
基于四线激光雷达的无人车障碍物检测算法
2018-08-17 00:51郑正扬蔡英凤
中国机械工程 2018年15期
王 海 郑正扬 蔡英凤 陈 龙
1.江苏大学汽车与交通工程学院,镇江,212013
2.江苏大学汽车工程研究院,镇江,212013
0 引言
随着人工智能、传感器技术的不断发展,无人驾驶汽车取得了很大的进步。无人车作为轮式机器人的一种,不仅要求能实现自主安全驾驶,还需要保证乘员的舒适性。环境感知作为无人车体系结构的基础,其性能的优劣直接关系到能否达到安全驾驶的需求。环境感知常用的传感器有视觉传感器、激光传感器、惯性导航、GPS定位系统等。激光雷达由于其精度高,受环境影响较小,在无人驾驶汽车中得到了广泛应用。
目前,激光雷达数据处理主要分为两类:一种是直接基于点云的处理方式[1-2];另一种是基于栅格地图的处理方式[3-8]。栅格地图因其简单稳定,实时性好,故广泛用于无人车环境感知系统[9]。在行车过程中,一些噪声会对检测算法造成影响,所以需要对噪声进行滤除。激光雷达聚类算法是后续数据处理的基础,常用的聚类方法有基于K均值的聚类[10]、基于分层的聚类、基于密度的聚类、基于网格的聚类[11]、基于神经网络的聚类、基于统计学的聚类和高维可视化数据聚类等。在激光雷达聚类算法方面,国内外学者提出了许多方法。甘志梅等[12]采用了基于固定距离阈值的聚类方法,BORGES等[13]提出了一种根据深度值来确定距离阈值的方法。由于激光雷达出射激光束间的角度具有均匀分布的特性,传统的基于固定距离阈值聚类方式的准确性不高,聚类的质量较差,因此本文基于四线激光雷达数据,采用根据深度值来确定聚类距离阈值的方法,并通过匹配激光相邻时间帧点云数据中的障碍物块,对聚类结果进行修正。
1 激光雷达选型及坐标转换
1.1 激光雷达数据接收
本文采用了2个IBEO-LUX-2010四线激光雷达。IBEO-LUX-2010是IBEO公司借助高分辨率激光测量技术推出的一款多功能汽车智能传感器,它具有4个扫描层,最远扫描距离可达200 m,同时还可获得障碍物的高度信息。IBEO-LUX-2010可适用于大雨及灰尘等复杂环境,且结构紧凑,便于汽车的改装,具体参数见表1。IBEOLUX-2010在智能车上的扫描示意图见图1,其中扇形区域为2个四线激光雷达扫描范围。由图1可以看出,2个四线激光雷达可以比较完整地扫描无人驾驶汽车的前方区域,而汽车前方区域也是规避障碍物的重点区域。激光雷达在智能车上的安装示意图见图2。

表1 IBEO-LUX-2010激光雷达参数Tab.1 IBEO-LUX-2010 lidar parameter
在数据采集阶段,本文采用创建多线程并建立网口通信来接收不同激光雷达所采集的数据。作为客户端,需要向各台激光雷达设备发送指令,完成其安装扫描参数和接收数据模式的设置。当接收到激光雷达数据后,通过产品说明书对其进行解析。激光雷达返回的每一帧数据都包含原始激光雷达点云的距离、回波宽度、扫描线数以及障碍物的距离、速度、大小、分类等信息。最后通过解析获得本文所需要的信息。

图1 激光雷达扫描范围示意图Fig.1 Lidar scanning scope schematic diagram

图2 激光雷达安装示意图Fig.2 Lidar installation schematic
1.2 激光雷达坐标系转换
车体坐标系是以车辆后轴中心为坐标原点,车辆的前进方向为xv轴,水平向左为yv轴,竖直向上为zv轴。激光雷达临时坐标系是以激光雷达的中心为坐标原点,水平向前为xL轴,水平向左为yL轴,垂直于oxLyL面向上为zL轴。本文采用一种分层转换四线激光雷达坐标的方法[14],首先通过几何关系,将三维扫描点坐标依据扫描角度值以及扫描层数投影至激光雷达临时坐标系oxLyL,再依据安装参数将坐标转化至车体坐标系。
2 激光雷达数据预处理
处理激光雷达数据大致可以分为两种方法:一种是直接对点云数据进行处理,另一种则是先将点云投影至栅格地图,再进行预处理、距离分割及检测。前者的优点在于可以相当完整地保留障碍物的轮廓信息,对外界的环境信息丢失较少,精度较高,但是多线激光雷达扫描返回的点云数量十分庞大,对计算资源有很高的要求,直接对激光雷达点云进行处理难以保证算法的实时性;而后者会丢失部分环境信息,使目标检测性能降低,但其处理速度较快,稳定性较好,适合运用于工程中。针对智能驾驶中需要实时准确地检测周围环境中的障碍物,本文采用栅格法来对激光雷达数据进行处理。
2.1 点云数据投影
栅格地图以统一大小的网格来划分车辆周围空间。本文建立的栅格地图大小为240×400格,单个栅格大小为20 cm×20 cm,包含了车前方80 m以内以及左右各12 m以内的范围。栅格地图法需判定每个栅格属性是否是占据的。IBEO-LUX-2010雷达可直接获得剔除路面点后的障碍物扫描数据点,将其向栅格地图投影,统计每个栅格内是否包含点云投影,若存在,则此栅格置为1,表示该栅格中存在障碍物,栅格为占用状态;反之,置为0,表示此栅格不存在障碍物,为非占用状态。
2.2 栅格滤波
在智能车行驶过程中,在车前方会不可避免地出现一些小飞虫或者是落叶等小物体,如果在环境感知环节没有将这些悬空小障碍排除,可能会发生误检而导致车辆停止,这样会对行车造成严重影响。这些悬空障碍物主要满足以下特征:①车前方点云应是密集的,所以出现单个障碍栅格可能是小障碍物;②障碍物应是悬空的,且该栅格内点云高度差比较小。
本文采取如下判别依据来排除悬空小障碍物。在车前方10 m范围内,在所有被检测到的障碍物栅格中,若其同时满足下述两种情况:①周围7×7格范围内不存在其他障碍栅格;②只存在中间2根扫描线扫描到的障碍物,而顶层及底层扫描线均未扫描到障碍物,则认为该障碍物为悬空小障碍物,将其排除并更新栅格地图,以防止因误检而导致车辆停止行驶。激光雷达滤波算法应要求严格,防止出现漏检而导致汽车碰撞障碍物;同时,一些漏检情况可以通过后续的雷达跟踪算法进行滤除。栅格滤波效果见图3。

图3 栅格滤波效果图Fig.3 Grid filtering
3 数据聚类
对障碍物进行分割聚类是对其识别跟踪的基础。由于激光雷达角分辨能力固定,所以在远处雷达的角分辨能力就会降低,这会导致一个障碍物可能会分解成多个离散的小块,无法对障碍物进行正确分割,以致后期对障碍物的检测和跟踪发生错误。所以,如何对雷达的点云数据进行准确聚类,分离提取不同的障碍物,是激光雷达点云数据处理的难点。单从空间上对激光雷达数据进行分割难以满足要求,因此本文在空间聚类的基础上,通过障碍物块的匹配对结果进行修正,得到修正后的聚类结果,具体流程图见图4。

图4 聚类跟踪流程图Fig.4 The process of clustering and tracking
3.1 空间方式聚类
基于密度的聚类方法优点是能够发现任意形状的聚类;基于网格的聚类方法虽然降低了聚类精度,但减少了计算量,提升了实时性。由于在车辆周围环境建模中已经建立了环境栅格地图,故本文在处理一帧数据时采用网格聚类的方法,同时依据选取不同的距离阈值将障碍物离散的网格聚类在一起。
式(8)是土体开裂后,裂隙底部x向方向的应力表达式。当土体在距离自由边界(裂隙面)l处的σx达到土体的抗拉强度σt时,在相邻初始裂隙之间将再次开裂。实际工程中,我们关注的是裂隙最终发育的间距和宽度。由于土体的最大x向应力发生在x=0处(相邻裂隙的中间位置),将x=0代入σx,并令σx=σt,有:
二值连通区域标记算法[15]广泛应用于计算机图像处理。在区域标记算法中,通过模板比较当前网格与邻域网格中像素是否相同,若相同,则将这些网格作为一个类连通在一起。邻域四连通及邻域八连通标记算法的模板见图5。

图5 四连通及八连通标记算法Fig.5 Four-connected and eight-connected labeling algorithm
本文所提的聚类算法即为在普通区域标记算法的基础上,通过给定不同的距离阈值DT,求得栅格聚类阈值为栅格尺寸大小表示向下取整。扩展连通区域至(2NT-1)×(2NT-1)大小,将此障碍物栅格对应扩展区域范围内的障碍物栅格点聚类为同一个障碍物,这样就能有效地将障碍物离散的部分归为同一类。图5b为扩展至5×5格大小区域示意图,在障碍点周围5×5格范围内存在其他障碍物点,就将其赋值为相同标记号。所以本算法最重要的是需要计算出基于各个已知障碍点的聚类距离阈值DT。
SKRZYPCZYNSKI等[16]和甘志梅等[12]采用固定距离阈值的方法完成障碍物聚类;考虑到激光雷达的数据特点,障碍物不同角度的外部轮廓扫描点的距离阈值应不同,周俊静[17]提出了一种自适应阈值的聚类算法。BORGES等[13]提出了一种根据深度值来确定距离阈值DT的方法,见图6。DT的计算表达式如下:

式中,rn-1为前一点的深度值;σr为激光雷达的测量误差;Δφ为激光雷达的角度分辨能力;λ为阈值参数。

图6 文献[13]提出的距离阈值计算Fig.6 Calculation of distance threshold from literature[13]
由式(1)可知,DT的值取决于阈值参数λ,因此应严格选择阈值参数,避免出现当2个障碍物的距离过近时,将两者检测为同1个物体而合并成1个障碍物,从而导致出现欠分割的情况。最终,得到了1张标注后的栅格地图。在标注地图中,属于相同障碍物块的网格标注为同一数字。采用上述聚类算法的优点在于:①符合激光雷达出射激光束间的角度具有均匀分布的特性,远处障碍物离散的部分也能较好地聚类在一起;②避免改变障碍物块的轮廓,导致其形状特征的改变。
3.2 聚类修正
在经过空间方式聚类之后,由于距离阈值参数选择较严格,离本车较远或呈一定扫描角度的属于同一障碍物的障碍物块仍可能没有聚类在一起,从而造成过分割,因此本文提出了一种匹配聚类修正算法。首先通过最近邻域跟踪算法,寻找k-1时刻与k时刻空间聚类结果中距离最近的障碍物块i,将其配对得到匹配后的障碍物块列表Oclu。障碍物信息包含障碍物块中心位置、速度、运动方向、回波脉冲宽度均值等参数,计算表达式如下:
式中,(xi,k,yi,k)、(xi,k-1,yi,k-1)分别为k时刻和k-1 时刻第i个障碍物块的中心坐标;Ti,k、Ti,k-1分别为k时刻和k-1时刻第i个障碍物块的激光回波脉冲宽度均值;ΔT为两帧数据时间差,vi为障碍物块的速度;θi为障碍物块的运动方向;Ti为两匹配障碍物块的激光回波脉冲宽度均值。

其中,a、b、c、d 4个权重值及相似度阈值ST均由实验测得。遍历整个障碍物块列表之后,合并障碍物块,得到障碍物列表Otrack。并将k时刻障碍物列表与k-1时刻障碍物列表进行匹配跟踪,完成后续的目标跟踪预测。
4 实车实验与结果分析
为验证上述障碍物检测算法的准确性和有效性,对无人驾驶汽车在真实道路上获取的数据进行分析。实验平台为江苏大学自主研发的智能驾驶汽车平台,搭载了有IBEO-LUX-2010的四线激光雷达,同时使用行车记录仪记录了当前场景的视频信息,实验地点为苏州某高架道路。
将本文算法与上文提到的固定距离阈值下的八连通区域标记算法进行了对比,通过对263组目标车辆进行实验分析,障碍物目标的聚类分割准确率见表2。本文算法在距本车50 m范围内的聚类效果较好,能达到80%以上;但在更远处,由于参数选取较为严格,聚类效果变差。而八连通区域标记算法的聚类效果随着目标距离的增加,聚类效果显著变差。
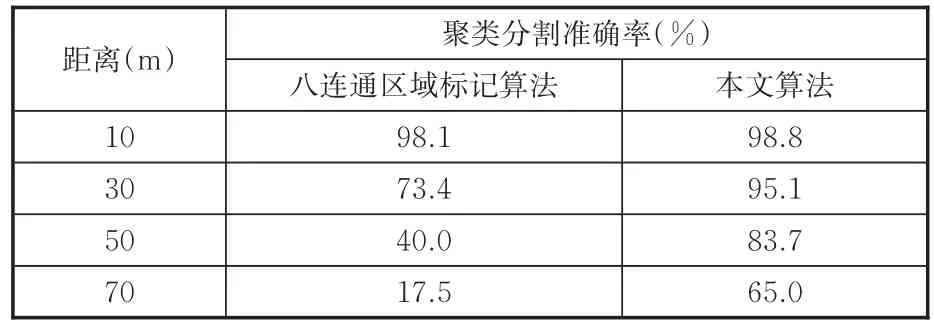
表2 聚类算法比较Tab.2 Comparison of clustering algorithms
图7为障碍物检测结果对比图,其中第一列为采用传统八连通区域标记算法聚类获得的障碍物图像,第二列为采用本文基于聚类分割算法所检测到的障碍物图像,第三列为行车记录仪视频信息,矩形框为障碍物的最小包含矩形框。

图7 障碍物检测结果Fig.7 Obstacle detection results
在场景1(图7a)中,本文算法能够完整地获得前方两车的外部轮廓,并未出现过分割现象,其中1车距本车48 m左右,2车距本车56 m左右。而使用传统八连通区域标记算法时,1号车被分割成6个部分,2号车被分割成5个部分。由图7a可以看出,在检测较远距离的障碍物时,激光雷达返回的数据点投影至栅格地图时,得到的已经不是连续的栅格,而是离散的。采用本算法后,可以将这些离散的网格点重新聚类为一个障碍物块,而不会发生过分割现象,得到了比较完整的障碍物轮廓点,可为接下来的障碍物识别与跟踪环节提供帮助。在场景2(图7b)中,1号障碍物为靠近本车的白色商务车,因其离本车较近,扫描点较密集,故2种算法均能得到完整的障碍物轮廓;2号障碍物为距本车28 m左右的黑色轿车,使用传统八连通区域标记算法时,被分割成3个部分;3号障碍物为距本车36 m左右的红色轿车,被分割成6个部分,离散程度随距离越远越严重。而本文算法能将离散部分聚类在一起。同样在场景3(图7c)中,由近至远存在4个障碍物车辆,使用传统八连通区域标记算法时,分别被分割成3、2、4、3个部分,而本文算法也能将离散部分聚类在一起。
5 结论
(1)提出了一种采用四线激光雷达的障碍物检测方法,通过多种手段,保证了障碍物选取的有效性。
(2)在数据预处理阶段,将点云数据向栅格地图投影,并通过多条件判断将悬空小障碍物进行滤除。
(3)在聚类过程中,提出了一种网格聚类与密度聚类相结合的方法。根据激光雷达扫描特性,通过深度值来确定距离阈值,并转化为栅格聚类阈值,最后通过相邻帧障碍物块的匹配对聚类结果进行修正。
(4)从实验结果中可以看出,该方法能准确地完成障碍物的检测工作,滤除噪声并减少了过分割现象的发生。后续研究将通过识别环节对障碍物离散的不同部分进行聚类,进一步提高检测的准确性。
猜你喜欢
北京测绘(2022年5期)2022-11-22
科技创新与应用(2021年31期)2021-11-09
汽车观察(2021年8期)2021-09-01
中北大学学报(自然科学版)(2020年4期)2020-07-13
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
弹箭与制导学报(2015年1期)2015-03-11
