四旋翼机器人运动控制与动力学研究与设计
2018-08-28 09:13汤颖,赵彬
机械设计与制造 2018年8期
汤 颖 ,赵 彬
1 引言
在新型材料、电子元件和控制算法的飞速发展下,四旋翼机器人在最近几年有了长足的发展。并且在民用领域和军事领域都有广阔的应用前景。四旋翼飞行器不仅可以垂直起降和悬停,而且可以实现前后、左右平移、俯仰和旋转等。因此,飞行机器人具有在危险场景,自然灾害等各个领域的强大的适应能力。
纵观当今机器人行业发展现状,科研院所、高校和机器人公司针对四旋翼机器人控制技术进行了几十年的探索,已经总结出了一套技术基础。例如:文献[1]针对四旋翼机器人的模糊位置控制进行了深入的研究。当吹风时,四旋翼机器人难以进行位置控制。原因是模型的不确定性。在传统的线性和非线性控制器方法的情况下,依赖于精确的动力学模型,并不明确地解决扰动。使用模糊控制器补偿模型不确定性控制飞行机器人的仿真模型[1]。文献[2]针对四旋翼机器人运动难以控制,因为其控制系统是具有非线性,强耦合和对扰动敏感的特征的多输入多输出。鉴于这个问题文献[2]采用基于向量基的遗传控制算法和模糊控制算法进行了智能系统控制方法对飞行器进行控制。文献[3]针对四旋翼直升机参数的动态建模与参数辨识,通过模拟程序获得了适合的模型。使用相同的控制器在闭环系统中进行模拟和实际系统的比较[3]。文献[4]针介绍了四旋翼机器人的运动规划稳定性研究。还提出了特定的结构,四旋翼悬停的同时产生稳定的轨迹[4]。四旋翼机器人本体的结构组成包含:在机身中安装超声波传感器以测量飞行的实际高度,同时携带加速度传感器,陀螺仪传感器和地磁传感器以测量旋转角度和角速度[5-6]。携带的GPS/GLONASS全球定位系统用于检测当前无人机的实际位姿。此外,将运动控制和动力学算法应用到四旋翼机器人可以实现稳定的飞行。由于,很难根据周围的动态环境来创建模型。鉴于此,采用模糊自适应控制和PID控制完了对四旋翼控制器的位姿控制,通常应用基于模型的控制方法来执行准确的位置控制。
2 四旋翼基本运动状态
如图1所示,四旋翼机器人机体的机械结构对称,四个旋翼均在一个水平面内,运动特性具有几何对称的规律[7-8]。四旋翼机器人只能依靠改变电机转子的度来进行悬停、俯仰、滚动和偏转,这里所研究的四旋翼机器人采用正交方式安装,其重心和中心重合。

图1 四旋翼飞行器Fig.1 Four-Rotor Aircraft
四个旋转器在一个正方形的四个顶点上。将四旋翼机器人从逆时针依次编队,前后位1旋翼和3旋翼,左右为2旋翼和4旋翼。同时根据四旋翼旋转的方向分为逆时针和顺时针。并且进行运动控制时,处于对角线旋翼的旋转方向是一致的,两个转子在对角线上。

表1 旋翼速度控制表Tab.1 Speed Control of Four Rotor Helicopter
2.1 垂直升降与悬停
垂直升降与悬停的控制方式:同时增加或减少四个旋翼转子的输出功率,使得旋翼转子转速改变增加或减少,旋翼转子的转速增加使得无人机整体总拉力增大或减小。当无人机总拉力大于飞机重力时,在升力的作用下四旋翼机器人垂直上升的运动;当无人机总拉力等于重力时,四旋翼机器人处于力平衡的状态可以实现悬停。
2.2 前后和侧向
四旋翼机器人前后和左右平移控制方式:无人机在水平面进行前后、左右的运动必须首先保证其他方向无侧向力,而且在此基础上对在水平面内施加一定的力使得进行前后和左右移动。具体来说增加后旋翼3转子的转速,使得旋翼3端的侧向拉力上升,同时减少前旋翼1转子的转速,使得旋翼1的侧向拉力减少,总的拉力合理为旋翼3方向的水平拉力,同时保证反扭矩平衡,四旋翼机器人在侧向力的作用下进行侧向移动。
2.3 水平旋转
四旋翼机器人实现水平旋转首先要保持水平方向无侧向力,无人机水平旋转控制方式:保持左右旋翼的转子输出功率相同,前后旋翼的转子的输出功率相同。前后旋翼(1和3)转子升力增加,左旋翼2转子和右旋翼4转子的两端升力保持一致,并且同时下降。前旋翼1转子与后旋翼3转子对四旋翼机身整体的反扭矩要大于左旋翼2与右旋翼4的反扭矩,产生了绕Z轴旋转的力,实现无人机的水平旋转。
3 四旋翼结构动力学模型
四旋翼机器人四个旋翼显十字分布,因为其结构对称,比起传统的无人机有独特的优点,所以分析起来更为容易。在设计四旋翼机器人时结构参数时,需要加入动力学有限元分析,有助于研究其飞行规律,避免其设计失误。同时在四旋翼机器人飞行控制时,加入动力学有助于四旋翼飞行器的平稳飞行,对于机身的单旋翼的力和力矩控制更有利于分析。四旋翼机器人是一个成熟的学科,也是一个热门的学科。在四旋翼机器人加入动力学有效缓解强烈震动,增加稳定性。研究的是动力学的简化模型,不考虑阻尼力、惯性力和空气摩擦弹性力。
3.1 无人机坐标系
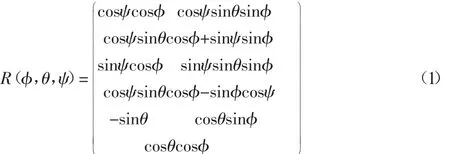
物体运动都是在特定的参考坐标系下来描述的,因此建立合适的参考坐标系是建立四旋翼机器人非线性动力学模型的必要条件,同时可以描述旋翼飞行器线、角运动也需依托特定的坐标系。如图2所示,建立四旋翼机器人机器人的分析参考坐标系[9]。四旋翼机器人的航向角、俯仰角和翻滚角都与四旋翼机器人的这些坐标系联系在一起。所以要想正确平稳的控制无人机,就要分析各个坐标系之间的相互关系和转换关系式。
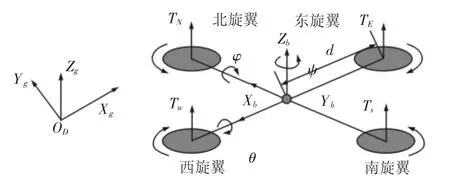
图2 操作坐标系、机体坐标系和地面坐标系Fig.2 Operation Coordinate System,Body Coordinate System and Ground Coordinate System
图中:TW—四旋翼机器人西旋翼1的扭矩;TS—南旋翼2扭矩;TE—东旋翼3扭矩;TN—北旋翼4扭矩;d—旋翼升力作用点到质心的距离。一般来说分析无人机姿态需要:偏航ψ、俯仰角θ和滚转角φ,其姿态公式如下:
3.2 动力学特性
四旋翼机器人其动力学特性为非线性系统,动力学结构比较复杂,一般采取的方案是简化动力学方程。四旋翼机器人简化动力学约束条件为:(1)旋翼相互之间为对称结构;(2)旋翼重心和几何重心重合;(3)旋翼与空气摩擦力看为0。建立的四旋翼动力学模型为:

式中:ψ—偏航角;θ—俯仰角;φ—滚转角;Ix,Iy,Iz—机体 x 轴,y 轴和z轴的转动惯量,地面坐标系下旋翼飞行器所受到的阻力Fr=[frxfryfyz],Jr—单个电机和旋翼一起对电机旋转轴的转动惯量;m—旋翼飞行器的质量。旋翼飞行器的输入为:

式中:b—旋翼的拉力系数;wi—第i个旋翼的转速;l—机械臂长;kr—反扭矩系数。
4 模糊自适应PID控制器
四旋翼机器人整体系统组成,如图3所示。其中四旋翼自动驾驶仪为无人机的重要核心部件,作为姿态控制器保证飞机能够平稳的飞行。姿态控制器的其作用主要是保持飞机姿态和辅助操作人员操纵无人机。通过使用经典方法,将控制对象简化为线性和小扰动模型,然后把问题的重点放在控制小扰动模型。

图3 无人机自动驾驶仪Fig.3 Four-Rotor Aircraft Autopilot

图4 传统的PID控制器原理图Fig.4 Traditional PID Controller Schematic
公式表达式为:

式中:u(t)—被控对象的控制量;e(t)—无人机控制对象的误差输入量;kP、kI、kD—比例、积分和微分控制参数。
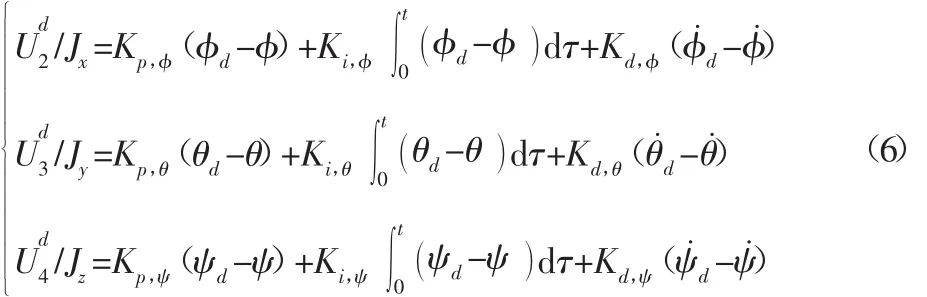
姿态控制器的输出为三个姿态角,假设飞行器是在小姿态角下飞行,由飞行器的姿态模型可以简化为:

令输入目标值为Ud,滚转角、俯仰角、偏航角目标值和测量值分别为 φd、θd、ψd、φ、θ、ψ,则对应的 PID 控制器可表示为式(6)所示。
4.2 模糊自适应PID控制器设计
基于传统意义的PID模型思想下,加入了模糊自适应的理念模型,可以实现动态的PI参数自调整,以适应周围环境变化带来的扰动。如图5所示,为模糊自适应PID控制器结构,该控制结构具有双速率回路。不仅深入分析了控制结构的抗干扰能力,而且引入了自调整因子和自学习控制规则,提高了系统的快速响应能力。变速积分PID控制用于确保系统的高精度和稳定性。可变模糊自适应PID控制方法具有更好的动态响应性能和适应能力,具有较少的过冲,更短的调整时间和更高的跟踪精度。

图5 模糊自适应PID控制器结构Fig.5 Fuzzy Adaptive PID Controller Structure
4.1 PID控制器设计
PID控制器一直以来被广泛使用,其设计结构不复杂,控制参数少和实现容易。PID控制器长久以来是工业领域使用最多的控制算法[9]。同样在旋翼飞行器的控制器中也是最常用的控制算法,传统的PID控制器原理图,如图4所示。
5 实验及结果分析
5.1 飞行状态实验
四旋翼机器人是一个多变量非线性的强耦合系统。四旋翼机器人控制器主要涉及的姿态控制主要是为解决各种噪声和干扰导致引起的系统不稳定无人机很难保持正确的飞行轨迹的问题而提出的。四旋翼机器人在飞行过程中会出现噪声干扰和质量的变化,同时导致旋翼飞行器的动力学模型发生细小的变化,导致动力学参数不稳定,该四旋翼机器人控制器可以解决外界干扰导致重心变化,不需要修改控制参数和控制模型,也不必修改动力学模型。如图6所示,为四旋翼机器人的飞行试验效果图,该无人机在飞行时候能够保持平稳飞行,同时实时的在模糊自适应控制控制器调整调整PID参数,以适应环境的变化。

图6 四旋翼机器人飞行实验图Fig.6 Four-Rotor Aircraft Flight Test
5.2 姿态控制实验
一般来说电机伺服有3个环,分别为位置环、速度环、电流环,其中电流环为最内环,反应速度最快,位置环为最外环,响应速度最慢。如果选择位置模式方式,位置、速度、转矩都能控制,此方式应用最多;而选择速度模式,只能控制速度和转矩;而采用转矩模式只能控制转矩。将模糊自适应控制控制器应用到四旋翼机器人进行实时调整PID参数时采集的姿态角度跟踪效果图,如图7所示。
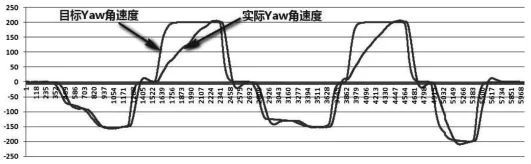
图7 姿态角度跟踪效果Fig.7 Attitude Angle Tracking Effect
测试最大跟踪角速为200°/s。从上图情况来看,反向目标角速度跟踪比较好,正向跟踪较为缓慢。具体原因在下图中给出了解释。
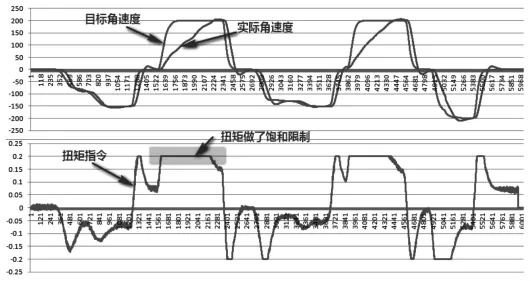
图8 正反向运转跟踪效果Fig.8 Forward and Reverse Operation Tracking Effect
Yaw角速度调节扭矩进行了饱和限幅处理,如图8所示。正向运转跟踪速度慢,是因为达到了人为设定的一个扭矩限制值。而反向运转未达到这个饱和限制值。这就是为什么正向运转跟踪速度慢,而反向运转跟踪良好。从实验中可以看出,四旋翼机器人的控制器不仅保证了无人机飞行的过程中保持了各种姿态下稳定飞行,而且可以保持与设定轨迹基本一致。
6 结论
针对四旋翼机器人运动控制、动力学和姿态控制器的设计方法进行了深入的研究。首先根据四旋翼机器人的对称式机械结构分析了其机构特征及主要的用途。其次,根据四旋翼正交安装的结构特征进行了运动控制分析,实现了悬停、前后移动、水平移动、俯仰运动和翻转运动等。再次,建立了四旋翼机器人的非线性动力学数学模型,实现了无人机的实时的力矩控制。最后,针对无人机在室外搬移物体引起无人机质量和重心的变化,甚至不可避免地会受到各种噪声和干扰导致无人机很难保持正确的飞行轨迹,针对这一问题采用了基于模糊自适应PID方法加入到了四旋翼机器人的控制器。
通过实验证明了无人机运动控制算法、动力学算法和模糊自适应控制器的稳定性、准确性和鲁棒性。该四旋翼机器人控制器可以解决外界干扰导致重心变化,只需将重心偏移量添加到控制输入中,直接适应小型四旋翼飞行器载体重心的变化,不需要修改控制参数和控制模型,也不必修改动力学模型。实现了四旋翼机器人最最重要的问题就是保证飞行过程中各种姿态下保持稳定飞行,同时保持与设定轨迹一致。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
装备制造技术(2020年2期)2020-12-14
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
凿岩机械气动工具(2017年3期)2017-11-22
北京航空航天大学学报(2016年8期)2016-11-16
中国机械工程(2015年13期)2015-12-16
小朋友·快乐手工(2015年5期)2015-06-06