三维激光扫描仪在电力铁塔结构提取中的应用
2018-08-30 00:44:14徐旭王红改李谋思
城市勘测 2018年4期
徐旭,王红改,李谋思
(1.武汉大学测绘学院,湖北 武汉 430079; 2.四川电力设计咨询有限责任公司,四川 成都 610041;3.成都市规划信息技术中心,四川 成都 610041; 4.武汉市勘察设计有限公司,湖北 武汉 430000)
1 引 言
随着越来越多电力铁塔的建设与运营,铁塔安全状态受到了广泛关注。提取铁塔运营过程中的结构特征,计算铁塔倾斜度,实现铁塔安全监测是十分重要的问题。现阶段主要利用高精度免棱镜全站仪对铁塔结构进行测量,但该方法测量特征点数据较少,难以全面反映铁塔结构特征,可靠性较低。地面三维激光扫描技术的推广,为铁塔安全监测提供了新的技术手段,它突破了传统的单点测量方法,具有高精度、高效率等优势,能通过海量点云数据获取被测物体表面几乎全部特征信息[1,2]。
梅文胜、李必军分别利用地面三维激光扫描仪进行了精细地形图测绘[3]与建筑物特征提取[4],电力行业谢雄耀等人利用三维激光扫描仪实现了电力杆塔扫描检测[5];刘求龙等人利用三维激光扫描仪点云数据建立了惠泉变电站三维模型[6]。由于电力铁塔结构形式多变,且扫描过程中受外界环境影响粗差点较多,点云后处理困难;针对这些问题,本文利用成都某变电站监测项目铁塔点云数据建立塔身独立坐标系,采用基于铁塔结构几何特征的RANSAC算法提取铁塔结构特征点云,计算铁塔倾斜度,实现了铁塔运营阶段安全监测。
2 地面三维激光扫描仪与塔身独立坐标系
2.1 扫描仪工作原理简介
地面三维激光扫描仪采用仪器内部坐标系,坐标原点为仪器中心,X、Y轴位于横向扫描面内,Z轴垂直于横向扫描面[7]。扫描仪发射激光射向目标点P,激光经反射后由仪器内部接收器接收,通过激光发射和接收时间差T计算目标点到仪器中心距离r,并记录横向扫描角φ和纵向扫描角θ,获取被测点球面坐标P(r,φ,θ),根据扫描仪球面坐标系与直角坐标系转换关系(公式1),得到被测点P的仪器内部空间直角坐标P(X,Y,Z):
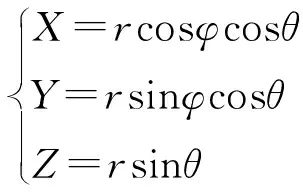
(1)
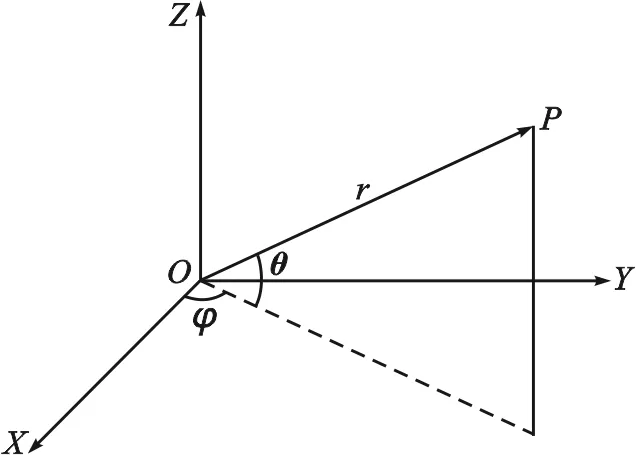
图1 扫描仪内部坐标系
2.2 塔身独立坐标系
地面三维激光扫描仪获取的点云数据采用仪器内部坐标系,本文针对独立设站铁塔扫描点云,为便于后期铁塔结构点云提取、建模分析,利用铁塔点云数据根据铁塔结构几何特征建立塔身独立坐标系。图2为采用Maptek I-Site 8820扫描仪在成都某变电站监测项目中独立设站采集的铁塔点云数据。
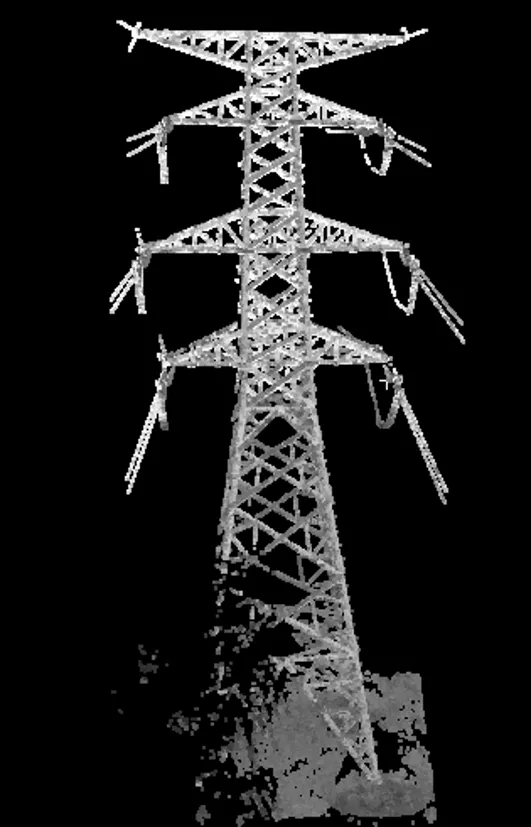
图2 铁塔原始点云数据

图3 建立塔身坐标系流程图

图4 塔身坐标系坐标原点与XY轴
3 RANSAC算法铁塔结构点云提取
原始点云粗差剔除、特征提取一般采用最小二乘法、特征值法,这类方法是通过给定的目标方程,计算出最优模型参数进行特征提取,其对于初始参数与目标方程的设定要求很高,算法不具有稳健性,因此本文在铁塔结构点云提取中采用能从包含异常数据的样本中通过迭代方式自动提取出最优参数模型的随机抽样一致性算法。
3.1 RANSAC算法
随机抽样一致性(Random Sampling Consensus,RANSAC)算法由Fishier和Bolles在1981年提出,该算法原理:对于一个数据量为m的样本S,利用随机最小数据量n求出其参数模型M,例如直线、平面模型中n分别为2和3;选择合适的指标(例如平面点云中为点到平面模型的距离)对样本中其他数据逐个在参数模型M中进行判定,并通过设定的阈值t进行筛选,若小于阈值t,则为“内点”,反之则相反,记录该模型内点个数N。通过在样本S中迭代多次选择最小数据量n,计算不同参数模型M中获取含内点数N最多的模型作为该样本最优参数模型。RANSAC算法通过最少的限定条件,利用点云自身样本数据进行最优参数模型选择,该算法提取平面点云流程如下:
(1)从原始点云集合S中选取任意3个不共线点{P1,P2,P3},计算其初始平面模型Ax+By+Cz+D=0。
(2)遍历点云集合S剩下点到上述初始平面模型的距离:
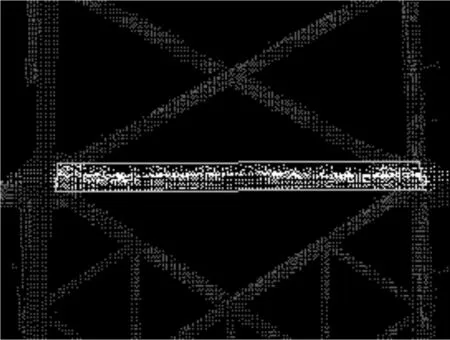
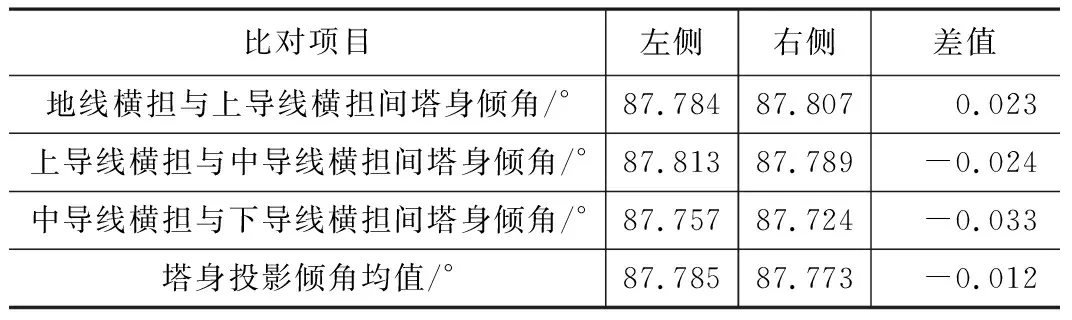
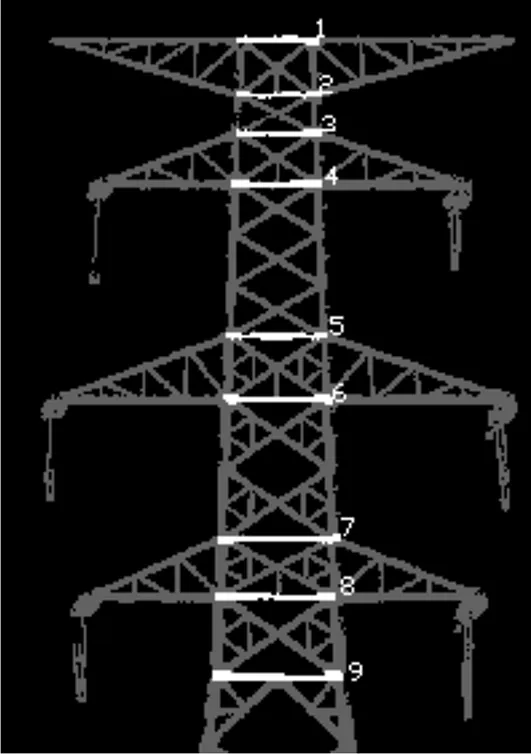
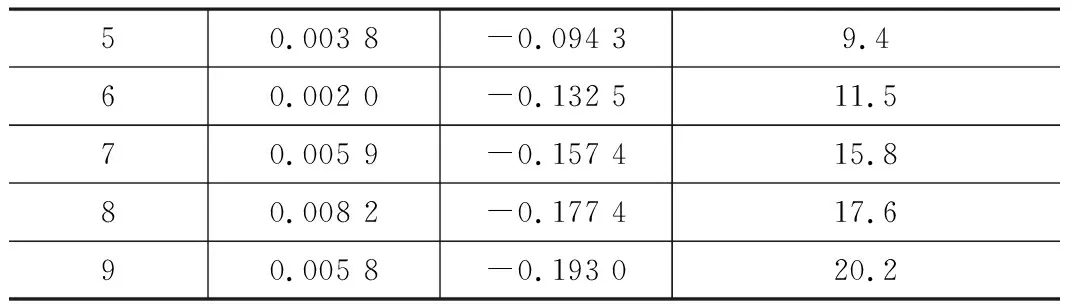
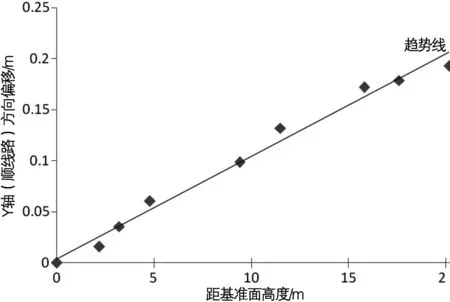
(3)设定合适的阈值t,即平面厚度。当di (4)重复上述(1)~(3)步骤K次,即迭代次数;RANSAC算法中定义K满足公式f=1-(1-εn)K,其中f为至少能获取一个有效参数模型的概率,ε为原始点云集合S中有效点云所占的比例(预估值),n为确定参数模型最小数据量,在平面中值为3。 (5)选择K次迭代后内点个数N值最大的参数模型作为最优平面拟合模型,该参数模型对应的内点即为剔除粗差的平面点云数据。 (2)CP(a)/=1,考虑商群G=G/Φ(P)=P/Φ(P)(〈a〉Φ(P))/Φ(P),则由文献[10]中定理其中l=|P|.进而有 G=P Φ(P)QΦ(P)Qh2··· Φ(P)Qhl.又Φ(P)=CP(a)/=1,顶点集连通且连接P中与Φ(P)相连的顶点,故P∗(G)的连通分支个数为k(P∗(G))=s1(P)-s1(Φ(P))+1. 由上节2.1可知,利用RANSAC算法提取平面点云过程中主要涉及阈值t、置信度f、有效数据比例ε、迭代次数K这4个参数的选择。本文基于铁塔钢梁结构几何特征进行上述参数合理地选取与设定,以获取最优结构平面点云集合。 如图5所示,白色线条区域内点云为铁塔导线横担横梁点云数据,可以看出横梁上边缘点云极不规则,粗差点较多,而靠近下边缘点云排列整齐。铁塔结构中该白色点云部分长约 2.9 m,宽约 0.12 m,根据仪器扫描分辨率与下边缘结构点云可判断每相邻扫描两点间距约为 0.03 m,因此可计算得出该结构横梁有效点云约为500点,而统计白色部分点云个数约为 1 200点,因此有效数据比例ε=0.42,至少能获取一个有效参数模型的置信度f,根据经验公式设为0.99[8];根据f=1-(1-εn)K可计算得出迭代次数K为70次。由于铁塔钢梁结构表面光滑平整,为有效剔除粗差点,设置平面厚度阈值t为 0.01 m。利用上述设定参数通过RANSAC迭代算法提取独立坐标系下导线横担钢梁点云数据,即图6中白色线条区域内点云,该组点云约450点,且排列规则整齐,两点间距离约为 0.03 m,清晰准确地反映了该导线横担钢梁结构特征,验证了利用该改进算法能有效地剔除粗差,提取铁塔点云结构。 图5 导线横担结构点云 图6 基于铁塔结构的RANSAC算法点云提取 通过改进的RANSAC算法剔除铁塔扫描点云粗差,现提取塔身独立坐标系中XZ平面内铁塔结构点云数据,获取该铁塔顺电力线路前进方向各横担、塔身等模型如图7所示: 图7 XZ平面内铁塔模型 对图7模型中部分距离、角度等值进行标注,并从塔身与横担夹角、各横担长度、左右两侧横担差值、左右两侧塔身钢材宽度等进行比较分析,结果如表1、表2所示。 塔身模型距离比对 表1 塔身模型倾角比对 表2 通过表1、表2结果可以得到以下信息:①通过建立塔身坐标系、RANSAC算法结构点云提取、点云建模等流程获取的铁塔模型具有高精度与可靠性,铁塔左右两侧同一比对项目差值达到毫米级;②该型转角塔左右两侧横担的差值约为 34 cm,地线横担长为 14.6 m,判断为2号转角塔;③该铁塔塔身投影倾角约为87.8°,与该类型铁塔设计倾角相符。通过与该型铁塔初始设计参数比对,验证了该铁塔建模成果的准确性。 倾斜度检测是铁塔结构检测的一项重要指标,通过塔身中心轴的铅垂度判断铁塔倾斜值。目前常用有铅锤法、经纬仪法、平面镜法,同时一些重要线路上建立了自动化倾斜监测装置[9]。本文利用地面三维激光扫描获取的铁塔点云数据,计算该铁塔倾斜度。图8为该铁塔地线横担塔架切片在塔身坐标系XY平面内的点云,利用塔架结构点云切片求出该投影面几何中心(即图8中标注几何中心),作为该铁塔中心轴线上一点。 图8 塔身切片几何中心 由于铁塔横担结构特征清晰明显,点云数据量大,因此从上至下选取图9中白色部分九组截面数据在XY投影面内求取铁塔塔架中心坐标作为铁塔轴线,结果如表3所示。 图9 白色截面点云为待分析点云 塔架中心轴坐标 表3 续表3 由于铁塔倾斜实际是从下至上逐步增大,为便于分析,设定第9组坐标为基准点,所在的XY平面为基准面。绘制如图10、图11所示。 图10 塔身坐标系中X轴方向偏移趋势 图11 塔身坐标系中Y轴(顺电力线路方向)偏移趋势 通过表3和图10、图11可以得出: (1)该铁塔中心轴在塔身坐标系X轴上最大偏移约为 8 mm,变化趋势不明显; (2)在Y轴(顺电力线路前进方向)上随着距离基准面高度的增加,偏移值加大,偏移趋势约呈一定的线性关系(图11中的黑色趋势线)。 根据电力杆塔倾斜度计算公式: G=E/H×100% (2) 其中G为倾斜度,E为偏移值,H为距离基础高度。该铁塔高 40 m,计算该9组截面倾斜度。得出地线横担处(即铁塔顶端)的倾斜度最大,约为0.48%,与表4正常杆塔倾斜允许最大值1%差值较大。得出该铁塔顺电力线路方向倾斜度处于阈值范围内,处于安全运营状态。 正常杆塔倾斜允许最大值 表4 作为新一代测绘仪器,地面三维激光扫描仪已逐步应用于各个领域,该类仪器的非接触式、海量点云、全景获取等优势十分明显。本文利用地面三维激光扫描仪对成都某变电站附近铁塔扫描观测,主要做了如下工作: (1)利用铁塔点云结构明显的几何特征建立了塔身独立坐标系,将任意设站扫描获取的内部坐标系转换为基于塔身结构的独立坐标系,便于后期铁塔结构提取分析。 (2)采用RANSAC算法处理原始点云,开创性地基于铁塔结构特征选定RANSAC算法参数,进行铁塔扫描点云粗差剔除、结构提取。 (3)通过铁塔点云建模与精度分析肯定了三维激光扫描仪的扫描精度与可靠性,并获取了铁塔运营阶段中的各结构状态参数。 (4)利用扫描点云对铁塔进行倾斜度检测,定量确定了铁塔处于安全运营状态。在今后工作中还需要进一步研究铁塔倾斜原理与倾斜规律,定量定性实现铁塔安全监测。3.2 基于铁塔结构的RANSAC算法经验参数选取与点云提取

4 点云建模与精度分析


5 铁塔倾斜度检测




6 结 语
猜你喜欢
港口装卸(2022年4期)2022-08-31 00:40:28
口腔颌面修复学杂志(2020年5期)2021-01-06 08:18:46
孩子(2020年8期)2020-08-13 06:52:30
建筑机械(2018年4期)2018-06-04 06:35:20
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
现代营销·经营版(2013年5期)2013-05-14 14:55:04
中国石油和化工标准与质量(2013年7期)2013-04-29 23:13:53
警察技术(2013年1期)2013-03-20 14:11:22
河南冶金(2012年1期)2012-12-07 05:28:36