和左转弯辅助。
1.1.2 车辆到基础设施(V2I)通信
通过V2I应用程序,当司机进入学校区域时,如果工人在路边,红绿灯即将改变,司机将被提醒。警告形式包括:弯道速度警告、红灯违章警告、停车标志间隙辅助、智能路边和过路行人警告。
1.2 CV的影响和潜在操作效益
1.2.1 对长期规划模型的影响
联网车辆技术将对目前使用的长期规划和土地使用模式产生深远的影响。它将为规划人员提供比以往任何时候都更深入的了解每一个步骤,从而可能产生更精确的模型,并为更好的决策提供更多的信息。例如在高速公路的几何设计、对容量和交通运行的影响、交通安全和环境效益方面,CV技术面临着挑战。
1.2.2 CV的开发和应用面临的挑战可以总结如下:
开发汽车比开发智能手机需要更长的时间。汽车制造商需要移动合作伙伴和汽车经销商,需要精确的技术解决为联网汽车服务付费的问题。
1.2 结论及改进
经过许多模拟,表明CV和AVs可以改善道路容量、稳定拥堵期间的交通流量,并减少信号交叉路口的延误。然而,为了充分理解移动数据需求和要求,需要对AV进行更多的研究,以决定容量改善和乘员舒适度之间的权衡。CV技术将提供现有交通网络的增加容量,此外,通过开发整体智能交通系统(ITS)的初步试验还为驾驶者提升路边安全性,以及在车辆和基础设施之间实现这些通信技术已经证明随着时间流逝可以带来更多的好处。这些概念将通过与其它车辆通信有助于改善路边安全,并通过道路网络传递这些信息,从而在集中交通管理系统和驾车者之间形成通信时机。该技术有助于在不久的将来彻底改变汽车业、交通工程设计和管理实践。基于其初始有效性,它是帮助解决美国目前和未来面临的运输问题的可行替代方案。联网车辆带来的安全、操作和交通网络环境的好处是显而易见的。同化联网车辆和长距离规划的必要性已经成为关键要点,特别是因为现在更加需要满足对未来的联网车辆技术要求而进行基础设施升级换代。如果长距离规划人员开始整合联网车辆和相关基础设施,我们将为更好的交通运输系统做好准备。
2 交通工具安全驾驶进入连接未来[2]
作者Outay研究多车协调任务的避碰问题。在现有的合作控制框架的基础上,提出了依靠实际可用障碍信息的避撞方法,并允许在不影响任务目标的情况下安全运行。探索了两种不同的避免障碍的策略。
首先考虑一种基于速度调整的方法,可以用来避免碰到移动的障碍物。可利用的障碍物信息,在现实世界中加以应用,不需要任何车辆偏离行驶路径。通过Lyapunov分析,证明了该算法能够确保满足车辆动力学约束以及安全分离约束。
其次,考虑避障的轨迹重新规划方法。适用于静态和移动障碍物,这种方法可能要求车辆偏离其原来预期的路径。避让机动引起的位置、速度和加速度的偏差较小,可以离线计算,这些边界可以在任务规划阶段使用,以保证满足车辆动态约束和车辆间的安全。这些算法通过使用B'ezier曲线和曲面来表示不确定的轨迹,利用障碍物轨迹的局部信息,而且计算效率高。该算法能够检测任何可能的碰撞并重新规划路径。由碰撞避免操纵引起的位置、速度和加速度的偏差是可以事先计算的。通过在初始任务规划期间使用这些界限,可以保证重新规划轨道的车辆动态加以约束和足够的车辆间安全距离。
3 基于环境感知的异构车辆网络结构[3]
3.1 主要目的和原理
联网车辆需要异构或混合通信技术,以实现全方位不同场景下的合作ITS服务。作者Sepulcre提出了一种基于环境感知的异构车辆网络结构。该体系结构与当前欧洲电信标准协会(ETSI)和国际标准化组织(ISO)标准的ITS站参考体系结构兼容,并允许根据驾驶环境条件和应用程序需求动态选择和配置通信行规。通过完成对异构V2I通信算法和评估工作,所提及体系结构的潜力显现出来,该算法提高了服务质量和满足车辆应用需求的能力,并降低了联网车辆服务的经济成本。
3.1.1 智能交通系统参考体系结构
本研究以图1所示ETSI ITS站参考结构为基线。该体系结构从网络和传输层面以及不同通讯技术角度考虑了不同的协议。应用程序从通信技术、网络和传输协议中摘录下来。设施层收集一组通用功能和数据结构,以支持协作车辆应用和通信。横向安全层负责安全和隐私保护。

图1 ETSI站点参考体系结构[3]
3.1.2 车辆节点
车辆节点(vehicle或RSU)负责:驾驶环境获取、驾驶环境推理、决策、评估、驾驶环境交换和模型更新。图2表示所提出的驾驶环境感知体系结构中的车辆节点上的组件。该图还将这些组件映射到标准化ETSI的站点参考体系结构的各个层级。驾驶环境获取、驾驶环境信息交换和模型更新的组件位于设施层。本研究建议在管理层定位上下文推理和评估的组件。决策组件分布在管理层和应用层之间。
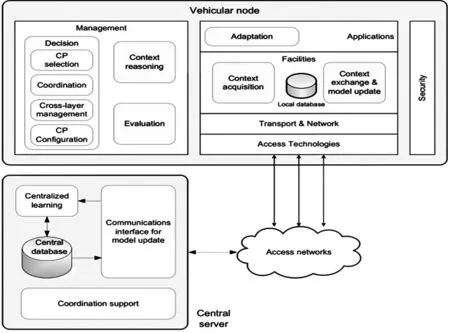
图2 系统架构组成部分[3]
3.2 结论
本章节提出了一种基于环境感知的异构车载网络结构。该结构是与当前的ETSI和ISO标准ITS站点参照结构相互兼容的衍生体。该体系结构基于环境条件和应用程序需求实现动态选择和配置通信行规。这特别对于联网车辆需要使用不同的通信技术来满足不同场景下的车辆需求来说至关重要。通过完成对异构V2I通信算法和评估工作,验证了所提体系结构的潜力。该体系结构和算法用于验证环境感知异构车辆通信如何可以提升服务质量改善可扩展性和通信基础设施的利用率,从而产生积极的经济影响。悬而未决的研究问题包括对异构V2V通信的架构的开发,或者多应用场景的分析。
4 用于车辆横向位置估计的V2I电磁系统[4]
4.1 主要目的和原理
本章研究了一台车辆对应基础设施(V2I)电磁系统过程,以便估算车辆在其车道上的侧向位置。该系统可以包含在高级驾驶辅助系统(ADAS)中,以便提供车辆的侧向位置,在非自愿的偏离车道或自动驾驶车辆时警告驾驶员。该系统由嵌入在车道标记中的无源电磁转发器组成,每个转发器包含两个具有两个不同中心频率的表面声波(SAW)谐振器,以及嵌入在车辆侧面的高频收发器。该系统工作在超高频(UHF)频段。采用相位差法(PDoA)来估算车辆与车道标记之间的绝对横向距离。提出了一种利用其频率响应围绕声表面波谐振器的两个谐振频率从系统整体响应中恢复有用相位的方法。该系统在室外环境下进行了测试,有效相位恢复方法的结果是准确的,而且绝对距离估算误差小于3 cm。
4.1.1 系统描述和绝对距离估算
本章提出的V2I系统由两个子系统组成(图3),第一个是一个无缘电磁转发器应答器,例如嵌入在车道标记下,由一个连接到两个表面声波(SAW)谐振器的半波偶极子组成,这两个谐振器具有高质量的因素。第二个子系统是嵌入在车内的超频率模块,它集成了电子电路和两个天线于一体,一个用于发射,另一个用于接收电波。微带贴片天线被用来简化其车辆侧面的整合。把表面声波谐振器集成到转发器的目标就是从转发器引入弱反射波信号。因此,在许多其它叠加的伪波中更容易检测出转发器后向散射信号。

图3 开发的V2I横向定位系统框图[4]
4.2 结论
本章提出了一种用于道路车辆绝对横向距离估算的电磁V2I系统。所开发的系统是基于车辆的高频收发模块和嵌入在车道标记下的无源转发器之间的通信。收发模块在[867.5 MHz,869.5 MHz]和[914 MHz,916 MHz]这两个频率范围内查询,转发器通过两个具有高质量因素的表面声波(SAW)谐振器为每个频率范围的测量信号添加特色。一个稳健的系统响应建模和一个高效的转发器信号提取算法,从整个测量信号角度,允许提取其两个频率范围所允许的误差相位。这使得用相位差法估算绝对横向距离成为可能。该系统已在室外环境中进行了20到164 cm的测试,取得的精度±3 cm的绝对距离。
由于该系统在实际环境中进行了静态测量测试,并利用所提取相位允许误差对转发器信号提取算法进行了验证,下一步就是将该系统集成到一个真正的车辆以及转发器集成在车道标记内。对测量原理的影响可以忽略不计。考虑到车速的影响,在距离估算过程中,鉴于转发器距离估算期间准静态特性,考虑到车辆速度问题,测量时间必须足够短。例如,以现有技术可以做到在130 km/h的测量时间估算约1 ms,达到2 cm的精度。速度的另一个后果是多普勒效应,导致最大频移100 Hz。与10 kHz中频相比,这种频移很小,相位误差可以忽略不计。
5 基于多层异构网络的车辆到基础设施通信[5]
5.1 主要目的和原理
车辆到基础设施(V2I)通信对于智能交通系统(ITS)的成功部署和运行至关重要。我们可以看到,关于V2I通信在第五代(5G)网络中有效性的研究兴趣日益浓厚,该网络支持使用多种无线电接入技术的多层异构无线网络(rat)共存。本章的目的是介绍异构多层网络环境中V2I通信的基本特征。我们首先概述了一些值得注意的V2I应用程序和与V2I相关的项目。然后,我们将重点放在异构多层网络上的V2I通信上。
5.1.1 V2I通信标准
车辆网络的标准化促进许多标准协议被用于提升车辆网络技术。专用短程通信(DSRC)和WAVE是车辆网络标准协议的典型例子。这些协议的主要目标涉及定义频率分配、通信体系结构、消息传递、应用程序管理和安全算法。另一方面,3GPP Service and System Aspects Group目前正在进行一项名为“对V2X服务的LTE支持”的研究。
5.2 结论及建议
本文对异构多层网络环境下的V2I通信进行了综述。作者Ndashimye将讨论与V2I相关的应用程序、全球研究计划和底层网络。Ndashimye确定并讨论了主要的研究挑战及其可能的解决方案。Ndashimye的建议总结如下。
(1)高效的网络发现:Ndashimye需要将车辆要连接的相关底层网络的网络发现时间最小化。在异构的多层网络环境中,开发一种高效的以异构多层,多-RAT网络环境支持高速车辆行驶的发现机制,可能是一个正在进行的研究课题。
(2)底层网络选择:非最优网络选择可能降低切换性能。
(3)执行快速、无缝和可靠的垂直切换:在异构的多层、垂直切换的关键问题是处理频繁的对非最优网络进行切换。为了在5G密集网络中实现无缝、有效的V2I通信,需要进行良好的研究和标准化工作。
(4)V2I通信中的QoS需求:设计适用于V2I通信的无缝垂直切换算法时的主要问题,是在高机动性和底层网络的不同需求的约束下,满足不同应用程序的不同QoS需求。
(5)V2I通信中数据的传播。
(6)V2I通信安全:PKI算法虽然很有前途,但目前还不适合以目前形态用于延迟敏感应用。为满足V2I应用要求,还留有寻求重新设计PKI的空间。此外,还需要开发入侵检测系统,使车辆/RSU能够区分伪造和有效消息。
(7)V2I上层通信协议:在讨论的协议中,在提供垂直切换时,NEMO和PMIPv6前景看好。但为支持异构多层网络中的无缝V2I通信,应该对其进行修整。为支持在5G异构密集网络环境中无缝垂直切换,开发与之相匹配的标准化协议还有空间。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
计算技术与自动化(2022年2期)2022-07-04
高教学刊(2022年13期)2022-05-24
中国信息化(2022年4期)2022-05-06
小学教学研究(2022年5期)2022-04-28
建材发展导向(2021年24期)2021-02-12
电子制作(2019年10期)2019-06-17
福建基础教育研究(2019年11期)2019-05-28
世纪之星·交流版(2017年6期)2017-10-09
世纪之星·交流版(2017年3期)2017-07-03
