水中兵器弹道测量技术现状和展望
2018-09-03 09:01:14张思宇何心怡
水下无人系统学报 2018年4期
张思宇, 何心怡, 祝 琳, 刘 扬, 陈 双
水中兵器弹道测量技术现状和展望
张思宇, 何心怡, 祝 琳, 刘 扬, 陈 双
(海军研究院, 北京, 100161)
水中兵器弹道测量系统以水声定位技术为核心, 其弹道测量精度与水中兵器试验定型、日常训练和作战使用的性能评估紧密关联。针对水中兵器弹道测量精度要求高的问题, 文中系统梳理了现有水中兵器弹道测量技术, 根据物理场和应用背景差异, 将现有测量技术分为基于声场的水下主被动弹道测量技术、基于惯性场的水中兵器内弹道测量技术和基于光场的水下光学弹道测量技术, 分别论述了其技术原理和性能特点。同时结合鱼雷等水中兵器高机动、低噪声的发展方向及其作战训练向远海水域拓展的需求变化, 对三类测量技术发展方向进行了展望, 旨在为水中兵器弹道测量技术研究提供参考。
水中兵器;弹道测量;水声定位
0 引言
随着新技术的发展和应用, 水中兵器的性能有了质的提升, 呈现出智能化、高机动、高航速、大航程和大威力的特点。在水中兵器的研制、试验和训练使用过程中, 需要精确测量其水下弹道, 评估武器装备性能, 研究制定训法和战法。因此, 对具有高精度、高刷新率和强数据处理能力的水下弹道测量系统需求十分迫切。
文中梳理了现有水下弹道测量系统的研究成果, 结合对水中兵器的性能评估要求, 根据不同物理场将水中兵器弹道测量系统分为光场作用的水下光学弹道测量系统、惯性场作用的水中兵器弹道内测系统和声场作用的水中兵器弹道主被动测量系统, 分别介绍了各自的技术特点, 重点分析了主被动外测系统的原理、特点及使用范围。并对该领域未来技术发展方向进行了展望。
1 基于声场的水下主被动弹道测量技术
声场作为在水中传播效果最好的物理场, 可以实现在水中大范围有效传播。因此, 国内外水中兵器靶场广泛使用以水声定位技术为核心的水中兵器弹道外测系统实现对水中快速运动目标高精度实时轨迹测量, 以检验武器装备性能[1]。外测系统分为主动式和被动式2大类, 主动式外测系统通过在目标上加装声学装置来实现大范围水中目标的跟踪测量; 被动式外测系统将目标辐射噪声作为信号来实现测量[2]。
1.1 基于声场的主动式弹道测量系统机理
主动式弹道测量系统一般在目标声源加装声信标, 系统通过接收由声信标发射的声信号, 测量相关参数, 解算目标坐标和运动轨迹。主动式测量系统分类方法较多, 文中按照系统基线的长度, 将测量系统分为: 长基线(long baseline, LBL)测量系统、短基线(short baseline, SBL)测量系统、超短基线(ultra short baseline, USBL)测量系统, 表1所示是其分类标准[3]。

表1 主动测量系统分类
1.1.1 LBL测量系统
LBL测量系统由固定在海底的应答器基阵和安装在被测目标上的声学装置两部分组成, 主要采用同步定位法和非同步定位法。测量试验前通过标校海底应答器在大地坐标系上绝对位置确定阵形, 保证系统解算目标的实时大地坐标位置, 如图1所示。

图1 长基线测量系统示意图
同步定位法测量时, 利用安装在目标上的同步声信标, 由干端信息处理中心对信标和基阵同步授时, 通过测量同步声信标发射信号到达海底基阵的时间计算目标距离, 利用球面交汇模型解算目标运动轨迹。图2为同步定位法的几何模型。

图2 同步定位法几何模型图


一般只要布放3个阵元就可以实现对目标的定位, 当布放阵元大于3时, 可以得到多组位置解, 利用最小二乘法计算, 得到更高精度的位置坐标。
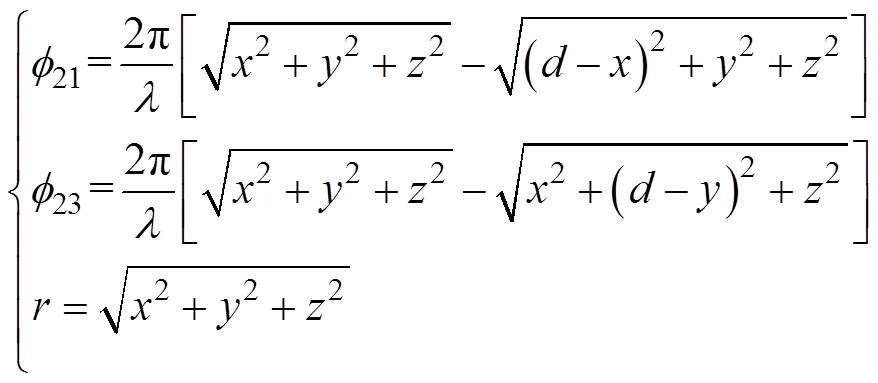
非同步定位法测量时, 几何模型和同步法相同, 通过安装在目标上的收发机发射问询信号并记录发射时间和到达各应答器时间, 计算目标和各应答器之间的距离[3-5]。每一组测得参数确定目标的一个球面方程, 即

式中:t为信号发射时刻与接收时刻的对时误差。
由于2个应答器基阵之间的距离是固定值, 通过其对应的球面方程可以确定一个双曲面, 得到非同步定位法的模型——双曲面交汇模型。因而不需要测量目标深度等信息, 可以直接解算出目标坐标, 简化了目标声源设备。考虑到只有2个海底应答器会产生距离模糊, 实际至少在海底安装3个以上应答器, 得到冗余信息, 确保测量的高精度[6]。
LBL测量系统的优点是不需要专门测量目标深度, 基线长度长、孔径大、定位精度高, 可以在较大范围水域内对多个目标跟踪测量。局限是: 系统构造复杂, 成本高; 基阵固定在海底, 没有机动测量能力; 海底应答器坐标需要校准标定; 且测试数据的更新率低, 测试花费时间长。另外, 为了获取更高的定位精度, 通常使用高频或者甚高频声信号, 但是高频信号在水中衰减速度快, 限制了系统的测试范围。此外, 大范围的目标测量必然涉及到长距离数据传输, 传统的多频频移键控(M-ary frequency shift keying, MFSK)和多相键控(M-ary phase shift keying, MPSK)2种方法, 存在传输距离较短和环境适应能力弱的局限性, 影响了系统测试性能的发挥。值得关注的是近年来使用水声扩频技术的水声调制解调器(modem)装备逐渐投入使用, 具有较远的传输距离和较低的误码率, 且环境适应性较强, 可以应用于水下外测系统的升级。
1.1.2 SBL测量系统
SBL测量系统通过测量目标声信号到达阵元之间传播时间差进而解算出目标的距离和方位等信息, 有海底(湖底)布放式和船载式2种布放方式。海底(湖底)布放通常用于内湖或是近海岸的试验场, 船载式由于具有机动能力, 通常用于远岸水下目标测量[7]。文中以船载式为例, 船载式SBL测量系统按照三角形或四边形的形状将水听器安装在大型船底部, 通常有3个基元就可以完成测量, 增加1个基元的冗余可以提高测量的精度, 一般基线长度在几米到几十米之间, 故称为SBL测量系统。图3为船载式SBL测量系统示意图。

图3 船载式短基线系统示意图
SBL测量系统几何模型和LBL基本相同, 有同步定位原理的“球面交汇模型”和非同步定位原理的“双曲面交汇定位模型”, 通过各阵元测得的多个斜距值, 根据基元和船体坐标系的相对关系解算出目标的大地绝对坐标。但是, 目标的坐标位置受船体姿态影响, 需要配装外部传感器如GPS、运动参考单元(motion reference unit, MRU)、罗经(Gyro)来提供解算所需船体姿态、位置、船艏方向值等信息。目前, SBL测量系统是一种广泛应用于水中兵器靶场的轨迹测量系统。另外, 澳大利亚Nautronix公司生产的NASD rill RS925型SBL定位系统能够在全海区工作, 具备深海调查和勘探能力。我国也有类似的水声高速目标跟踪定位和导引系统(TOSS-I靶), 具有较高的数据刷新率, 可拆卸移动和软件修正基阵等技术特点,接近国际先进水平[8]。
1.1.3 USBL测量系统
USBL测量系统的各基元之间的距离在几厘米到几十厘米的量级, 可以将所有的基元集成在1个收发装置中, 组成声基阵系统。其工作原理和SBL测量系统类似, 但是由于USBL测量系统各阵元之间距离很小, 故只能测得声信号到达各阵元的相位差, 解算目标方位角和俯仰角, 并由系统测得信号传播时间解算目标斜距, 实现目标定位, 系统模型如图4所示。图5为USBL的几何模型图。
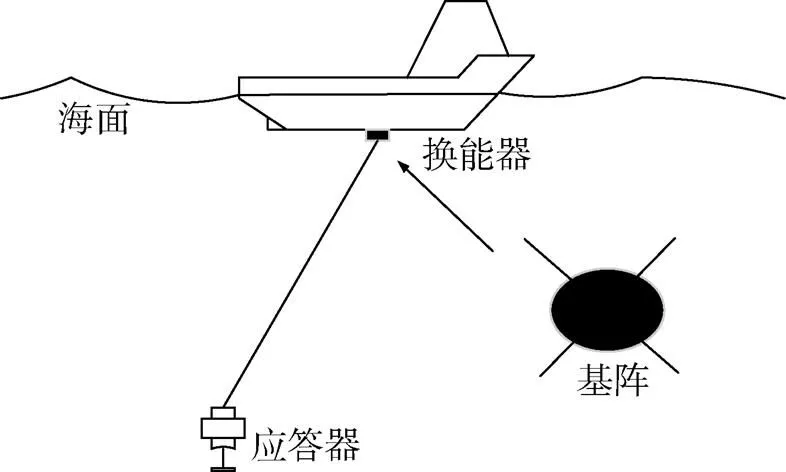
图4 超短基线系统示意图

图5 USBL系统几何模型图

由于USBL测量系统也是安装在船体, 其测得目标方位信息受船体姿态影响很大, 同样需要安装外部传感器确定船体姿态, 以得到精确的目标坐标。目前, 挪威Kongsberg Simrad公司的HIPAP-700是世界上唯一可在10 000 m水深工作, 定位精度达0.5 m的测量系统[1], 法国Oceano Te- chnologies公司的相关产品可达6000 m以上的工作深度和8000 m的作用距离, 广泛应用于深海目标定位和水中兵器试验的轨迹测量以及水下机器人的定位和导航领域[9]。近年来, 我国USBL测量系统设备研发也取得了重要进展, 哈尔滨工程大学研制了首套拥有完全自主知识产权的“长程USBL定位系统”已达到8 000 m的作用距离, 定位精度达到了5‰[10]。
当前, USBL定位系统有如下发展方向。
1) 和LBL测量系统组合使用, 提高定位精度和扩大作用范围。
2) 与多普勒计程仪组合使用, 实现水下无人系统的导航和定位。
3) 加装水下通信系统, 同时实现系统的定位和通信功能(美国LinkQuest公司已有产品[8])。
4) 优化阵型设计, 如构建立体阵, 增加信息的冗余度, 提高定位精度。
单独使用现有某一定位系统, 系统定位精度已达瓶颈, 将LBL、SBL、USBL系统等多方面的测量信息, 利用人工智能和神经网络算法的进步, 实现有效的信息融合, 是定位系统发展的重要方向。例如国外的Oceano公司、Honeywell公司和Simard公司都推出了综合定位系统, 既可以发挥USBL测量系统机动灵活的优势又兼具LBL系统高定位精度的优点。
1.2 水中兵器弹道被动式声学测量系统机理
被动式声学测量系统将目标的辐射噪声作为声信号实现定位测量。其应用的技术主要有: 三元子阵定位技术、匹配场(matched-field proce- ssing, MFP)定位技术、目标运动分析(target motion analysis, TMA)定位技术[9]。
1.2.1 三元子阵定位技术

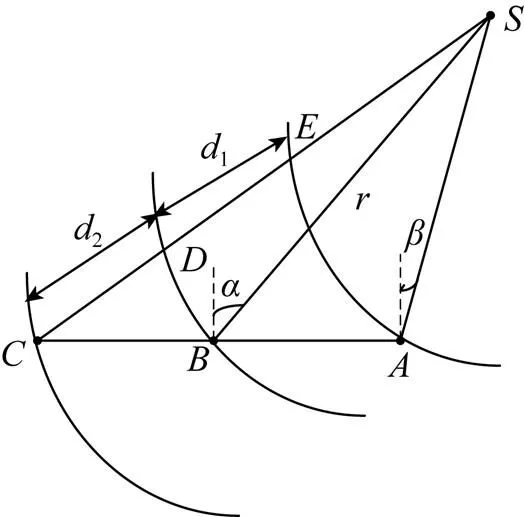
图6 三元阵被动定位模型图


由式(4)可解算得目标的方位角和距离信息, 并进一步算得其坐标信息, 实现目标定位和轨迹测量。
在被测目标距离很近时, 波阵面的曲率足够大, 各阵元能有较高的时延测量精度, 可获得较好的末弹道测量效果[10]。但是, 受到基阵孔径的限制, 随着探测距离的增加, 波前曲率变化率逐渐减小, 相对时延误差逐渐增加, 因而距离测量误差也增大。
1.2.2 MFP定位技术
MFP定位技术的基本原理是通过基阵测得的声场参数, 选定一个声场参数已知的传播模型, 对该模型下不同方位和距离的声场与测量声场进行互相关运算, 相关度最大的声场对应的方位和距离就是目标声源处的方位和距离, 其实质是根据基阵处实测声场和理论预测声场的匹配性估计参数, 确定目标位置的一项技术, 核心主要是3个方面。
1) 选择能够精确描述声场的水声信道模型。
2) 确定实际和模拟声场分布的匹配函数。
3) 选择高精度、稳健、快速匹配场处理算法。
MFP可克服传统几何定位法受到声信号传播的多途效应、简振波的相干性和平面信号场模型的限制, 实现超远程目标定位。但是, MFP受环境参数测量误差较大、布阵要求高和计算量大等条件的限制, 对高速目标跟踪测量仍较难实现。
自20世纪80年代起, 随着信号处理和传感器技术的发展, 可借助被动声呐系统得到较高精度测得目标方位、距离和深度, 较精确预测声场环境参数并构建了较高精度的评估模型, MFP技术也取得了长足的发展。目前, 美国相关实验系统定位精度已经达到1 m的量级。国内已有相关装备样机装艇试验, 取得了30 km作用距离, 约12%~15%测距精度的试验效果[9]。实现MFP技术在水平方向基阵的使用、高速运动的跟踪定位和MFP的宽带信号算法将成为未来研究的热点。
1.2.3 TMA定位系统
TMA定位系统的弹道测量方法主要是利用平面波传播模型, 测量目标方位等参数, 并估计目标速度、距离等运动参数, 形成目标弹道的一种被动测量方法。纯方位TMA主要依靠单基阵声呐被动测量目标的方位信息来估计目标的距离、航速和航向等运动参数。纯方位被动水声定位原理如图7所示。图中:和是2个方向性阵元, 2个阵元之间距离为;点为阵元之间中点;为目标声源到达基阵中心的距离。

图7 纯方位目标运动分析定位模型图

由于受限于基阵和被测目标同时匀速直线运动, 则目标运动不可测, 需要测量平台至少机动一次, 限制了该方法的实际应用[11]。在此基础上, 科研人员经过大量的试验研究, 逐渐发展了以多基阵信息融合技术为基础的方位-多普勒TMA技术、方位-时延差TMA技术和时空积分STI-TMA技术等方法, 从而实现对目标轨迹的精确估计。方位-多普勒TMA是通过测量目标辐射噪声的频率信息, 经过目标方位和频率联合估计目标运动参数, 测量平台不需要机动, 有较高的实用性。时空积分STI-TMA是为了克服传统TMA先检测、后定位, 需要高信噪比和长处理时间的局限, 通过直接处理基阵测量数据, 利用能量积分克服方位和频率随时间变化的限制, 增加积分时间, 提高低信噪比目标检测能力。方位-时延差TMA以使用多基地声呐为背景, 利用各基地声呐测得的方位信息和互相关器测得的目标信号时延差, 实现精确TMA。以上方法和传统纯方位TMA相比, 计算量大, 因此快速算法是这些方法实现的关键因素。
被动式水声弹道测量系统优势在于不依赖在目标加装声信标, 只凭借目标辐射的噪声信号确定目标运动轨迹, 测试效率高, 受环境限制小。但是, 被动式测量系统也存在测量精度低、实时跟踪能力弱的局限性, 有待进一步解决。目前, 国外尚无公开报道被动式水下弹道测量系统的研究现状, 国内主要有东南大学研制的鱼雷弹道测量系统(YTM)[12]。
2 基于惯性场的水中兵器弹道内测技术
内测法作为外测法的重要补充和辅助测量手段, 在水中兵器的试航试验、跟踪活动靶性能和脱靶量测量等方面有着广泛的应用。内测系统利用自身的惯性组件(inertial measurement unit, IMU)记录加速度、角速度和深度等航行参数, 监视水中兵器的姿态和航迹, 测试完成打捞出水后, 经过数据处理获得目标的航行姿态和航迹[3], 评估武器装备性能和部队训练水平, 但存在不能实时获取目标的姿态和轨迹信息的局限。
弹载内测系统的惯性组件直接安装在弹体上, 受水文环境影响较小, 具有比较高的测量精度, 测量结果可靠性较高, 通常作为外测参数的对比值。但是, 实际系统的IMU等设备安装误差的存在和各种电子线路和测量装置的噪声造成实际弹道测量误差的存在。故如何通过有效的数据处理, 提取精确的目标信息, 仍是获取较高精度姿态和航迹的关键。现代水中兵器内测系统的核心元件IMU普遍使用光纤陀螺仪替代传统机械式陀螺仪, 具有体积小、抗干扰能力强, 能瞬时启动的优点。
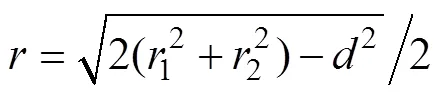
20世纪以来内测系统发展阶段大概为: 20世纪50年代以机械敏感元件为核心的测量装置; 60年代以电子元件为核心的测量装置; 70年代末我国研制出第1款鱼雷的定深装置; 80年代以后, 各国均在大力发展以微处理芯片为核心的测量系统, 如美国的“MK48ADCAP”、意大利的“A290”、英国的“Spearfish”等, 其基本原理如图8所示。
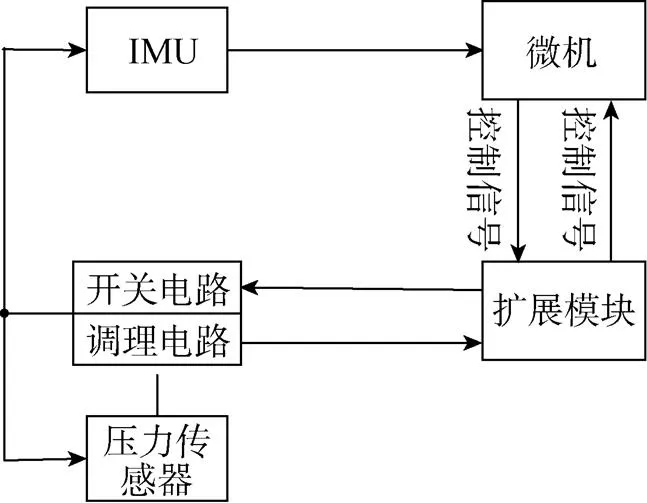
图8 微机化内测系统结构原理图
内测系统测量记录装置由20世纪50年代的机械式记录装置, 如速度仪记录水中兵器的航行时间、速度、深度、横滚角变化量等信息, 分析装备性能; 发展到60年代的光线示波器、磁带记录仪等; 到80年代以来的内测微机系统, 具有体积小、存储量大、通用化程度高的优点, 有效降低了研发成本, 广泛应用于各型水中兵器。测量的信息也从最初单一的模拟量发展到数字量, 现代化内测系统还可以记录水中兵器的噪声信号、声学图像信号, 实现了图像化的记录处理[13]。
3 基于光场的水下光学弹道测量技术
水中兵器弹道光学测量系统主要利用波长在450 ~550 nm之间的蓝绿激光衰减系数比其他光波段要小很多(约为0.01/m), 故海水存在一个蓝绿光的透光窗口这一特性而设计。图9中, 水下光学弹道测量系统主要由激光收发器、激光扫描系统和信号处理基站等几部分组成, 通过至少3台标定坐标的激光收发器以相同的扫描速度发射激光形成空间光幕区域对目标进行跟踪, 当目标处于光幕区域内, 激光收发器接收目标反射光信号, 通过激光探测器感知光波信号的强度变化, 解算目标到探测器的距离, 并由纯斜距定位模型求得目标的坐标, 拟合出水中兵器的弹道。
图9 水下光学弹道测量系统原理示意图
激光测量的主要难点是水介质通过吸收和散射作用使激光在传输中衰减。吸收主要表现为激光能量的衰减, 可以通过发展高质量、大能量的激光和单光子探测技术提高激光抗吸收损失的能力, 目前也取得较好进展。散射是激光传输方向的改变, 分为前向散射和后向散射, 是目前影响探测效果的最大障碍, 主要表现如下。
1) 由于激光在水中传输速度快、水介质的后向散射强, 导致远处反射光信号比近处反射光信号在极短的时间内有很大的衰减。
2) 激光波束的脉宽很窄(≤10 ns), 很难变换到频域进行信息提取, 只有提高信噪比才能提高时域的信息提取能力, 但水中噪声干扰强烈而复杂, 测量精度很难保证。
解决以上技术难点, 多从过滤散射光, 提高信噪比的角度着手, 主要有距离选通技术、偏振接收技术和同步扫描技术。
从上世纪80年代起, 美国、俄罗斯、瑞典等国家先后研制出基于Nd: YAG激光器的机载激光探潜探雷系统, 探测深度均已经达到30 m以上, 有较好的实用性能, 如美国卡曼公司的Magic Lantem 90, 西屋电气的SM2000系列正广泛应用于军事和民用领域[14]。近年来, 国外海军正在发展可以安装在舰艇和无人水下航行器上的水下激光成像和测距系统, 用于水下探测、反潜和猎雷等相关任务。我国在这方面起步较晚, 只开展了一些预先研究, 和国外先进国家有较大的技术差距[15-16]。
未来应着力攻克水介质散射导致激光测量精度不高的技术难点, 积极发展高功率、高指向性、小型化的激光器, 进一步提高水下目标探测能力, 使激光测量系统成为水中兵器试验、水下侦测的重要手段。
4 水下弹道测量技术展望
随着水中兵器性能不断提高, 和相关测量定位技术的发展进步, 并结合水中兵器试验、训练和作战使用的新要求, 水下弹道测量技术发展趋势如下。
1) 鉴于现有单一定位系统测量精度难以得到较大提高且水中兵器试验、训练的多目标、大范围科目明显增加, 现有定位跟踪系统难以胜任。因此, 应借鉴国外先进经验, 重点发展大型综合水下弹道测量系统, 利用信号处理和信息融合技术, 提高定位精度和多目标同时跟踪定位能力。
2) 在部队实战化训练的大背景下, 许多场合不便在水中兵器上加装声信标或者应答器等设备, 限制了主动测量系统的使用, 使得高精度、实时性强的被动定位系统有广阔的应用前景[17]。其中研究人员应重点关注以多基阵信息融合技术为基础的TMA技术和以精确传播模型为基础的MPF技术被动定位系统的发展, 实现对目标轨迹的有效、可靠测量。
3) 随着遥控水下航行器、自主水下航行器的广泛应用, 不仅需要精确定位水下无人系统, 还应注重在系统加装多普勒计程仪、水下通信系统等设备, 适应未来应用的多功能需要。但是受到水文环境的限制, 传统的方式数据传输率低, 误码率高。因此, 水声扩频技术等新兴水下数据传输方式, 应引起足够重视。
4) 基于光场的水下定位系统主要还是受限于水介质对激光强烈的衰减和散射作用, 仍需重点突破浑浊水体的激光散射抑制和超扩散传输理论[18]。因此, 实现水下激光在多重散射背景下的远距离传输, 是未来水下激光定位系统发展的重要方向。
5) 基于惯性场的水下定位系统IMU的安装误差和陀螺漂移是不可避免的, 应利用神经网络等新算法优化误差估计, 同时改进捷联惯性测量系统姿态算法, 提高测量精度。光纤陀螺本身精度对测量精度有重要影响, 应将三轴高精度高可靠光纤陀螺仪作为重点发展方向。
水中兵器和水下定位系统性能提升是一个螺旋上升的过程, 互为彼此、相互促进。唯有紧跟技术发展方向, 深入研究新型水中兵器目标特性变化, 不断推动水下测量系统技术提升, 才能满足现代海军水下武器装备研制、定型和训练使用的需求。
[1] 李想. 水下高速运动目标轨迹测量技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2011.
[2] 党建武, 黄建国. 球坐标系中水下目标跟踪的研究[J]. 信号处理, 2004, 20(3): 311-314. Dang Jian-wu, Huang Jian-guo. Research on Underwater Target Tracking in Spherical Coordinate System[J]. Signal Processing, 2004, 20(3): 311-314.
[3] 田坦. 水下导航与定位[M]. 北京: 国防工业出版社, 2007.
[4] 陈晓忠. 长基线水声跟踪系统抗多途及抗距离模糊研究[D]. 哈尔滨: 哈尔滨工程大学, 2005.
[5] 刘林泉. 水声综合测控系统关键技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2008.
[6] 毛卫宁. 水下被动定位方法回顾与展望[J]. 东南大学学报(自然科学版), 2001, 31(6): 129-132. Mao Wei-ning. Review and Prospect of Underwater Passive Location Method[J]. Journal of Southeast University(Natural Science Edition), 2001, 31(6): 129-132.
[7] 赵龙龙. 矢量传感器三维末段轨迹测量技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2008.
[8] Paul R,Oscar P.Towards Geo-Referenced AUV Naviga-tion through fusion of USBL and DVL Measurements[C]// OCEANS 2006, Asia Pacific: IEEE, 2006.
[9] 刘俊. 长基线水下导航定位技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[10] 徐栋. 哈尔滨工程大学长程超短基线定位系统获国家技术发明二等奖[EB/OL]. (2017-01-09)[2018-05-20]. http://www.sxgfgb.gov.vn/MessageShow.asp.
[11] 杨志权, 刘松海, 王文学. 鱼雷实艇靶末弹道测量算法分析与误差仿真[J]. 鱼雷技术, 2003, 11(4): 34-38.Yang Zhi-quan, Liu Song-hai, Wang Wen-xue. Analysis and Error Simulation of Ballistic Measurement Algorithm for Targets of Torpedoes[J]. Torpedo Technology, 2003, 11(4): 34- 38.
[12] 杨娟. 水下动目标被动跟踪关键技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2007.
[13] 徐宇明. 水下航行器内测系统及数据处理方法研究[D]. 西安: 西北工业大学, 2007.
[14] 江南, 黄建国, 李姗. 长基线水下目标定位新技术研究[J]. 仪器仪表学报, 2004,25(4):77-80.Jiang Nan, Huang Jian-guo, Li Shan. Research on New Underwater Target Positioning for Long Baselines[J]. Chinese Journal of Scientific Instrument, 2004, 25(4): 77-80.
[15] 章正宇, 周寿桓. 水下目标探测中的激光技术[J]. 西安电子科技大学学报, 2001, (6): 797-801. Zhang Zheng-yu, Zhou Shou-huan. Laser Technology for Underwater Target Detection[J]. Journal of Xi’an Electronic and Science University, 2001(6): 797-801.
[16] 郑艳芳, 刘西站, 陈良益. 电光调QNd_YAG蓝绿激光在水下弹道测量中的应用研究[J]. 激光与红外, 2008, 38(10): 978-980. Zheng Yan-fang, Liu Xi-zhan, Chen Liang-yi. Applied Research of the Nd:YAG Electrooptic-modulated Bluegree Laser for Ballistic Trajectory Measurement under Water[J]. Laser and Infrared, 2008, 38(10): 978-980.
[17] 何心怡, 钱东, 王光宇, 等. 水文条件对鱼雷声自导作用距离的影响[J]. 鱼雷技术, 2007, 15(5): 33-36.He Xin-yi, Qian Dong, Wang Guang-yu, et al. Influence of Hydrological Conditions on Torpedo Homing Distance[J]. Torpedo Technology, 2007,15(5): 33-36.
[18] 彭波. 水下近程目标激光探测技术[M]//中国工程物理研究院科技年报. 成都: 四川科学技术出版社出版, 2016: 182-184.
(责任编辑: 杨力军)
Present Situation and Prospect of Trajectory Measurement Techniques for Underwater Weapons
ZHANG Si-yu, HE Xin-yi, ZHU Lin, LIU Yang, CHEN Shuang
(Naval Research Academy, Beijing 100161, China)
Underwater weapon trajectory measurement system is based on underwater acoustic positioning technology. Its measurement accuracy of underwater trajectory is closely related to the performance evaluation of underwater weapon in terms of approval test, training and operational application. In view of trajectory measurement of underwater weapons with high precision, this paper sums up systematically the existing underwater weapon trajectory measurement techniques. According to the differences of physical field and application background, the existing measurement techniques are divided into three categories: 1) the active and passive underwater trajectory measurement techniques based on sound field; 2) the internal trajectory measurement techniques of underwater weapons based on inertial field; 3) the underwater trajectory measurement techniques based on optical field. Their technical principles and performance characteristics are discussed, respectively. Considering the developing trend of torpedo and other underwater weapons towards high maneuver and low noise as well as the demand for extending their operational training to open sea, development directions of the three kinds of measurement techniques are predicted to provide a reference for the research in this domain.
underwater weapon; trajectory measurement; underwater acoustic positioning
TJ630; TJ410.6
A
2096-3920(2018)04-0283-08
10.11993/j.issn.2096-3920.2018.04.002
张思宇,何心怡, 祝琳, 等. 水中兵器弹道测量技术现状和展望[J]. 水下无人系统学报, 2018, 26(4): 283-290.
2018-05-02;
2018-07-02.
张思宇(1992-), 男, 在读硕士, 主要研究方向为鱼雷自导与水声信号处理.
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09 03:22:48
电子制作(2019年7期)2019-04-25 13:17:48
水下无人系统学报(2018年5期)2018-11-09 07:40:54
现代兵器(2017年10期)2017-10-14 16:53:23
现代兵器(2017年8期)2017-09-15 21:45:09
声学与电子工程(2017年1期)2017-06-22 11:30:07
现代兵器(2016年8期)2016-08-15 17:07:36
制导与引信(2016年3期)2016-03-20 16:02:02
西北工业大学学报(2015年3期)2015-12-14 13:08:44
声学技术(2015年1期)2015-09-07 06:44:52