视准线小角度法监测精度分析
2018-08-28 08:34:02伏仲明濮久武
大坝与安全 2018年3期
伏仲明,濮久武
(1.黑龙江大学水利电力学院,黑龙江哈尔滨,150080;2.浙江华电乌溪江水力发电有限公司,浙江衢州,324000)
1 概述
水平位移监测常用的方法有视准线法、极坐标法、交会法、导线法、边角网法、地面摄影测量法、GNSS测量法等大地测量法和垂线法、引张线法、激光准直法、多点位移计法、基岩变位计法、测斜仪观测法等机电量测法。其中直线型大坝的水平位移监测首先可考虑视准线法。
使用传统的光学经纬仪进行视准线法观测,因其没有竖轴倾斜自动补偿功能,一旦工作基点与位移测点有较大高差,因经纬仪竖轴倾斜引起的系统误差将无法消除。如T3经纬仪气泡偏离一格时,对于相对其高差为30 m的位移测点将产生约1 mm的系统误差。由于电子全站仪具有“三轴自动补偿”功能,可完全消除这种系统误差。应当注意到,全站仪中的“三轴自动补偿”功能只是在度盘读数中自动加入改正,并非物理上的轴系改平,所以如果全站仪作视准线法观测要发挥其“补偿”功能,可采用“小角度法”。再者,全站仪望远镜的放大倍率均不高,用人工照准觇牌的照准误差较大,况且TCA全站仪无水平制动设施。采用小角度法观测,通过增加后视点的照准次数(水平方向观测法中的归零也提高了照准精度),可以有效地提高视准线观测的精度,故采用全站仪用于视准线小角度法监测水平位移已逐渐普及。
为满足规范规定的监测精度,小角度法监测水平位移的视线长度不应过长,过长时可分左右岸两端设站观测就近的位移测点,也可在中间增设一处测站(临时工作基点),采用分段且每段分两端设站的方法进行。视线过长,还可在中间增设两处以上测站。这种中间设站分段观测法的精度受中间设站点本身位移监测精度的影响。以湖南镇水电站大坝为例,对视准线小角度法的精度进行分析。
2 视准线小角度法监测精度分析
2.1 小角度法监测理论精度分析
小角度法是采用全站仪(或精密经伟仪)精确地测出基准线与观测点视线之间所夹的小角度β,求出观测点与规定轴线方向的偏移量,见图1。小角度法位移量观测值全中误差为:

式中:β为工作基点和位移测点的连线与坝轴线方向间的水平夹角(″);ρ为常数,取206 265;Ms为距离观测全中误差,可按全站仪(测距仪)标称精度进行计算,高精度全站仪(测距仪)观测精度可控制在±1.0 mm以内;Mβ为小角度观测全中误差,当观测环境良好,观测时间较短,大气折光较弱且在小角度水平角观测值中能基本抵消水平折光影响等理想条件下,视线在100~200 m,采用J1级测角仪器通过二测回观测,Mβ可控制在±(0.7~1.0)″,视线在200~500 m,采用J1级测角仪器通过四测回观测,Mβ可控制在±(0.7~1.0)″;S为工作基点到位移测点水平距离;M仪中为仪器对中误差和后视目标对中误差,这两项误差不会产生累积,其综合影响最大值将不超过其中最大的一项,考虑到大多数位移测点距测站较近,宜以M仪中权重为大(如仪器对中误差,采用强制对中底座一般可控制在±0.2 mm,后视目标对中误差同M目标);M目标为位移测点目标偏心(对中)误差,当采用与全站仪配套的高精度免调节变形监测专用棱镜组,M目标可减小为±0.2 mm,采用常规棱镜组该项误差在±(0.3~0.6)mm。
按式(1)计算,如在混凝土坝采用全站仪通过视准线小角度法观测水平位移中,取Mβ=±0.7″,S=150 m;M仪中为±0.2 mm,M目标为±0.4 mm。则最弱点位移量全中误差为:

满足规范规定的±1.0 mm限值要求。在同样的小角度观测精度情况下,当观测点视线长度超过160 m时,位移量全中误差将超过±1.0 mm限值要求。为满足规范规定的精度,除可采用左右岸两端设站观测就近测点的方法,也可采用中间设站分段观测法进行。
2.2 小角度中间设站分段观测法
图1为小角度中间设站分段观测法工程实例。该图为浙江衢州湖南镇水电站大坝坝顶视准线中间设站分段观测法布置图,大坝为混凝土支墩坝,最大坝高129 m,坝顶长440 m,共分23个坝段,其中1~20号坝段长度均为20 m。大坝坝顶水平位移采用视准线法观测,在大坝左右两岸分别布设的基左、基右两个工作基点纳入大坝水平位移监测控制网中,按规范规定定期进行工作基点本身水平位移的复测。在坝顶4号坝段、14号坝段分别布设了正倒垂组观测该坝段坝顶水平位移,其中正垂线测线长度均为105 m,倒垂线测线长度分别为42 m和32 m。
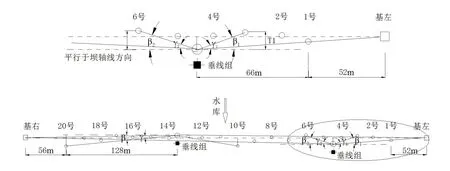
图1 中间设站分段观测法Fig.1 Segment monitoring by setting intermediate station
2.2.1 视准线中间设站分段观测
坝顶视准线分4段进行观测,分别在4号测点、14号测点增设临时工作基点,临时工作基点本身位移通过垂线组进行观测。该两处垂线组正垂线较长、重锤重量不够、布设的环境防风效果不理想,观测误差较大,经垂线组多年监测资料统计分析,得到垂线组坝顶测点水平位移量观测值全中误差达±0.8 mm。
2.2.2 小角度法观测
视准线小角度法水平方向观测均采用Leica TM50全站仪配合高精度免调节变形监测专用棱镜组(偏心误差为±0.2 mm)二测回进行。为了削弱照准误差,每一方向采用“双照准法”观测,即照准目标两次测读两次。各测回采用同样的起始方向和度盘配置(0°00′10″),其中秒值允许作微小(如±10″范围内)调整。
坝顶视准线中间设站分段观测法,分别在4号、14号坝段测站安置全站仪,以方向观测法二测回进行水平方向观测,得到小角度值γ,并按照视线长度及观测环境等综合评定测角全中误差Mγ。其中:
(1)4号坝段中间测站左岸:以基左作为零方向(后视点),其上半测回观测顺序为依次照准基左、4号、3号、2号、1号、基左,测角全中误差Mγ=±0.7″;
(2)4号坝段中间测站右岸:以基右作为零方向(后视点),其上半测回观测顺序为依次照准基右、9号、8号、7号、6号、5号、基右,测角全中误差Mγ=±1.0″;
(3)14号坝段中间测站左岸:以基左作为零方向(后视点),其上半测回观测顺序为依次照准基左、13号、12号、11号、10号、基左,测角全中误差Mγ=±1.0″;
(4)14号坝段中间测站右岸:以基右作为零方向(后视点),其上半测回观测顺序为依次照准基右、20号、17号、16号、15号、19号、14号、18号、基右,测角全中误差Mγ=±0.7″。
2.2.3 中间测站垂线修正
因4号坝段、14号坝段中间测站本身存在位移,因此每次小角度观测的同时需要观测4号坝段、14号坝段垂线组,以计算4号坝段、14号坝段中间测站本身的位移量。
2.2.4 位移测点边长观测
边长观测时,分别在4号、14号坝段中间测站安置全站仪,按精密测距法观测两测回,一测回盘左、盘右共测读平距四次(上、下半测回各两次)。其中:
(1)4号坝段中间测站左岸:其上半测回观测顺序为依次照准基左、4号、3号、2号、1号;
(2)4号坝段中间测站右岸:其上半测回观测顺序为依次照准基右、9号、8号、7号、6号、5号;
(3)14号坝段中间测站左岸:其上半测回观测顺序为依次照准基左、13号、12号、11号、10号;
(4)14号坝段中间测站右岸:其上半测回观测顺序为依次照准基右、20号、17号、16号、15号、19号、14号、18号。
每个测站边长观测时,在该测站测前、测后应分别在仪器站和棱镜站读取温度、气压及湿度。边长观测时将仪器设定为不进行气象改正,记录观测边长(平距)再进行气象改正和常数改正计算。
位移测点边长观测每年进行一次。
2.2.5 中间测站偏离值基准值观测
为计算中间测站到坝轴线的偏离值,边长观测的同时应观测中间测站与基左、基右的夹角,该夹角采用方向法观测两测回。
(1)4号坝段中间测站:其上半测回观测顺序为依次照准基右、基左。
(2)14号坝段工作基点:其上半测回观测顺序为依次照准基左、基右。
中间测站偏离值在基准值观测时进行,后期通过垂线观测进行修正。
2.2.6 各位移测点位移量计算
每次观测时求得各位移测点偏离坝顶视准线的偏离值,首先根据垂线组观测值计算得到中间测站点本身与坝轴线的偏离值,再根据视准线法观测求得各位移测点与中间测站点和后视工作基点构成的视准线的偏离值,两偏离值之和为各位移测点偏离坝顶视准线的偏离值。本次偏离值与首次偏离值之差即为累计水平位移量。
2.3 小角度中间设站分段观测法精度分析
2.3.1 理论精度计算
视准线小角度分段观测法位移量观测值全中误差为:

该计算公式同式(1),中间测站(临时工作基点)本身位移量观测中误差M测站将直接引起位移测点观测中误差,M测站所引起的位移测点偏离值中误差计算视为M仪中。在本工程中,位移测点边长每年观测一次,未进行边长观测的情况下Ms能保证在±10 mm以内;如各中间测站点与基左基右构成的视准线偏离值均在±200 mm以内,中间测站点和位移测点的连线与坝轴线方向间的水平夹角β均较小(小于2 062.6″),则在±0.1 mm以内,可忽略不计。因β等于观测角γ加上一偏离角值(中间测站点与后视点连线与坝轴线的偏离角值),偏离角值误差作为M仪中按照中间测站点仪器对中误差按比例缩减进行计算,故Mβ=Mγ=±(0.7~1.0)″。M仪中根据各位移测点距中间测站点及后视点(后视点基左或基右采用高精度免调节变形监测专用棱镜组长期固定,可认为对中误差为0)的距离,按比例线性内插。如4号、14号中间测站点中间测站点4号与左岸基左后视工作基点之间的1号位移测点中间测站点14号与右岸基右后视工作基点之间的位移测点如18号位移测点中间测站点4号与右岸基右后视工作基点之间的9号位移测点=±0.2 mm。
计算得到各位移测点位移量全中误差MΔT均在±1.0 mm以内(见表1),满足规范规定的±1.0 mm限值要求。

表1 小角度法观测位移量全中误差(单位:±mm)Table 1 Total mean square error of displacement monitored by small angle method
2.3.2 实测精度评估
本工程中坝顶9号位移测点视线长度最长,理论计算精度相对较低,对本工程2012~2017年9号位移测点监测资料采用多元逐步回归模型进行了分析,评估实测精度。
2.3.2.1 回归计算成果
计算的基准日期选取2012年12月13日,计算时取显著性水平α为0.05。得到坝顶9号测点水平位移回归方程如下:

2.3.2.2 模型回归效果评价
(1)9号测点水平位移模型回归方程,复相关系数R=0.986,回归方程统计量F=358,远大于4,说明回归方程的复相关系数较大,相关性极好,回归效果良好。
(2)回归方程标准差S=±0.936 mm,仅占总变幅的0.05%,说明回归方程精度较高,同时也说明坝顶水平位移监测精度较高,满足规范规定的±1.0 mm限值要求。回归方程标准差S包含了回归方程本身的回归误差及监测值误差,故实际监测值误差应略小于回归方程标准差S,说明实际监测值误差与理论计算精度一致。
(3)9号测点水平位移统计模型回归计算拟合图见图2。
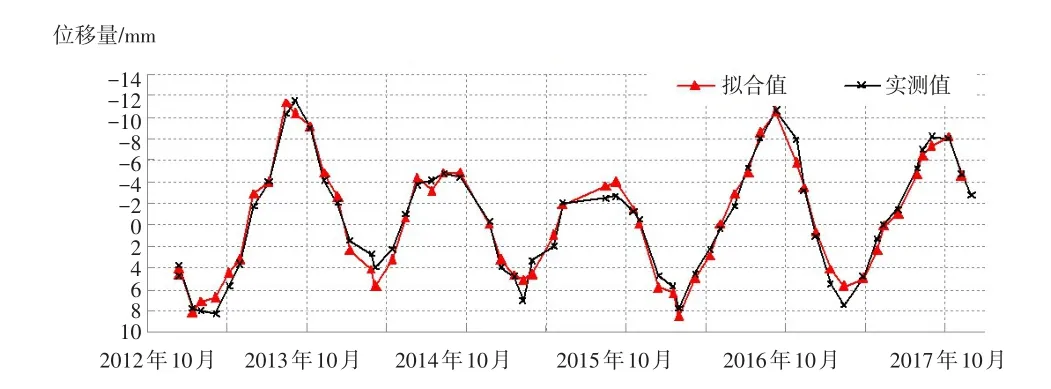
图2 坝顶9号测点水平位移回归计算拟合图Fig.2 Fitting graph of regressive calculation of horizontal dis⁃placement by monitoring point 9 on dam crest
3 结语
(1)视准线小角度法监测水平位移为满足规范规定的监测精度,对于混凝土坝最大视准线长度不大于150 m、土石坝最大视准线长度不大于300 m的,可按单段视准线法观测;对于混凝土坝最大视准线长度在150~300 m、土石坝最大视准线长度在300~500 m的,可分左右岸两端设站观测就近的测点;混凝土坝最大视准线长度超过300 m、土石坝超过500 m时,可在视准线中间增设一处或多处测站(临时工作基点)的方法将原视准线分成两段或多段观测以减小视线长度来提高观测精度。
小角度中间设站分段观测法观测误差可将与视线长度呈线性关系的照准误差转化成多段照准偶然误差的累积,即将误差的线性累积转化成平方和的平方根关系,类似于水准测量中控制视线长度提高观测精度。如分成n段后,最弱点照准误差可减小至不分段的但增加了设站点本身的观测误差,且其影响到各位移测点,故宜尽量减小设站点本身的观测误差。总体上中间设站分段观测法可明显提高最弱点位移量观测中误差。
(2)中间设站工作基点(临时工作基点)本身的位移首先考虑通过中间测站点同一部位的垂线(组)观测得到,没有条件的可通过左右工作基点采用视准线法观测得到。视准线法观测中间测站点位移可按视准线法直接观测进行,为了提高精度、减少外业工作量,可在中间测站点上安置仪器,观测中间测站点与相邻工作基点或相邻中间测站点间的夹角变化,计算得到各位移测点的位移量。
当采用垂线(组)观测中间设站点本身的水平位移时,应保证垂线(组)观测精度满足要求。对于混凝土坝,垂线(组)观测水平位移全中误差宜控制在±0.7 mm以内;对于土石坝,倒垂观测左右岸坡工作基点水平位移全中误差可控制在±1.0 mm以内。当采用视准线法观测中间设站点本身水平位移时,对于混凝土坝,可参考垂线(组)的观测误差要求进行控制;对于土石坝,采用视准线法观测中间设站点本身水平位移全中误差可控制在±2.0 mm以内。对中间设站点本身水平位移中误差如何控制,应根据具体工程进行优化。
(3)小角度法观测,如设站点或位移测点在上下游方向偏离基左基右构成的视准线过大,即设站点和位移测点的连线与坝轴线方向间的水平夹角β过大(如本工程中的β1过大)时,则应每次在测站对β过大的位移测点进行边长观测,以尽量减小的误差。根据不影响原则,一般在混凝土坝小角度法观测水平位移中,β不宜超过1.5°;土石坝小角度法观测水平位移中,如考虑Ms能保证在±50 mm以内,β不宜超过1.0°,否则应每次在测站对β过大的位移测点进行边长观测。
(4)在同一测站中因每个位移测点都使用同一后视点,为提高小角度观测精度,要尽量提高后视点观测精度,使其成像清晰稳定、距离适中,并尽量削弱障碍物导致的折光误差。在小角度法观测水平角过程中,因后视方向与位移测点方向构成的夹角较小,大气水平折光对水平角两个方向的影响相当,水平角计算中水平折光影响大部分可以抵消,故小角度或活动觇牌法观测过程中,大气水平折光的影响要比常规水平角(不同的大气环境变化)观测小一些,有利于水平角或活动觇牌照准观测精度。在视准线法测点布置时,工作基点至后视与位移测点之间的水平夹角应尽量减小,尤其是视线较长的情况。
(5)本实例中小角度法观测采用高精度免调节变形监测专用棱镜组,明显提高了观测精度、节约了工作时间、减轻了劳动强度。中间设站法可不在整条视准线两端点(如基左、基右)设站进行观测,仅在两端点安置高精度免调节变形监测专用棱镜组(常规棱镜组每次仍需到两端点进行棱镜调平安置),明显减轻了劳动强度。
猜你喜欢
照明工程学报(2023年4期)2023-12-09 07:07:12
人民黄河(2023年6期)2023-06-08 09:15:26
中学数学研究(江西)(2022年5期)2022-05-08 04:31:06
中国水能及电气化(2020年11期)2020-12-25 03:06:54
水力发电(2020年1期)2020-04-23 01:22:40
时代汽车(2019年4期)2019-06-11 03:41:29
军事体育学报(2017年2期)2017-12-31 13:45:24
水利科技与经济(2016年8期)2016-04-22 03:41:40
淮北师范大学学报(自然科学版)(2014年4期)2014-07-04 06:21:46
福建中学数学(2013年1期)2013-03-06 01:46:00