
高原雾天高速公路安全影响及其最高限速研究*
2018-08-29 10:24:22胡立伟佘天毅李林育
武汉理工大学学报(交通科学与工程版) 2018年4期
胡立伟 王 淼 佘天毅 李林育
(昆明理工大学交通工程学院 昆明 650500)
0 引 言
雾天对行车安全造成极大的影响,高速公路上约有25%的交通事故是由于雾等恶劣天气造成的,雾天已成为导致高速公路恶性交通事故的第一杀手.据统计,在沪宁高速公路上,雾天发生交通事故的概率是正常天气的10倍,大约1/4的事故是因浓雾影响造成的[1]。尤其在高原地区,地形复杂,气候类型多样,导致雾天频发,交通事故后果更加严重.
关于雾天高速公路行车安全,国内外学者进行了诸多研究.Kolisetty等[2]发现可变信息标志牌可以降低驾驶人在雾天的行驶速度;Qi等[3]通过对空气质量模型和能见度模型的研究,建立了解析模型;Muellert等[4]认为,雾天环境中驾驶员经验、能见度等级对驾驶人速度选择和风险规避有影响;Ding等[5]利用交通流元胞自动机模型得到的随机慢化概率来反映驾驶员驾驶行为,所提出的慢化概率考虑了驾驶员的记忆特点;张续光等[6]在分析雾天能见度对高速公路交通影响的基础上,进一步对雾天形成气象条件的时间演变进行的主成分与相关性分析,建立了雾天出现的预测模型;张卫华等[7]采用Pearson相关系数法和结构方程模型建模方法,研究低能见度环境中危险驾驶行为与驾驶能力描述性变量间的关系,危险感知能力是影响错误行为发生的主要因素;程国柱[8]通过分析雾对高速公路行车安全的影响机理,得到基于安全距离的最高限速值的计算公式,并提出了相应的高速公路车速限制标准建议;廖海峰等[9]针对低能见度及路面附着系数较小的情况,研究了安全车速的限定,并分别计算了基于停车视距和基于标志认知距离的限速值;叶俊明等[10]通过分析不良天气与事故的关系,提出了天气对事故影响强度的方法,建立了不同天气条件下的安全行驶模型,并给出了安全行驶限速值;秦丽辉等[11]通过对高速公路分析不同车型及车道的限速特点,提出了不同车道情况下,分车型与分车道限速方法相结合的限速建议值;张乐飞[12]引入速度调解率系数对宏观交通流模型进行修正,建立可变限速模型,对高速公路实施分区间可变限速控制.
文中基于云南省雾天高速公路事故分布特征,考虑驾驶人雾天识别距离、感知速度的变化规律,以路面附着系数、纵坡坡度、能见度作为安全影响因素,对高原雾天高速公路最高车速限制展开研究.
1 高原雾天对高速公路运行影响分析
高原特殊的地形地质特点,海拔变化大,导致雾天及雾团频发.雾天行驶时,驾驶人会感觉车外景物移动速度变慢;在由清晰环境切换到“雾中”时,人对速度的感知会受到干扰,不由自主的加速.因此,雾对驾驶行为、心理和生理、道路条件等均有不同程度的影响.
1) 雾天对驾驶员的影响 雾天对驾驶员的直接影响为车辆减速行驶,而间接的表现是在驾驶员对车距估计及目标识别距离上.能见度的降低,导致车辆运行所需参照系模糊或参照物消失.因此,驾驶员根据感知雾浓度来控制车距大小.然而,雾从产生到消散的持续过渡过程,易使驾驶员产生距离错觉,导致安全距离过小而产生追尾事故.
2) 雾天对能见度的影响 雾天首要考虑的就是能见度,能见度低,驾驶员可视范围减少,往往会导致前方紧急停车时,反应不及时,做出错误判断,造成交通事故.当能见度小于50 m时,驾驶员往往会高估自身及其他车辆的行驶速度;能见度大于50 m时,驾驶员又会低估自身及其他车辆的行驶速度,速度感知的不准确,会导致操作失误.
3) 雾天对路面附着系数的影响 雾天环境下,路面潮湿,附着系数急剧下降,相比于干燥路面,潮湿路面的附着系数达不到其一半,事故发生的几率大大提升.国内外研究给出了不同路面状态下的附着系数,虽没有给出雾天的路面附着系数,但雾天路面近似于降雨开始的状态,因此,雾天路面附着系数可取0.4~0.6.车辆在雾天行驶时,驾驶员容易忽视路面湿滑的状态,仍以较高速度行驶,当需要紧急制动时,由于附着系数的下降增加了制动距离,极易发生追尾事故,雾天能见度与路面附着系数的关系见图1.
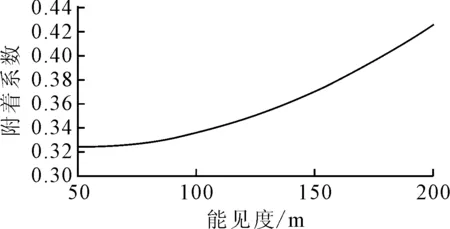
图1 能见度与附着系数的关系
由图1可知,随着能见度的增大,路面附着系数呈现出整体上升的趋势,且趋势趋于加快,呈单调变化,建立相应的关系模型,进行回归分析,得到雾天能见度与路面附着系数关系模型最优的表达形式为
y=0.010 7x2-0.019 4x+0.332 5
(1)
式中:y为路面附着系数;x为雾天能见度.
2 高原雾天交通事故分布特征
2.1 高速公路事故时间及地区分布
基于云南省地形分布以及地质气象特点,针对高速公路事故数据,提取雾天事故数据进行统计分析,得到月分布比例见图2,事故地点数据分布见表1.
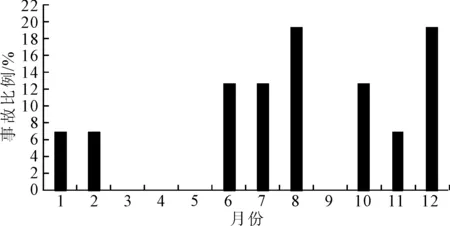
图2 高速公路交通事故月分布比例图
由图2可知,道路事故主要集中在6~12月,占到事故数据的90%左右.此时,云南省主要处在雨季,降雨量剧增,加上高原季风的出现,往往会造成近地面的水汽增长,对雾天的形成奠定了基础.
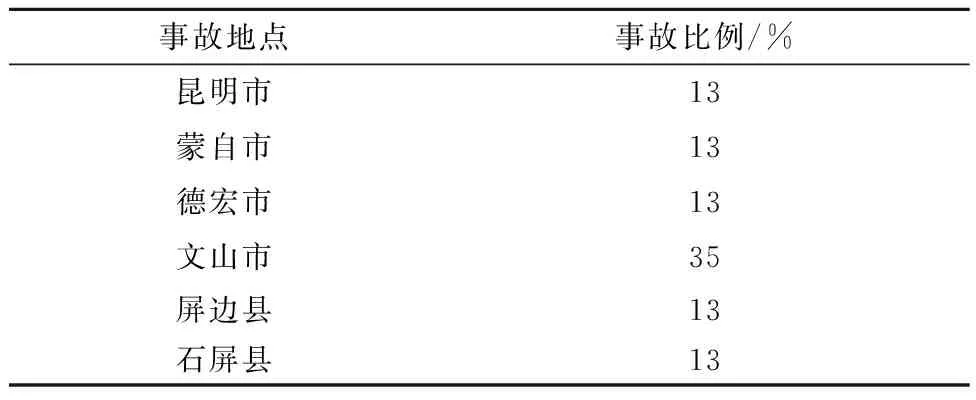
表1 高速公路交通事故发生地点分布比例
由表1可知,事故发生地均位于云南省东南部,地处低纬度亚热带高原型湿润季风气候区,具有独特的高原立体气候特征,降雨量大且集中,相对湿度达到75%,暖湿气流交汇,极易形成雾.
2.2 高速公路事故车型及类型分布
云南省高速公路情况复杂,通过对雾天事故数据统计得到事故车型及类型分布比例见表2~3.

表2 高速公路交通事故车型分布比例

表3 高速公路交通事故类型分布比例
由表2可知,事故车型以货车和摩托车为主.由于货车驾驶操作复杂,且高速公路存在许多特殊路段,频繁制动使得车辆的制动性能降低,甚至出现制动失效.至于摩托车,一方面由于地形限制,保有量较大;另一方面由于其体积小、速度快、自由行驶率高,事故发生率大大提高.
由表3可知,事故类型以尾随相撞为主.主要是雾天能见度降低,驾驶员感知速度的能力下降;路面附着系数降低,导致制动距离增大.当遇到前方车辆或障碍物时,制动不及时或者制动距离不够,往往会造成尾随相撞.
综上所述,云南省高原雾天的形成具有明显的地域性特征.由事故类型还可以看出,雾对能见度影响极其严重,加之高原地区道路线性复杂,低能见度下,可视距离减小,事故几率大大增加.
3 驾驶人识别距离及感知速度分析
3.1 驾驶人雾天识别距离变化规律
1) 识别距离与速度的关系 雾天条件下,随着能见度增加,识别距离增加,且能见度越大,影响越小;随着速度的增大,参照物更迭加快,导致驾驶人的识别距离呈现出整体下降趋势,并且识别距离由分散趋于集中.
2) 识别距离与纵坡坡度的关系 驾驶人雾天识别距离随着纵坡度绝对值的增大,驾驶人雾天识别距离整体呈逐渐减小的趋势,纵坡度为负时识别距离下降比纵坡度为正时下降更显著.
3.2 基于能见度的识别距离影响修正
雾天能见度降低的主要原因是被观测物与背景的对比度降低,驾驶员在雾天行车过程中,一方面雾使得外界物体与环境的对比度减小;另一方面,随着车速的提高,动视力降低,人眼的对比感阀会増大.由下式可知,雾天驾驶员的动态可视距离将比静止时更低.基于能见度或可视距离的修正识别距离计算公式为
(2)
式中:r为形成雾的水滴的半径,m;N为雾中水滴的微颗粒数,个/m3;C为被观测物与背景的对比度;ε为人眼的对比感阈;f为人眼不能再分辨出目标物时的对比度,为识别距离修正系数.
研究表明,驾驶员的动视力随相对速度的提高而降低,一般情况下动视力要比静视力低10%~40%[13].针对不同能见度的高速公路计算安全车速与修正安全车速的影响修正系数见表4.
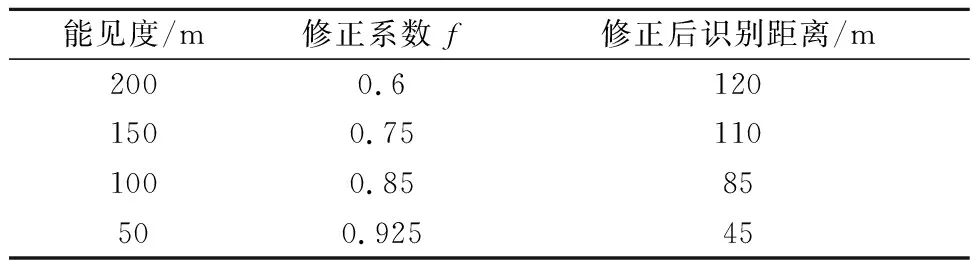
表4 雾天识别距离影响修正
4 理论限速值的确定
4.1 制动过程分析
雾天环境下,车辆制动过程见图3.

图3 车辆安全行驶制动示意图
识别行驶时间t1为制动反应时间,包括驾驶员发现、识别危险并做出制动决定及将脚从加速踏板向制动踏板移动的时间.采取制动后,首先是制动力上升时间t2;其次为全制动时间t3,即制动踏板力及制动力假定为常数,故减速度a也不变.该制动过程简化见图4,将t2时间内的制动减速度变化简化为线性变化,制动减速度达到最大值并保持不变,直至制动过程结束.车辆安全行驶制动受力分析见图5,因道路纵坡角α一般较小,可近似的认为cosα等于1,sin α等于坡度μ.
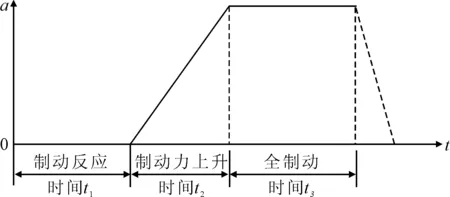
图4 车辆安全制动模型图

图5 车辆安全行驶制动受力分析图
4.2 制动距离模型分析
1) 制动反应行驶距离 反应时间μ行驶距离:

(3)
式中:L1为行驶的距离,m;v为初速度,km/h,t1为反应时间,根据文献[14]取2.5 s.
2) 制动力上升行驶距离 制动力的上升t2时间段内任意时刻的制动减速度为
(4)
则t2时间段内任意时刻的速度为
(5)
制动力上升的过程中,车辆行驶的距离为
(6)
式中:a2为制动力上升内的制动减速度,m/s2;a为制动力稳定后的制动减速度,m/s2;t2为制动力上升时间,根据Bruckhard的研究结果,取0.2 s.
3) 制动力稳定行驶距离 随着制动力达到最大值,t3时间段内的制动减速度为恒定值,此时段内的初始速度为
(7)
则t3时间段内任意时刻的速度为(te为t3时间段内的任意时刻)
(8)
车辆t3时间段内以最大制动减速度a将速度从vs降低至0,车辆行驶的距离为
(9)
制动距离L2为
(10)
制动距离与速度的关系为
(11)
通过对制动过程分析发现,路面附着系数及能见度是影响道路行车安全的关键因素.雾天路面状态属于潮湿类型,根据用于计算潮湿路面车辆停车距离的资料,得速度与路面附着系数关系式为[15]
v=f(i)=
(12)
式中:v为初速度,km/h;i为路面附着系数.
汽车在制动过程中的最大制动减速度为
a=-g(icosα-sinα)=g(μ-i)
(13)
为了简化计算,令
96.13,B=a=-g(icosα-sinα)=
则式(11)可化为
Li=L1+L2=
(14)
式中:Li为能见距离,m;a为道路纵坡角度;i为路面附着系数;μ为纵坡度.
保证行驶车辆与前方障碍物或车辆不会发生碰撞:
Li≥L1+L2
(15)
式(15)是最不利的情况,故应以式(14)作为约束条件.
综上,雾天高速公路最高限速模型为
(16)
式中:v为雾天高速公路理论最高限速修正值。
5 限速模型分析
由于雾天气象的特性,导致对于能见度的监测结果并不是十分精确,因此,国内外在雾区限速中给出的都是能见度范围所对应的限速值.本模型在考虑最不利情况下制定,预留了足够的安全空间,针对每个能见度范围制定限速值时便选取此能见度范围对应的安全允许速度值的上限为限速值.例如,当能见度范围为150~200 m时,所对应的最大安全允许速度为能见度为200 m时的速度值.此外,为方便高速公路雾天气象条件下限速的标定,合理制定建议限速方案,安全限速值在小范围内向下进行取整修正.道路安全法规规定当能见度低于50 m时,行驶速度不得高于20 km/h,故选取20 km/h作为能见度0~50 m时对应的限速值,各能见度范围对应的限速值见表5.
由表5可知,不同坡度下,修正速度变化趋势相同,且随着能见度和附着系数的减小,变化趋势增大.特别能见度在50~100m时,修正速度变化趋势显著;能见度低于50m以下时,则趋于平缓.出于安全考虑,表5中取能见度范围的下限计算理论安全车速,鉴于理论计算过程中各参数取值均偏于保守,且计算存在一定误差,考虑到实际可操作性,小范围内向下修正.AASHTO视距模型和NCHRP视距模型限速值及修正模型限速值对比见表6.

表5 限速模型计算安全车速与修正安全车速
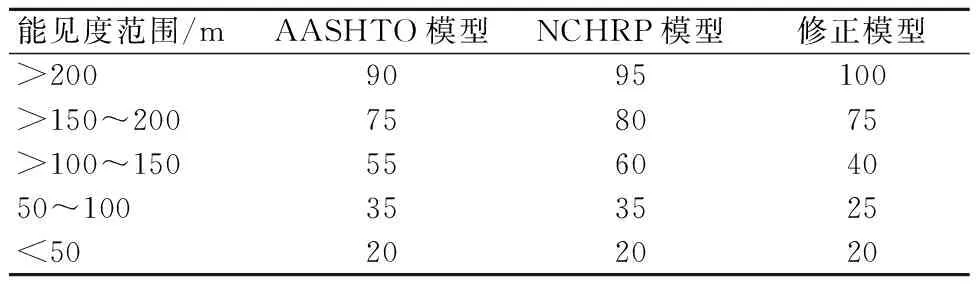
表6 不同能见度范围下不同模型的限速值 km/h
对于NCHRP模型和AASHTO模型考虑影响因素的选择上,存在两点不同之处.首先,制动距离的选择上,NCHRP模型要大于AASHTO模型,更加符合雾天制动停车的实际情况;其次,在对于识别前方障碍物的选择上,NCHRP模型假定障碍物为静止的汽车,而AASHTO模型假定障碍物为路面固定物,在规定同一视线高度上辨认前方障碍物时,由于不同能见度下,行车速度存在一定差异,人眼观察的区域范围也存在一定的偏差,视认性上存在较大的差距,导致制动反应时间有一定的偏差.因此,在比较分析NCHRP模型和AASHTO模型影响因素的选择上,NCHRP模型所得限速值更加符合实际道路上的制动停车情况.
通过对比发现,能见度较低(<50 m)时,AASHTO模型的结果与NCHRP模型相当,略高于修正模型.随着能见度的增加,修正模型结果依然小于AASHTO和NCHRP模型,差值减小,在能见度为200 m时,差值达5 km/h.再次,在AASHTO和NCHRP两种模型中,反应时间取值保守,在计算中采用的附着系数也偏小,所得结果偏于保守.当能见度相对较好(>200 m)时,驾驶员的期望车距,即实际保持的车距远小于200 m.因此,需以计算结果为基础,寻找车速与车距之间的平衡点,在实际运用中对车速控制标准进行调整,保证安全行车的情况下得出雾天建议限速见表7.

表7 雾天建议限速值
6 结 束 语
通过对云南省雾天高速公路事故数据进行分析,发现高原雾天高速公路事故具有明显的时空分布特征及事故车型、类型分布特征.通过对制动过程进行分析,采用运动学原理对汽车的制动距离重新推导,得出了雾天高速公路限速模型.基于该模型,对不同雾天能见度下的安全车速进行分析与计算,给出了不同路面附着系数和能见度下的安全车速及安全间距,并加以修正,以保证行车安全. 对于安全车速分析过程中,还存在一定的不足.应针对制动停车距离及停车视距进行细化分析,考虑道路纵向附着系数以及轮胎横向滑移因素等的影响,制定具体路段限速,结合安全管制措施并进行有效性评价.
猜你喜欢
阅读(科学探秘)(2021年10期)2021-03-08 10:16:50
Advances in Meteorological Science and Technology(2019年6期)2019-12-30 11:45:42
成都信息工程大学学报(2018年1期)2018-05-31 08:40:27
中国交通信息化(2016年9期)2016-06-06 07:42:10
中国交通信息化(2016年6期)2016-06-06 07:11:30
海洋气象学报(2016年3期)2016-02-28 14:27:42
气象研究与应用(2016年4期)2016-02-27 12:23:16
交通科学与工程(2015年1期)2015-12-23 11:08:15
小说月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
