基于扩展信息滤波的跟踪传感器选择算法
2018-08-17 03:16:24程佳林张贞凯
计算机工程与设计 2018年8期
程佳林,张贞凯
(1.江苏科技大学 电子与信息学院,江苏 镇江 212003; 2.华中科技大学 电子信息与通信学院,湖北 武汉 430074)
0 引 言
目前,利用有限的传感器资源在跟踪性能与系统资源之间实现系统整体性能最优[1],是传感器资源管理技术重要的研究方向。在目标跟踪领域和控制领域中,卡尔曼滤波(KF)是处理多传感器数据融合问题最常用的方法,但是在实际工程应用中存在融合过程运算量较大的问题。机动策略自适应目标跟踪算法,可以利用机动策略转移矩阵来改善不可避免的骤增的估计误差[2]。信息滤波[3,4](IF)融合理论已基本完善,扩展卡尔曼滤波作为一种经典的非线性滤波算法在非线性系统中被广泛使用。基于扩展卡尔曼滤波的非线性集中式融合算法及分布式融合算法[5,6]能够有效处理应用于非线性系统。利用扩展信息滤波器进行信息融合不仅解决了非线性系统的滤波问题,而且能够有效降低融合过程中运算量。
传感器选择是在利用有限的传感器资源的基础上满足对目标跟踪以及扫描空间的需求,从而获取目标各具体特性的最优值,并对传感器资源进行优化分配[7],达到跟踪性能与系统资源之间的平衡。其中,基于信息论以及集与协方差控制等传感器选择方法能够自适应选择传感器,提高跟踪精度[8,9]。为了保持跟踪精度及时效性的同时,控制系统资源消耗,采用基于任务控制的传感器管理方案获取目标威胁度[10],在此基础之上利用改进的效能函数[11],对传感器进行自适应选择,实现对传感器资源的调度。不过这些方法会面临组网中传感器数量增加时传统传感器选择方法计算量过大的问题。因此,本文考虑在线比较期望信息增益与各传感器当前信息增益,每次选取信息增益与期望信息增益最接近的传感器。最后计算传感器组合的信息增益进行融合,达到对传感器进行选择的目的。
1 扩展信息滤波
1.1 系统描述
1.1.1 信号模型
在k时刻,雷达对目标所发射的波形信号为

(1)
其中,pk为雷达在当前时刻对目标的发射功率,Sk(t)表示发射信号的复包络。
因此,雷达系统接收信号的基带形式如下

(2)
式中:hk为复数代表目标的RCS;τk是目标回波时延;αk为衰减因子,它与发射天线的增益,接收天线孔径和双向路径损耗有关。
1.1.2 目标状态模型
考虑如下离散时间非线性动态系统,目标的运动方程为
Xk=f(Xk-1)+wk
(3)

1.1.3 量测模型
目标的量测方程为
Zk=h(Xk)+vk
(4)
其中
h(Xk)=(Rk,θk)T
(5)
此处,Zk∈Rnx为观测向量,h:Rnx→Rnz为量测矩阵为可微函数。nx、nz分别为系统状态的维数和观测维数。vk是均值为零并且互独立的白色高斯过程噪声向量,协方差阵为非负定阵R。Rk可以通过时延信号τk求出,表示雷达和目标之间的径向距离
(6)
(xm,ym)表示雷达坐标;θk为目标方位
(7)
vs=[v1,v2]T为量测噪声向量。
1.2 扩展信息滤波器方程
非线性系统中,扩展卡尔曼滤波递推计算公式如下
(8)
(9)
(10)
Pk+1|k+1=[I-Kk+1Hk+1]Pk+1|k
(11)
(12)
其中,Hk为雅克比矩阵,Fk为线性化状态矩阵
(13)
(14)
(15)
(16)
将式(15)、式(16)式带入扩展卡尔曼滤波可得扩展信息滤波方程,其信息状态向量和信息矩阵的预测如下
(17)
(18)
信息状态向量和信息矩阵的估计如下
(19)
Yk+1|k+1=Yk+1|k+Ik
(20)
其中,状态贡献i(k)和信息矩阵I(k)的定义如下
(21)
(22)

1.3 多传感器状态融合
多传感器融合的主要思路是利用多个低维传感器的观测向量扩展成单个高维观测向量,在此基础上来对其进行滤波得到多传感器融合的状态估计,考虑由N个传感器节点组成的跟踪系统
h(x)=[h1(x),h2(x),…,hN(x)]
(23)
Zk=[Z1,k,Z2,k,…,ZN,k]
(24)
vk=[v1,k,v2,k,…,vN,k]
(25)
h(x)、Zk和vk分别为观测矩阵、观测向量和观测误差。由上述条件可知
E[vk]=0
(26)
Rk=diag{R1,k,R2,k,…,RN,k}
(27)

由式(19)得融合中心信息状态向量估计
(28)
由式(18)得融合中心信息矩阵估计
(29)
则扩展卡尔曼信息滤波状态更新方程即为
(30)
状态估计协方差为
Pk+1|k+1=(Yk+1|k+1)-1
(31)
2 传感器选择算法
2.1 信息增益及其计算
传统的传感器选择算法是通过期望协方差确定与其最符合的传感器分配组合对目标进行跟踪滤波。假设传感器系统中有N个传感器,那么传感器组合方式则有2N-1个,这样当组网中的传感器数量增加时,全遍历步长则会爆炸式增长。本章提出一种传感器选择算法,基于信息增益的思想,每次都将选取信息增益与期望信息增益最接近的传感器组成传感器组合,并将传感器组合的信息增益在扩展信息滤波的融合中心进行融合得到滤波结果。
由式(29)可以得信息矩阵的更新递推表达式,即协方差更新表达式;因此通过式(22)可以计算出各个传感器的对目标进行观测时的信息增益

(32)
通过设定的期望协方差矩阵,结合上述协方差更新表达式可知,满足跟踪精度要求Pd(k|k)的期望信息增益为
(33)
利用矩阵度量计算目标函数f(Ji,Jd),本文矩阵度量采用绝对值求迹,具体定义如下
(34)
即计算trace(Ji(k|k)-Jd(k)),根据协方差思想,若目标函数f(Ji,Jd)≥0,则表示第i个传感器可作为传感器组合的候选传感器,根据目标函数选取与期望信息增益最接近的传感器组合。
得到当前传感器组合后,利用Eif估计目标位置并融合。根据传感器组合中各传感器的观测值进行滤波,在扩展信息滤波器中融合中心进行信息融合。与传统传感器管理方法待选传感器组合数2N-1相比,本文方法中待选的传感器组合数为N,降低了传感器组合数量。
2.2 算法步骤
在多传感器系统中,基于扩展信息滤波的传感器选择算法的具体步骤如下:
步骤1 系统初始化设置,即设定目标的初始状态变量及期望协方差矩阵。
步骤2 计算各传感器的信息增益,并求解目标函数f(Ji,Jd)。
步骤3 根据目标函数每次选取与期望信息增益最接近的信息增益组成传感器组合,直到满足跟踪精度要求即Pd(k)-Ps(k|k)对角线上最小值大于零。
步骤4 利用Eif估计目标位置并融合。获得步骤3所选择的传感器的观测值进行滤波,由式(28)、式(29)得到扩展信息滤波器中融合中心的融合结果,输出目标跟踪位置。
步骤5 跳转至步骤2,进行下一时刻的传感器选择,直至跟踪结束。
3 仿真与分析
仿真的主要目的是验证本文提出的基于扩展信息滤波的跟踪传感器选择算法(TSSA)的有效性,并分别和文献[12]中的多传感器加权融合算法(MWFA)及只选择3个性能最优的传感器直接融合进行对比。
仿真场景是由6个传感器构成的传感器系统对一个目标进行观测,每个传感器将给出目标在x,y两个坐标上的位置信息,量测噪声参数见表1。
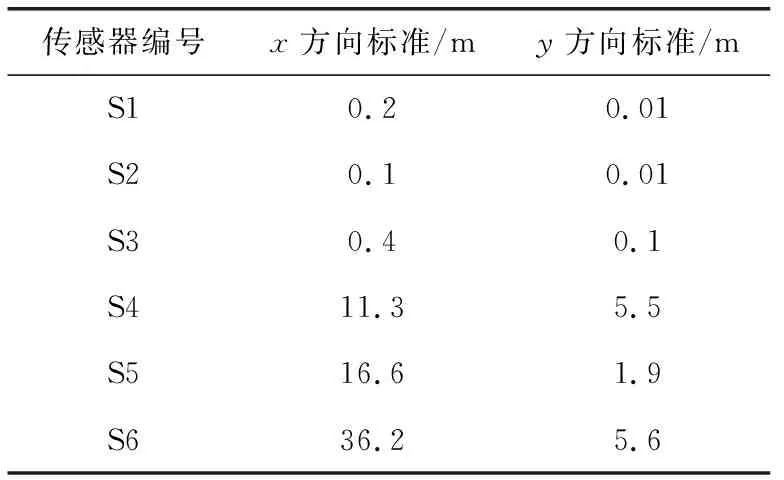
表1 传感器各方向上的量测噪声标准差
仿真时目标采用CA模型,x,y方向的加速度都受到均值为零的高斯白噪声扰动,并且每个时刻都相互间独立。采样周期为1 s,目标运动持续时间为100 s。仿真中期望协方差设置为两断,转换时刻为51 s,特征值分别为diag([0.4,0.15,0.4,0.4,0.3,0.4])、diag([0.9,0.3,0.6,0.5,0.5,0.6])。目标的初始状态x0=[10 50 5 10 2 4]T。
图1是跟踪轨迹曲线,图2是传感器系统对目标进行跟踪时的各传感器选择情况与扫描次数的关系,其中的点表示该时刻传感器的被选择;从图中不难看出,前50 s所设期望协方差特征值较小即跟踪要求较高,S1、S2、S3这3个高精度传感器使用率较高,过了第51次扫描之后期望协方差水平降低,总体的传感器使用率也随之下降。因此,本文提出的传感器选择算法可以根据期望协方差水平的变化自适应选择跟踪传感器。
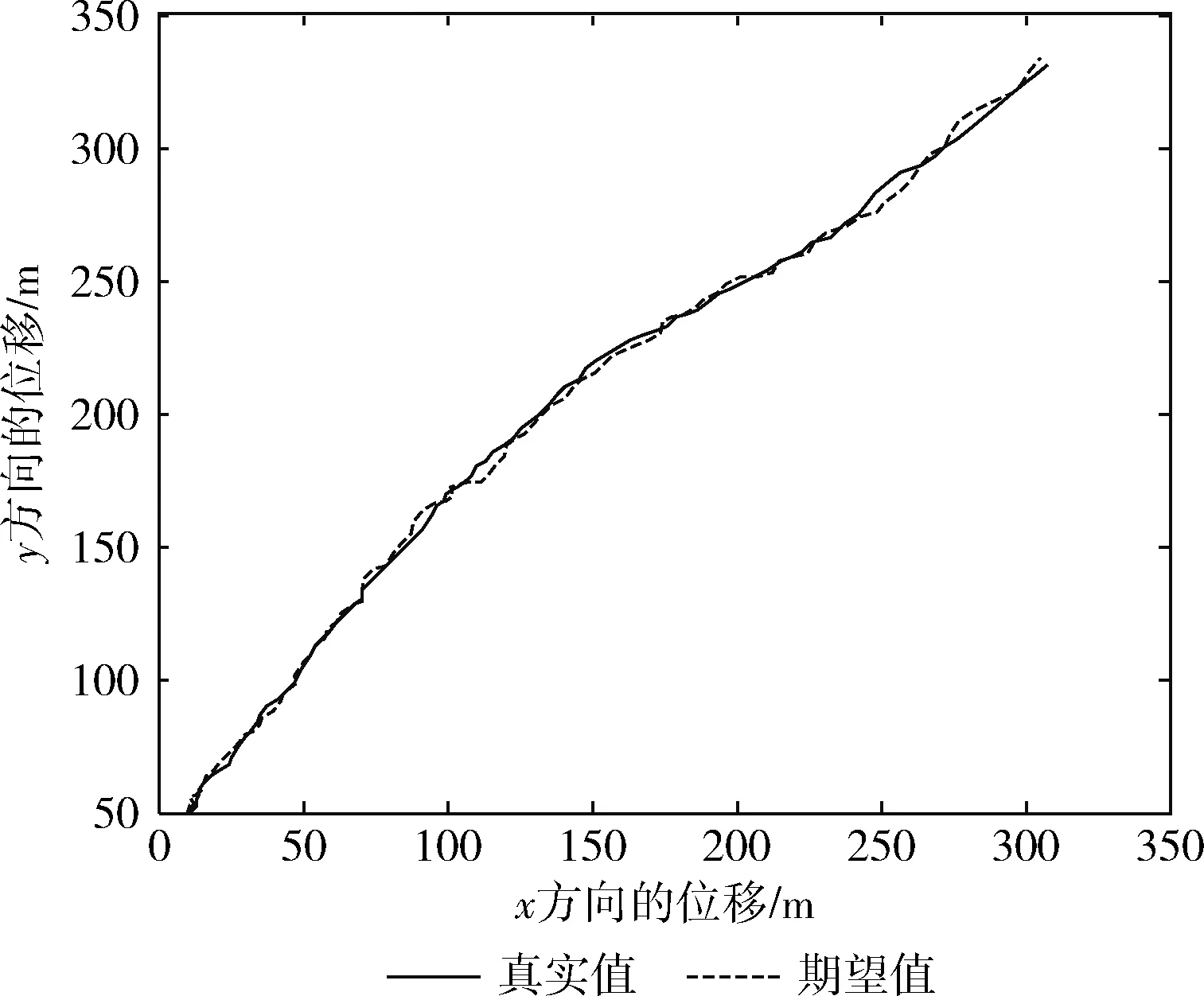
图1 目标跟踪轨迹
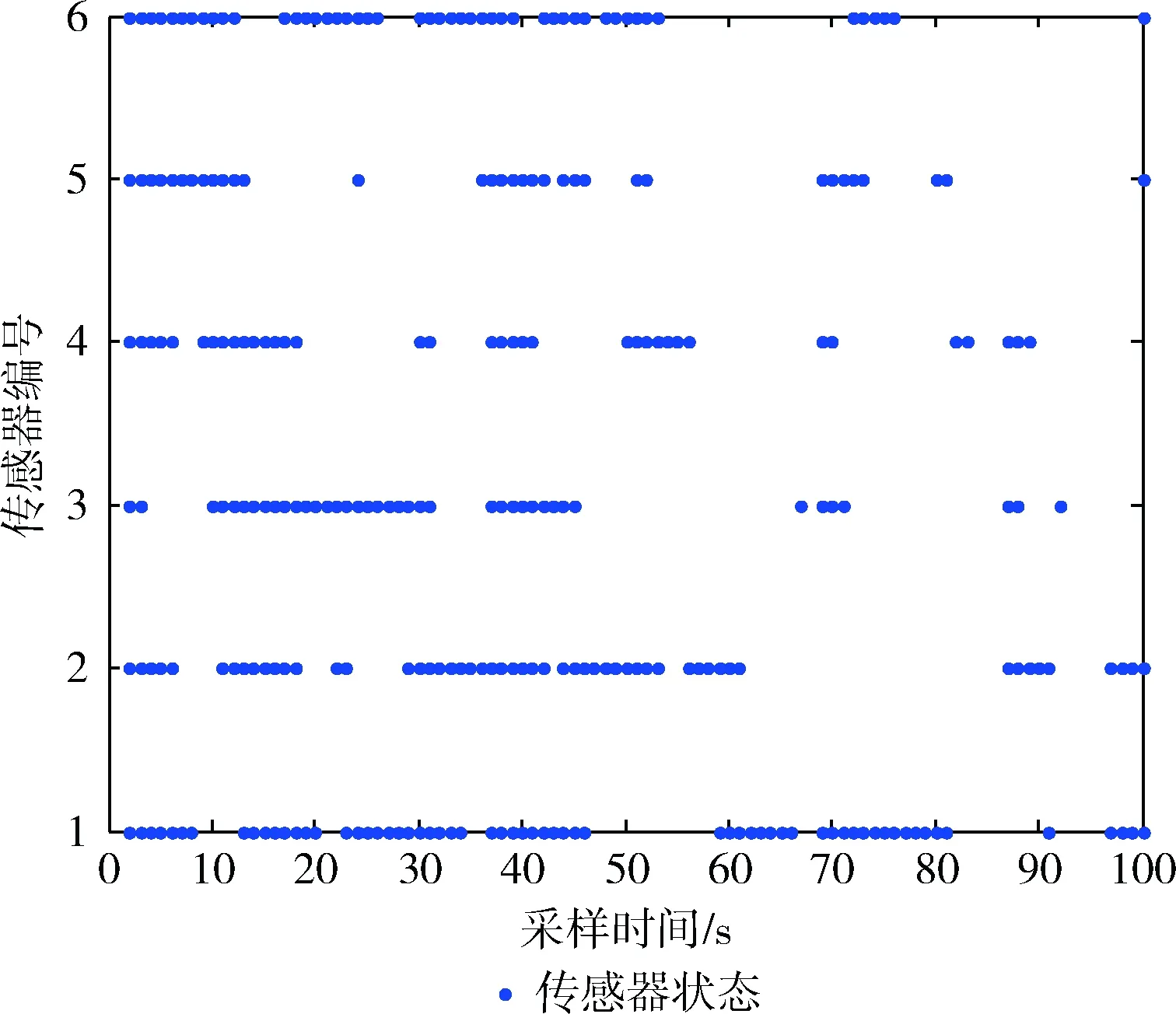
图2 传感器选择结果
图3、图4、图5分别是50次Montente Carlo仿真的位置、速度以及加速度的RMSE变化曲线。
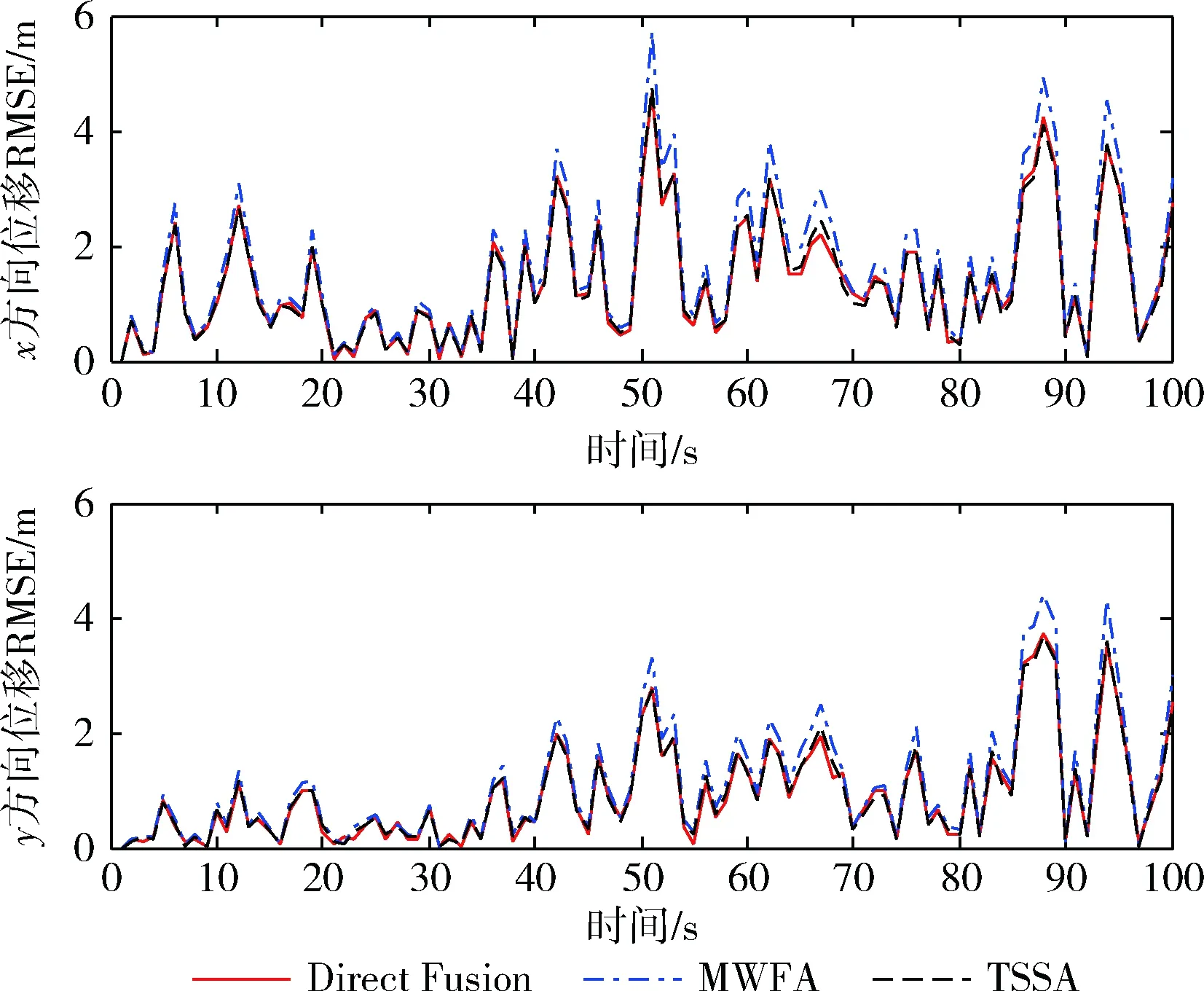
图3 位置跟踪均方根误差比较
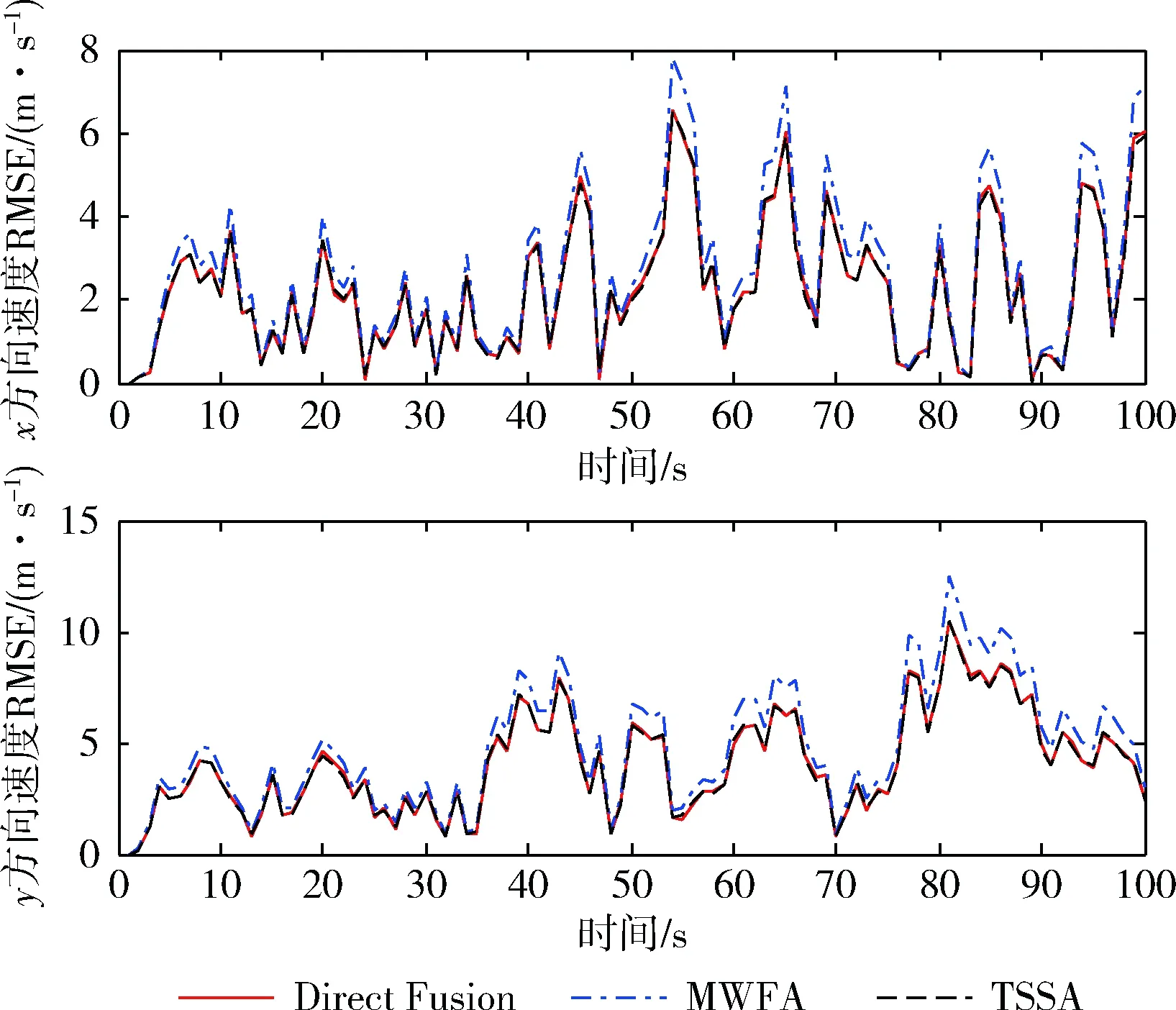
图4 速度均方根误差比较
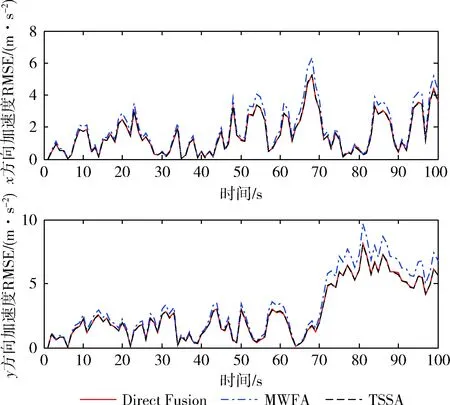
图5 加速度均方根误差比较
在目标跟踪过程中当前时刻k时的均方根误差(RMSE)表达式如下
由图3、图4及图5的RMSE曲线可以看出,利用扩展信息滤波算法对传感器信息进行融合,是解决非线性目标跟踪的有效方法。文献[12]的方法是考虑全局状态估计的多传感器加权融合方法,并未对传感器进行选择。因此,当多传感器系统中存在性能较差的传感器时,会产生较大的量测误差,性能过差的传感器参与融合时反而会降低跟踪精度。通过比较可以看出,本文提出的基于扩展信息滤波的多传感器跟踪算法的跟踪精度与3个性能最优的传感器直接融合的跟踪精度基本一致,验证了传感器选择算法的有效性。
4 结束语
在实际跟踪及控制领域,非线性状态模型和观测模型比较常见。扩展信息滤波在非线性系统中具有很好的跟踪性能,并且融合中心计算量也相对较小。当传感器系统对目标进行跟踪时,在满足跟踪精度的要求下,需要最大化降低传感器资源的使用,本文提出的传感器选择算法在有效降低传感器使用数量的同时保证了跟踪精度,实现了对传感器资源的管理。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2018年19期)2018-11-14 02:37:02
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电子设计工程(2014年20期)2014-02-27 12:01:00
电子设计工程(2014年18期)2014-02-27 12:00:19
中国科学技术大学学报(2013年8期)2013-03-11 20:18:37