二维弹道修正弹复合制导方法*
2018-08-27 09:56:42钟扬威王良明
弹箭与制导学报 2018年4期
王 琦,钟扬威,王良明
(1 南京理工大学能源与动力工程学院,南京 210009;2 中国航天科工集团第九总体设计部,武汉 430040)
0 引言
二维修正弹是一种普通弹药和现代高新技术相结合的典范,能在飞行弹道的恰当弧段上根据弹箭偏离预定轨迹或偏离目标的情况,通过燃气动力或空气动力对弹道进行修正,减少弹道偏差向目标靠近,从而大幅提高命中概率[1],同时价格又比导弹低得多,目前国内已对二维弹道修正弹展开广泛的研究[2]。
1 速度方向修正的制导方法
首先根据炮位和目标位置信息解算出一条标准弹道并选取一些特征点储存连成一系列线段组成所需的方案弹道[3]。在每一段跟踪弹道中,通过弹丸任意时刻的坐标(x,y,z)和下一微小时刻期望到达的坐标(xc,yc,zc)可以得到速度高低角和速度方向角的指令:
(1)
所谓速度方向修正,就是要消除弹丸速度v与弹丸质心和期望坐标连线的夹角。其中速度高低角的增量为θac-θa,速度方位角的增量为ψ2c-ψ2,则可求出相位角:
(2)
相位角φψ相较于固定舵滚转角γfc存在一个前置角χ,χ的计算公式为:
(3)
式中:
Rχ=-by·
Iχ=-by·
则:
γfc=φψ-χ
(4)
这样就可以通过控制固定舵滚转角γfc来实现方案弹道跟踪。
2 落点预测制导方法
二维弹道修正弹的固定舵滚转角固定为0°时落点射程会比无控的时候小,而侧偏会较之更大[4]。利用这点可以先算出无控落点P1的坐标(xP1,yP1,zP1),再算出如果将固定舵滚转角固定为零时的落点坐标P2(xp2,yp2,zp2)。由上可知,xp2
χp=2π-arccos((xp2-xp1)/
(5)
同理,无控落点P1和目标P3(xP3,yP3,zP3)也存在一个偏差角λ为:
(6)
这样就可以求出固定舵滚转角的计算公式:
γfc=λ-χp
(7)
3 建模仿真
文中以初速930 m/s,质量45.5 kg,弹径0.155 m,弹长0.9 m,射角分别为30°和55°,算出方案弹道后在初值基础上初速加10 m/s,射角加2°,射向加2°,形成扰动弹道,然后分别用速度方向和落点预测修正方法10 s开始去修正该弹道,部分速度方向修正效果图如图1~图6所示。

图1 射角30°速度方向修正方法下x-y曲线
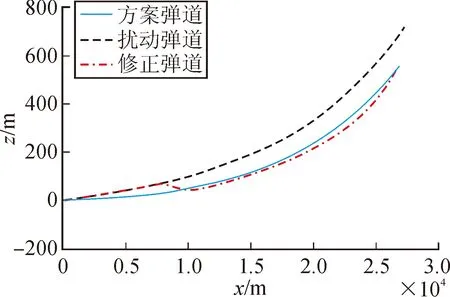
图2 射角30°速度方向修正方法下x-z曲线
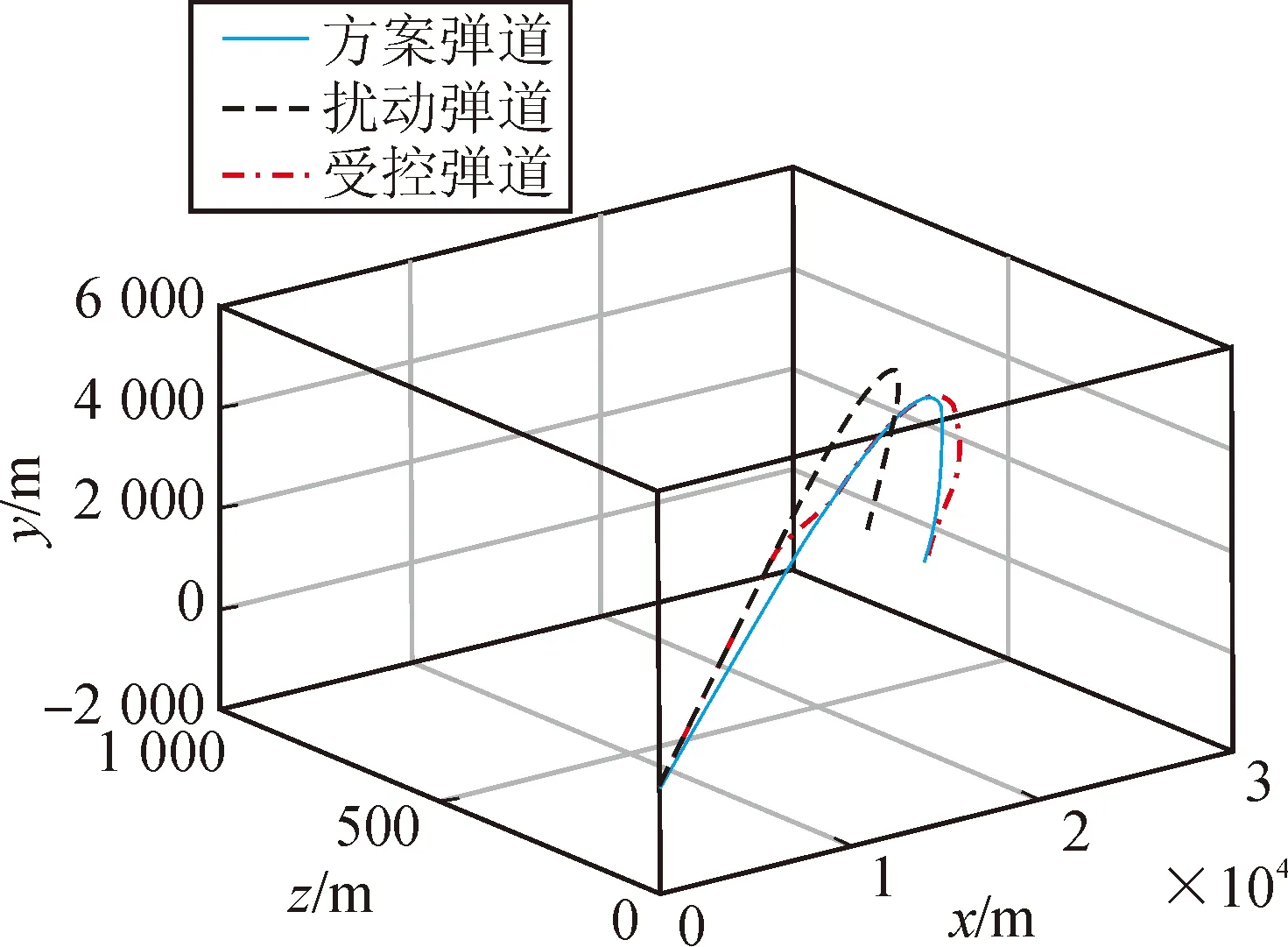
图3 射角30°速度方向修正方法下x-y-z曲线
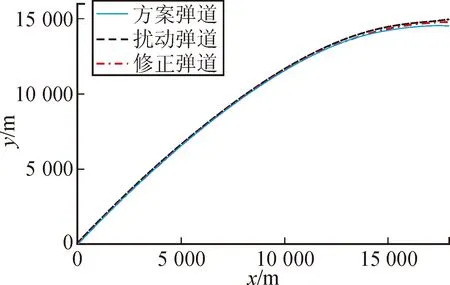
图4 射角55°速度方向修正方法下x-y升弧段曲线

图5 射角55°速度方向修正方法下x-y降弧段曲线

图6 射角30°速度方向修正方法固定舵滚转角指令曲线
具体仿真结果如表1、表2所示。
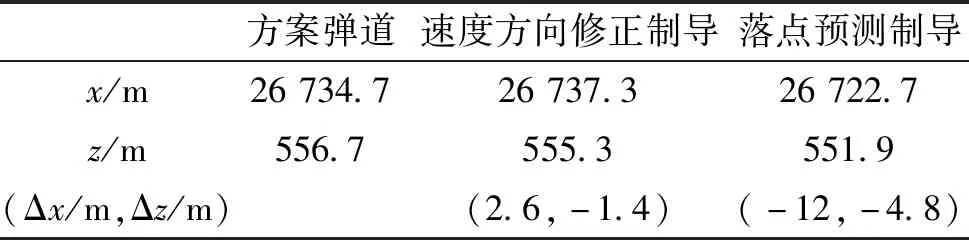
表1 30°射角下仿真结果表

表2 55°射角下仿真结果表
由仿真结果可以看出,小射角情况下两种修正方法都有较好的修正效果,且速度方向修正的制导方法修正效果更好,在大射角下两种修正方法修正能力都较弱,落点与目标点存在较大偏差,且落点预测修正方法修正效果要更好。根据55°射角下速度方向修正制导方法的弹道仿真图像可以看出,在上升阶段该方法修正能力较强,而在顶点附近该方法修正能力较差,导致降弧段已经无法再修正回来了。而落点预测制导方法在升弧段修正能力较差而在降弧段修正能力较强。因此文中采用两种修正方案的复合制导将弹道分为两部分,在10 s后升弧段采用速度方向修正的方法,而在顶点之后至高度大于50 m采用落点预测的方法,以改善大射角下的修正效果。最终仿真结果表明在55°射角情况下采用复合制导的方式,落点偏差为(4.1 m,12.7 m),很大程度上改善了大射角下的修正效果。大射角下复合制导仿真结果放大图如图7、图8所示。

图7 射角55°复合制导方法下x-y曲线局部放大图

图8 射角55°复合制导方法下x-z曲线局部放大图
4 结论
在小射角下,速度方向修正制导方法和落点预测制导方法对二维弹道修正弹弹道都有较好的修正效果,但在大射角下单独使用一种修正方案落点偏差都较大。并且,在升弧段采用速度方向修正的方法效果更好,而在降弧段采用落点预测的方法效果更明显,因此文中采用复合制导的方式,在升弧段采用速度方向修正制导,在降弧段采用落点预测制导,较好的解决了大射角下的二维修正弹弹道修正问题。
猜你喜欢
上海航天(2024年1期)2024-03-08 02:52:28
中国水利水电科学研究院学报(2023年1期)2023-03-14 04:57:18
电子设计工程(2022年24期)2022-12-23 12:03:28
光学精密工程(2021年8期)2021-10-04 11:46:28
空间科学学报(2021年6期)2021-03-09 06:20:16
探测与控制学报(2020年4期)2020-09-02 07:52:44
测井技术(2018年5期)2018-12-26 12:03:28
太空探索(2016年12期)2016-07-18 11:13:43
新闻传播(2016年4期)2016-07-18 10:59:21
公民与法治(2016年10期)2016-05-17 04:12:52