
基于DMD的彩色图像偏振态获取方法
2018-08-30 08:52方刚赵海丽刘鹏王晓曼
长春理工大学学报(自然科学版) 2018年4期
方刚,赵海丽,刘鹏,王晓曼
(1.长春理工大学 电子信息工程学院,长春 130022;2.长春理工大学 空地激光通信技术国防重点学科实验室,长春 130022)
近年来随着人们对偏振光的深入了解,对偏振光的利用也越来越多。例如利用物体不同的偏振特性来处理雾霾天气里汽车行驶和船舶靠岸等问题;利用不同结构物体的不同偏振特性来识别坏死的细胞或癌变的细胞等。因此说偏振光已经逐步走入人们的生活中,并且已经扮演越来越重要的角色。然而,现有成果多是建立在灰度图像的基础上,对于彩色图像偏振态的探索少之又少。限制彩色图像偏振态研究的瓶颈主要是获取圆偏振态需要根据光波的波长搭建不同的光路,如果真的为了探索彩色图像偏振特性而斥巨资搭建庞大的光学系统,这显然有些不切实际。
针对这一难题,文章提出了一种基于数字微镜器件(Digital Micromirror Device,DMD)的彩色图像偏振态获取方法,利用计算机图像生成器对图像进行彩色分解成RGB三色图像,然后通过三块DMD分别对三种颜色的图像进行投放,经光学系统最后生成含有偏振态的彩色图像,从而大大提高图像的辨识度。
1 光的偏振态
线偏振光是自然光经过偏振片(起偏片)处理后产生的一种光。圆偏振光是由两束传播方向相同、振动平面相互正交、光强大小相同、波长相同、且相位相差1/4波长的线偏振光矢量合成的[1],其具体合成方式如图1所示。

图1 圆偏振态合成方式
圆偏振光是由偏振片和1/4波片共同作用产生的[2]。当两束光传播方向相同、振动平面相互正交、光强大小相同、波长相同,但相位差不为1/4波长时(相位相同或相差2nπ的光为同一束光),则可以获取椭圆偏振光。
因为材质的种类、颜色、表面光滑程度等都会对光的偏振态起着至关重要的影响,所以根据反射回来的偏振光的特性可以区分不同的物体。并且偏振光具有穿云破雾的功能,可以消除雾霾、烟尘、火光等环境因素的影响。
2 彩色图像的显示
如表1所示。通常人眼可以感知的可见光波长在380~760nm之间,人眼之所以能够看到五颜六色的景象是因为人眼可以对不同波长的光进行分类识别。由于人眼对可见光的分辨是依靠眼睛内部三种不同锥体细胞对所受感光刺激的峰值判断的结果,任何几种色光,只要它能使一组锥体细胞产生同样比例的刺激值,就会被认为是同一种颜色。这就是人眼的同色异谱现象,即两种被人眼看上去是相同颜色的色光,它们的光谱成份不一定是一样的[4]。

表1 颜色对应的波长段
基于这个原理,1861年苏格兰物理学家马克斯韦尔提出了基于三原色的加色法,即通过调配红光、绿光、蓝光(RGB)不同的比例来实现多色彩的显示。
3 基于DMD的投影显示
基于DMD的投影显示又称为数字光处理显示(Digital Light Processing,DLP),它是通过脉冲宽度调制(PWM)下的可变脉冲波形,控制DMD工作进而实现图像显示。
3.1 数字微镜器件(DMD)
DMD是在1987年由美国德州仪器公司发明的一种反射型器件,其输入为脉冲宽度可变的电信号,输出为光信号[5]。如图2所示DMD有两种工作方式:+10°(或12°)和-10°(或-12°),当投影光源以特定的角度照射镜面时,如果DMD处于+10°为开态,光经过镜面反射会进入投影区域,照亮投影区域,成像的灰度加一;当DMD处于-10°为关态,光经过镜面反射后不会进入投影区域,成像的灰度不变。

图2 DMD微镜两种工作状态
图像上的每个像素点都有与之相对应的微镜片,各个微镜片共同作用,最终完成一幅完整图像的成像。
3.2 基于DMD的投影显示技术
基于DMD的投影显示技术结构主要由计算机图像生成器、DLP视频处理电路、DMD驱动电路、DMD阵列、黑体、照明光学系统和准直投影光学系统构成。由计算机生成动态图像信号然后经DLP视频处理电路对信号进行处理后,驱动DMD控制微镜阵列工作;而黑体作为发射光源经照明光学系统后形成均匀的照明区域;光经半反半透镜反射到微镜阵列,在驱动电路的控制下对光进行有条件的筛选后,部分光透过半反半透镜经准直投影光学系统投放出来。

图3 基于DMD的投影显示技术
4 系统设计
结合数字光处理显示技术和系统需求,总结出以下设计方案(图4):系统包含电子学部分和光学部分。从DMD阵列划分前半部分为电子学部分,后半部分为光学部分。电子学负责图像信号的处理、编解码、驱动控制、复位操作等;光学部分负责加入偏振信息、合束等。
4.1 电子学系统设计
如图5所示,系统设计的主体为三块DMD,对应三个FPGA。参考数字光处理显示技术,该系统通过计算机图像生成器将图像信息中红、绿、蓝光信息分别传输给三块DMD;并且因为系统采用三块DMD对一帧图像成像的方式,所以必须设计同步处理控制,因此引入ARM作为同步控制器。其中ARM与PC通过usart通信,TXD和RXD为数据输出和输入口。PC与DMD主控FPGA通过USB通信,采用通用可编程接口方式(GPIF),其中IFCLK为时钟信号,CTL为控制线,FD为数据线。PC通过USB将数据分别传送给三块FPGA,FPGA控制DMD驱动电路完成系统工作,当完成一帧图像的成像后,DMD会返回一个高电平的状态信号给FP⁃GA,ARM通过外部中断INT0口接收三块FPGA发送的完成状态标识信号后通过串口与PC通信,告知上位机前一帧图像已经完成成像任务,可以发送下一帧数据。

图4 总体设计方案

图5 电子学系统总体模型
4.1.1 DMD驱动设计
如图6所示,DMD驱动电路由DDC4100和两块DAD2000构成[6]。FPGA通过对DIN_A/B这两个16b差分信号对DDC4100总线进行控制,DCK⁃IN_A/B为两个总线的输出数据时钟,为了确保总线输出数据的正确性,通过DVALID_A/B进行校验,通过ROW输出行地址信息和行数据信息,通过BLK输出块地址信息和块数据信息,通过RST_AC⁃TIVE对微镜执行复位操作,通过INT_ACTIVE对DDC4100进行复位操作,当系统完成初始化或系统完成一帧图像传输工作后通过VLED返回状态标识。DOUT_A/B为LVDSDDR输出到DMD的数据总线,SCTRL_A/B为LVDSDDR的输出数据控制,DCLKOUTL_A/B为LVDSDDR输出数据时钟。

图6 DMD驱动模型
其具体操作为:FPGA在获取DDC4100总线执行权后发送图像数据给DDC4100;DDC4100在接收信息后返还状态信息给FPGA,并将图像信息转换成DMD微镜阵列可以识别的数据和控制指令,根据DAD2000提供的复位信息和时序信息等进行工作。
4.1.2 SDRAM接口设计模型
如图7所示,通过FPGA例化一个FIFO对图像信息进行缓存,由于SDRAM的读操作和写操作是以2个字节为单位的(16bit),因此可以设定当写出(writeout)FIFO存储容量超过32个字节(512/2bit,DMD数据块传输数据包为512bit)时,发出读信号,将数据写到SDRAM中;与之相反,当读入(readin)FIFO存储容量不足256bit时,发出读数据请求,以此读取图像数据。工作在这种半空状态可以实现数据的不间断传输,提高工作效率,同时也便于操作。图中的“其他模块”包括PLL锁相环和复位处理模块等。
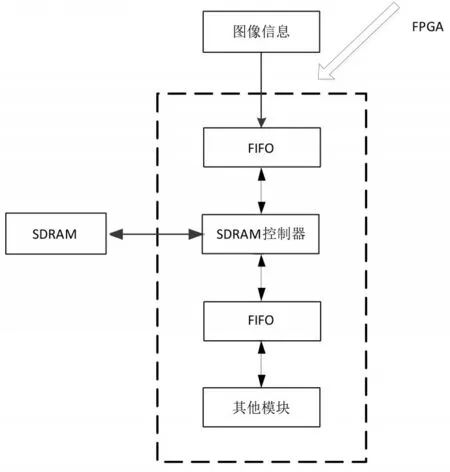
图7 SDRAM接口设计
图8为SDRAM接口模型,其中clk和Cke为时钟信号输入端口和控制端口,Cs为片选端口,可以禁止或使能Ck、Cke和Dqm外所有的输入信号,Dqm为屏蔽输入输出操作端口,SDRAM官方规定,在读取数据时,Dqm发出两个时钟周期后生效,而当写入数据时,Dqm与写入命令一样是立即生效的,Dq为数据输入输出端口,We为写使能端口,其他为地址控制、选址、锁存端口。

图8 SDRAM接口模型
4.2 光学系统设计
光学系统的引入有三个作用:(1)通过滤光片将自然光中的有用光透过、无用光滤除,为了得到RGB三种不同颜色光,在黑体和光学照明系统之间加入了红、绿、蓝三种不同颜色的滤光片;(2)通过起偏片和1/4波片将自然光变成椭圆(圆)偏振光(可以通过改变波片与光轴的夹角改变椭圆形态),经过DMD的微镜阵列选择性投影后的光再经过起偏片和1/4波片(图4中P1、P2、P3)共同作用后的光将含有偏振信息;(3)最后通过合束器进行合束,形成一幅含有偏振信息的彩色图像。
因为系统中引入了1/4波片,所以必须分别对不同波长的光进行处理,才可以得到椭圆偏振信息,每一路光路中1/4波片的参数需要与该路滤光片参数相匹配,这就是这个系统必须采用三块DMD分三个光路合成一幅图像的原因。
值得注意的是,通过滤光片能量衰减为90%左右,且起偏片对光的衰减为50%,而透射率好的波片对光强影响较小(透过率高于80%),所以在光学照明系统中需要加入对光强放大20倍的装置以保障图像亮度的准确性。
5 MATLAB仿真
这个系统设计主要为了将灰度图像转化成含有偏振信息的彩色图像,从而提高图像的辨识度,利用MATLAB仿真出预期的结果。

图9 仿真结果
图9中(a)为样本图像,(b)为MATLAB经伪彩色处理和边缘轮廓提取处理后的图像。伪彩色处理用来仿真系统中RGB三色合成彩色图像的部分,将灰度图像转化成彩色图像;边缘轮廓提取处理用来仿真系统中光学系统获取偏振态的部分,将普通可见光图像转变成偏振图像。对比两幅图像,可以明显发现彩色图像(b)的辨识度比灰度图像(a)高,图像中各个物体更加分明。如彩色图像b方框部分所示,在灰度图像中,人眼很难分清乌云和建筑物,而彩色图像可以赋予它们不同的颜色来区分不同的物体,现实生活中树木是绿色的,绿色物体的灰度图像为灰色,而乌云是灰色的,灰度图像也是灰色的,这反映到灰度图像难以区分,而彩色图像将很明显区分两者的不同。并且在彩色图像上加入偏振信息后人眼很容易看清楚各个物体的轮廓。同样对比彩色图像b中方框部分,可以发现树木边缘与远处建筑物区分的很明显,而灰度图像树木边缘完全与更远方建筑物混为一体,模糊不清。
6 结论
由于MATLAB的局限性,伪彩色方法仿真出来的彩色图像真实性较差,但本系统采用基于DMD器件的彩色图像偏振态获取方法,先利用计算机图像生成器对图像进行彩色分解形成RGB三色图像,然后通过三块DMD器件分别对三种颜色的图像进行投放,最后经由光学系统合成含有偏振态的彩色图像,就能够重现场景的真实颜色,因此不存在MATLAB仿真中乌云为红色的情况,避免了MATLAB真实性不足的缺点。
综上所述,系统设计的基于DMD的彩色图像偏振态获取方法是可行的,利用DMD的完美再现真实场景的功能,再结合偏振信息,就能够有效的祛除图像中模糊场景,提高图像中物体边缘轮廓的辨识度,进一步提高整体图像的辨识度。该方法可以应用于卫星图像物体识别、复杂战场目标识别等多个领域,具有重要的研究意义。
猜你喜欢
物理学报(2022年23期)2022-12-14
中国惯性技术学报(2020年2期)2020-07-24
空间电子技术(2020年5期)2020-03-11
成都信息工程大学学报(2019年4期)2019-11-04
电子制作(2019年16期)2019-09-27
电子制作(2019年12期)2019-07-16
智能城市(2018年7期)2018-07-10
现代职业教育·中职中专(2018年11期)2018-06-11
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年3期)2016-11-07
