声自导鱼雷二次转角作战使用方法
2018-09-03 09:03:56张静远
水下无人系统学报 2018年4期
李 华, 张静远
声自导鱼雷二次转角作战使用方法
李 华, 张静远
(海军工程大学 兵器工程学院, 湖北 武汉, 430033)
针对声自导鱼雷在一次转角作战方式下, 存在鱼雷与目标相遇时目标多普勒速度未能达到自导检测阈值导致难以检测到目标的情况, 从目标多普勒速度与鱼雷自导检测阈值分析入手, 提出满足鱼雷自导检测的二次转角作战方式, 并建立模型。通过蒙特卡洛法求解声自导鱼雷在一次转角作战方式和改进后二次转角作战方式下的发现概率, 并考虑目标机动的情况。结果表明, 改进后的二次转角作战方式可提高声自导鱼雷的发现概率。
声自导鱼雷; 目标多普勒速度; 二次转角; 发现概率
0 引言
鱼雷作为水下重要武器之一, 对其作战使用方法的研究极其重要。在使用自导鱼雷作战时, 主要采取的方式有单雷射击、双雷齐射或多雷齐射。在采用单雷射击的情况下, 从弹道程序上分析, 主要是考虑鱼雷的一次转角[1], 针对鱼雷和目标的阵位态势, 寻求使鱼雷以最高概率发现目标的有利提前角[2]。在采用双雷齐射或多雷齐射的情况下, 主要有2种组织实施方式: 扇面齐射和平行航向齐射[3]。平行航向齐射是指2条鱼雷或者多条鱼雷在水平面上分别执行一次转角航向后, 呈展开态势分别执行二次转角前的直航距离, 再分别执行二次转角, 进而呈并行方式向前搜索目标, 因其有较好的使用效果, 是自导鱼雷齐射的主要方法。
目前, 对于声自导鱼雷作战使用方法研究很多, 如对一次转角射击模型优化[1-2], 或提出基于相遇态势的二次转角射击模型研究[4], 也有对双雷齐射的研究[3], 在仿真中都能起到提高鱼雷发现目标概率的作用, 但是普遍都出现了忽略声鱼雷自导检测逻辑的问题。
文中基于鱼雷自导检测逻辑原理, 提出目标不可攻角和可攻角, 针对声自导鱼雷单雷一次转角作战方式下可能存在的问题, 提出改进的二次转角射击模型, 并通过仿真计算, 寻求最佳的二次转角射击模型。
1 二次转角作战方式的必要性分析
当鱼雷单雷射击时, 按照理论考虑有利提前角, 鱼雷执行一次转角航向后, 按确定的航向直航搜索直航目标, 这种研究方式较为合理, 但存在考虑不够全面的缺点, 体现在缺乏对鱼雷自导检测逻辑的研究。在鱼雷自导接收机中, 通常会设有中心频率等于发射信号频率与鱼雷自身运动导致的多普勒频率之和的陷波器, 从而达到很大程度降低混响干扰的效果。当目标静止时, 回波信号频率和混响信号频率相同, 将会导致信号频率落在阻带中心, 无法得到有效放大。只有目标运动且引起的多普勒频率大于阻带带宽, 目标方可被检测到[5]。因此, 目标多普勒速度如果未能达到鱼雷自导检测阈值, 将会造成检测不到目标的后果。对此, 针对在一次转角作战方式下目标多普勒速度未能达到鱼雷自导检测阈值的情况, 进行二次转角作战方式的研究显得尤为重要。

因此, 在要求的多普勒速度阈值和给定的目标速度的情况下, 可以求出满足鱼雷自导检测阈值的角度范围, 称之为可攻角, 而不满足要求的角度范围, 称为不可攻角。假设鱼雷自导探测多普勒速度阈值为3 kn, 目标航速分别为6 kn、9 kn和12 kn时, 研究其不可攻角, 如图1所示。在相同的自导探测阈值下, 不同的目标航速会有不同的不可攻角。目标航速越大, 不可攻角越小, 可攻角越大。
图1 多普勒阈值为3 kn时不同目标速度的不可攻角

表1 多普勒阈值为3kn时不同目标速度的最大可攻角
2 声自导鱼雷二次转角射击模型
2.1 一次转角射击模型
图2 一次转角射击模型
形心法是使鱼雷自导扇面重心与目标相遇, 简化求解有利提前角的计算方法[5]。

2.2 二次转角射击模型
声自导鱼雷一次转角射击方法仅考虑到鱼雷与目标相遇时的态势为目标处于鱼雷的自导扇面重心处, 这种射击方法适用于目标舷角在可攻角范围之内。而对于一次转角射击下目标舷角不在可攻范围内时, 目标即使进入鱼雷自导扇面但未达到鱼雷自导探测阈值, 鱼雷也难以发现目标。
针对一次转角射击存在的问题, 提出二次转角的射击方法, 使得鱼雷在攻击目标时进入目标的可攻角范围内。根据上文的可攻角研究, 可见可攻角的取值可在2个范围内。因此文中研究在2种不同可攻角范围内的二次转角射击模型。
2.2.1 鱼雷呈迎击态势的二次转角射击模型

图3 鱼雷呈迎击态势的二次转角射击模型
2.2.2 鱼雷呈追击态势的二次转角射击模型
此模型考虑的是目标进入鱼雷自导扇面时, 目标舷角为钝角, 且取值在可攻角范围内的情况。鱼雷执行二次转角后, 大致呈追击态势追踪目标, 如图4所示。
图4 鱼雷呈追击态势的二次转角射击模型

1) 横轴方向上的方程

2) 纵轴方向上的方程

3) 扇面圆心到重心距离
4) 角度条件


3 射击参数解算
3.1 仿真参数设定
3.2 一次转角射击方式的参数解算
运用形心法求得一次转角射击的有利提前角, 在有利提前角射击下, 求解理想状态下目标在鱼雷自导扇面形心时的目标多普勒速度, 见表2。

表2 一次转角射击模型的参数解算
如表2所示, 在这种战场态势下, 运用一次转角射击的作战方式将会导致目标多普勒速度未达到鱼雷自导检测阈值, 难以检测到目标。此时考虑鱼雷二次转角射击的作战方式显得尤为重要。
3.3 二次转角射击方式的参数解算

4 发现概率计算
4.1 目标不机动的发现概率计算

表3 二次转角射击模型目标速度为6 kn的参数解算

表4 二次转角射击模型目标速度为12 kn的参数解算
对于一次转角射击模型的射击参数解算, 利用形心法求解有利提前角, 通过蒙特卡洛法计算发现概率。可得当目标速度为6 kn和12 kn时, 发现概率分别为0.306, 0.554。对于改进后的鱼雷二次转角射击模型的发现概率如图5所示。
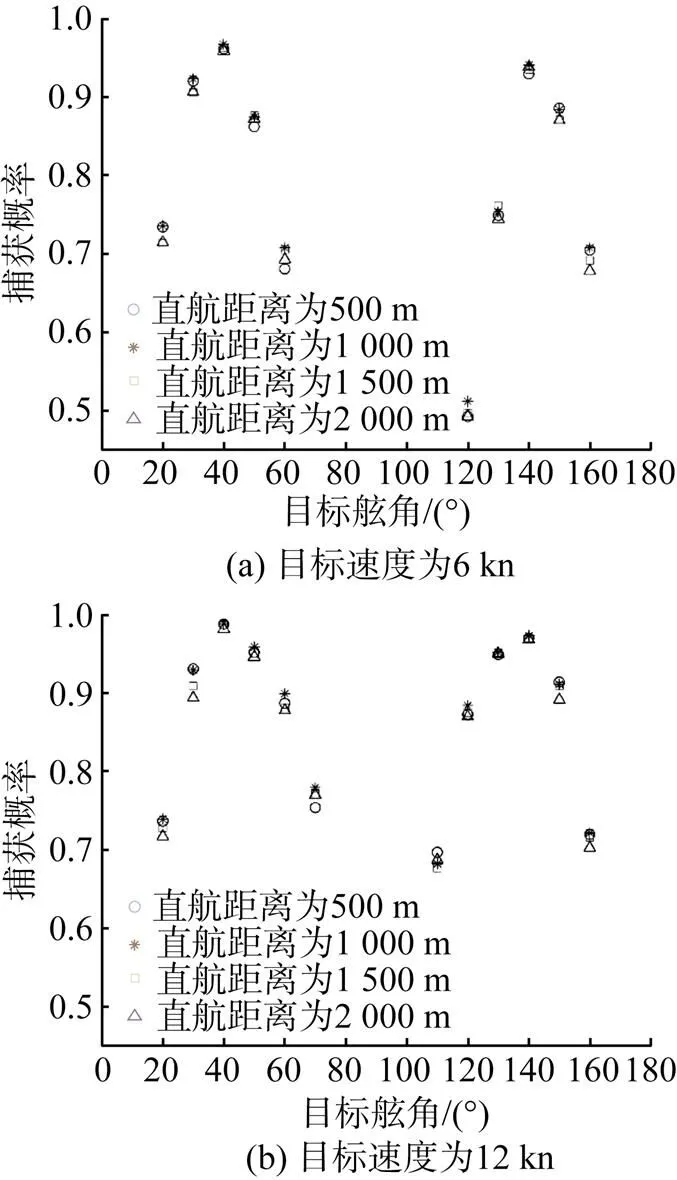
图5 不同的目标舷角和二次转角后不同的直航距离下鱼雷发现概率图
对于二次转角后鱼雷直航距离的选取, 如图5可见, 无论目标速度为6 kn或12 kn, 选取二次转角后直航距离为1 000 m情况下的鱼雷发现概率总体上均高于其他情况下的发现概率, 但总体上二次转角后直航距离的取值对发现概率的影响较小。

4.2 目标机动的发现概率计算
4.2.1 目标机动参数设置
文中引用的机动计算模型[5]为纯模拟结论, 主要为了达到目标转向全过程始终远离鱼雷的目的, 当鱼雷到达预定直航目标相遇点时离目标最远。
1) 机动时刻
2) 转向角

当目标鱼雷报警舷角Q>80°时, 其转向角为

3) 转向方式
假如目标的鱼雷报警舷角在15°~150°之间时, 目标背雷转向。
4) 旋回半径

5) 旋回角速度
4.2.2 发现概率计算

表5 目标不机动和机动情况下的发现概率对比
5 结束语
[1] 刘强, 袁富宇. 声自导鱼雷一次转角射击参数优化[J]. 指挥控制与仿真, 2012, 34(2): 53-57.
Liu Qiang, Yuan Fu-yu. Optimization of Firing Parameters with One-time Rotating Angle of Acoustic Homing Torpedo[J]. Command Control & Simulation, 2012, 34(2): 53-57.
[2] 孙春华, 张会, 李长文. 声自导鱼雷一次转角射击参数优化[J]. 舰船电子工程, 2011, 31(8): 40-42,51.
Sun Chun-hua, Zhang Hui, Li Chang-wen. Optimization of Lead Angle for Acoustic Homing Torpedo[J]. Ship Electronic Engineering, 2011, 31(8): 40-42, 51.
[3] 张静远, 王鹏. 声自导鱼雷双雷齐射有关技术与战术问题分析[J]. 鱼雷技术, 2013, 21(4): 299-305.
Zhang Jing-yuan, Wang Peng. Technical and Tactical Analysis of Two-Torpedo Salvo for Acoustic Homing Torpedo[J]. Torpedo Technology, 2013, 21(4): 299-305.
[4] 张选东, 代志恒. 声自导鱼雷射击模型优化研究[J]. 指挥控制与仿真, 2010, 32(4): 49-51.
Zhang Xuan-dong, Dai Zhi-heng. Optimization of Firing Model for Acoustic Homing Torpedo[J]. Command Control & Simulation, 2010, 32(4): 49-51.
[5] 张静远. 鱼雷作战使用与作战能力分析[M]. 北京: 国防工业出版社, 2005.
[6] 李明辉. 基于蒙特卡洛法的水下对抗效能推演评估研究[D]. 北京: 中国舰船研究院, 2014.
(责任编辑: 许 妍)
Operational Application Method of Two-time Turning Angle for Acoustic Homing Torpedo
LI Hua, ZHANG Jing-yuan
(College of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
In the case of one-time turning angle operation mode of an acoustic homing torpedo, the Doppler velocity of the target does not reach the threshold of homing detection threshold as the torpedo is meeting the target, which leads to difficulty in detecting the target. This paper analyzes the target Doppler velocity and the torpedo homing detection threshold, then puts forward a two-time turning angle operation mode to satisfy torpedo homing detection, and establishes a model. The detection probabilities of an acoustic homing torpedo in one-time turning angle operation mode and improved two-time turning angle operation mode are solved by Monte Carlo method with consideration of target maneuvering. The results show that the improved two-time turning angle operation mode can improve the detection probability of an acoustic homing torpedo.
acoustic homing torpedo; target Doppler velocity; two-time turning angle; detection probability
TJ630.5; E843
A
2096-3920(2018)04-0342-06
10.11993/j.issn.2096-3920.2018.04.011
李华, 张静远. 声自导鱼雷二次转角作战使用方法[J]. 水下无人系统学报, 2018, 26(4): 342-347.
2018-06-07;
2018-06-29.
李 华(1993-), 男, 在读硕士, 主要研究方向为武器制导与控制技术.
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
文萃报·周二版(2022年24期)2022-06-16 22:04:19
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
发明与创新(2021年39期)2021-11-05 07:15:40
小哥白尼(军事科学)(2021年6期)2021-11-02 05:25:16
智能计算机与应用(2021年5期)2021-10-05 12:45:18
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
计算机测量与控制(2017年6期)2017-07-01 16:23:53
军事体育学报(2016年2期)2016-06-15 20:28:12