自动驾驶汽车测试评价方法体系研究
2018-08-16 07:25:22吴海飞宋雪松
质量与标准化 2018年5期
文 /吴海飞 宋雪松 曹 寅
自动驾驶汽车作为解决道路安全、交通拥堵等问题的终极方案,其意义不仅在于汽车产品与技术的升级,更有可能带来汽车、相关产业格局和价值链体系的重塑,已经成为了中国、美国、日本和欧洲等国家和地区的未来发展战略。
各企业争先恐后推出的自动驾驶汽车是否满足道路安全要求?对解决交通拥堵又有多大收益?该如何对自动驾驶汽车进行评价?目前没有一套成熟的测试体系。
一、自动驾驶汽车测试标准体系现状
1. 国内外自动驾驶汽车标准体系战略介绍
现阶段,高级别的自动驾驶相关标准尚未出台,主要国家和国际组织的标准、法规仍以高级驾驶辅助系统(ADAS)功能类标准为主。国际标准化组织(ISO)已经将自动驾驶汽车相关标准、法规协调作为重点工作,目前已发布的相关标准主要有ISO 17361-2017《智能运输系统—车道偏离预警系统—性能要求及试验方法》和ISO 22178-2009《智能运输系统—低速跟随行驶系统—性能要求及试验方法》等。世界车辆法规协调论坛(WP29)也设立了ITS/AD非正式工作组,于2017年3年启动了自动紧急制动系统(AEBs)与自动转向控制功能(ACSF)法规制定工作,在原有的制动和转向控制标准(ECER131、ECER79)中进行修订,计划在2018年提交法规草案。
2017年12月,我国制定了《国家车联网产业标准体系建设指南》,旨在指导智能网联汽车标准化工作,加快构建包括整车、关键系统部件功能安全和信息安全在内的智能网联标准体系,并逐步形成统一、协调的国家车联网产业标准体系架构。2018年1月,国家发展和改革委员会发布了智能汽车创新发展战略征求意见稿,把构建系统完善的智能汽车法规标准体系作为一项重要战略任务,通过健全法律法规、完善技术标准、推动认证认可等措施来推动智能网联汽车产业发展。
2. 我国自动驾驶标准体系建设
中国汽车标准化技术委员会智能网联汽车分技术委员会于2018年4月成立,分标委下设立ADAS、汽车信息安全和自动驾驶三个标准工作组以及国际协调专家组。标准体系建设方面,计划到2020年,初步建立能够支撑驾驶辅助和低级别自动驾驶的智能网联汽车标准体系,制定30项以上智能网联汽车重点标准,涵盖功能安全、信息安全和人机界面等通用技术和信息感知与交互、决策预警和辅助控制等核心功能相关的技术要求和试验方法;到2025年,将建成能够支撑高级别自动驾驶的智能网联汽车标准体系,制定100项以上智能网联汽车标准,涵盖智能化自动控制、网联化协同决策技术以及典型场景下自动驾驶功能与性能相关的技术要求和评价方法。目前,已开展的标准制定计划包括自动紧急制动系统(AEB)、车道保持辅助系统(LKA)、盲区监视系统(BSM)和自动泊车系统等。
除了国家标准,2017年10月,上海市成立了智能网联汽车和应用标准工作组,以推进智能网联汽车地方标准的先行先试。第一批研究制定的相关标准包括:《智能引导、充电停车库和管理系统技术规范》《基于上海道路环境的车辆车道盲区监控系统性能要求及测试方法》《基于上海道路环境的车道偏离预警系统性能要求及测试方法》等。
二、自动驾驶测试评价挑战分析
1. 安全性评价挑战
安全性的评估主要涉及交通事故。据统计,90%的传统汽车交通事故是驾驶员操作错误造成的,而自动驾驶则是通过机器代替人类驾驶,不会产生疲劳、分心,可以显著降低由于操作错误产生的交通事故。但是,目前自动驾驶系统的技术还不够成熟,社会体系的融入问题依然没有解决。因此,也会带来新的、甚至更加严重的危险,比如复杂的天气和交通环境、信息安全以及自动系统故障等风险。无论自动驾驶技术多么成熟,都无法避免事故的发生,那么,自动驾驶汽车究竟需要多么安全才能投放市场?
根据美国DOT数据,在美国,每行驶1亿公里,因交通事故受伤的有77人,死亡1.09人。因此,为了证明自动驾驶汽车也具备每1亿公里1.09死亡人数的水平甚至更高,需要几亿公里甚至几十亿公里的道路测试和非常高的时间与金钱成本;再者严苛的工况在道路测试中可遇不可求,即使遇见了也无法进行重复验证。道路交通事故测试场景需能够体现出实际交通环境下的高危场景。那么,以人类驾驶历史交通事故信息为基础构建相应的测试场景,理论上应该可以缩短道路测试的里程。但是,就算自动驾驶车辆遍历了人类驾驶历史交通事故场景,也不能从根本上解决自动驾驶的安全性问题;自动驾驶汽车不存在醉酒、分心和疲劳,而这些因素占所有事故原因的50%以上。所以,事故场景中有一大部分场景对自动驾驶是没有意义的。
自动驾驶安全测试面临的更大挑战是随机情况处理能力测试,比如道路环境问题、信息安全问题和系统故障问题等都是随机并且不可预知。
2. 高效性评价挑战
高效性评价主要涉及单车、路口、某条走廊或者区域内的交通移动表现,包括用户使用的便捷性和到达目的地的效率等。
很显然,自动驾驶汽车在解决员工通勤时间长的问题上具有非常好的应用前景,它可以完美地解决最后一公里的出行问题,用户无需亲自停车,也不用走去停车场;通过自动驾驶汽车构建的智能交通,以云平台控制,从而提高区域的交通效率。虽然自动驾驶汽车在降低交通事故的同时必然可以减少拥堵,但是自动驾驶功能在一定条件下同样会影响交通效率。比如:自动跟车功能可能会设置一个较长的跟随距离,这可能会提高其安全性,但也会降低车道的通过量。
单车的测试往往不能全面地评价自动驾驶汽车效率,还应评估一组自动驾驶汽车在一定的周期内对某个区域交通效率的影响,这就需要一个非常复杂的现实或者虚拟的交通模型。自动驾驶汽车与非自动驾驶汽车混合驾驶的时期,评价会变得更复杂。目前,比较常用的区域交通效率指标(平均出行时间、出行指数等)会随着自动驾驶汽车技术的发展而不断地发生变化,比如出行更方便,人们会有更强的意愿去更远的地方,更频繁的出行,从而再次影响区域交通效率。
3. 舒适性评价挑战
舒适性的评价主要涉及驾驶员或者乘员的驾乘体验。传统汽车舒适性评价主要通过人体总的振动加速度与主观感觉来判断舒适性。这一评价内容只是自动驾驶汽车舒适性评价中的一部分;评价的另一部分内容是驾驶员或者乘员对于自动驾驶系统本身的感受,包括加速、刹车、转向、换道以及人机交互等。
不同国家、不同区域的用户由于驾驶习惯的不同,对待同一自动驾驶功能的主观感受也会不同。如,欧美开发的前方碰撞预警(FCW)系统报警碰撞时间(TTC)通常为2.5 秒,这里抛开安全性考虑,2.5 秒以上的跟车时距在欧美是能够被接受的,但这功能很可能会被大部分国内用户关闭,因为我国驾驶员的习惯跟车距离往往比该限值近得多。
因此,驾驶员行为模型对自动驾驶舒适性评价显得尤为重要,而要建立一个基于舒适性评价的驾驶员模型本身就是一个挑战。随着自动驾驶技术的发展,驾驶员的驾驶行为也会不断变化,驾驶员模型需不断地进行迭代。当车辆不再需要驾驶员时,用户作为乘员的身份对跟车距离、变道时机等因素可能不再关心,但会更关注人机交互、娱乐系统等因素。
三、自动驾驶汽车评价框架
通过以上分析可以得出,自动驾驶汽车评价是一个体系,任何一种单一测试方法都无法得到一个较为全面的结果。另外,该体系还必须是持续灵活的,随着自动驾驶技术的发展而不断地进行更新迭代。
本文提出的评价框架(见图1)是以数据库为基础,通过筛选逻辑确定虚拟测试、场地测试和公共道路测试之间的场景比例,三种测试方法之间相互补充,对自动驾驶汽车进行更全面的评价。在安全性评价内容中还应增加故障注入和系统风险分析等手段,有针对性地评价自动驾驶汽车的随机事件处理能力、网络安全性和故障处理能力。
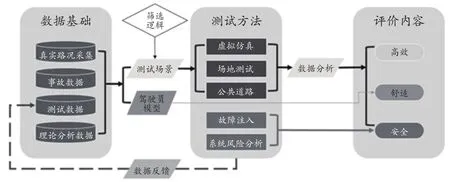
图1 自动驾驶汽车评价框架
框架中筛选逻辑以由简单到复杂为原则,如场景覆盖单车单车道、多车单车道、多车多车道、路口、带信号灯路口、快速走廊和区域交通场景等,可以从微观到宏观层面全面评价一辆或一组自动驾驶汽车。安全性评价、高效性评价和舒适性评价之间的筛选逻辑也不应完全相同,安全性注重单车、短时间内的系统性能;高效性注重的是多车、区域内、长周期内的性能表现。根据测试数据采集类型的不同,其虚拟仿真模型也完全不同,如舒适性评价应加入人类驾驶员模型进行对比。
框架中的数据基础、筛选逻辑以及测试方法都是持续灵活、不断迭代的。测试评价指标涵盖多空间、多时间维度,不仅可以评价自动驾驶汽车单场景单次的测试性能表现,也应该能评价多车、长周期内的性能表现。
四、总 结
自动驾驶的实现需要集汽车、信息通信、交通甚至人工智能等多领域技术,加上无法穷举的随机工况,自动驾驶汽车测试评价面临着极大的挑战。对此,本文归纳出一个评价框架,该框架以数据库为基础,通过多手段、多空间维度和多时间维度可以对自动驾驶汽车的安全性、高效性以及舒适性进行评价。该框架目前还只是初步研究阶段,后续需进行一系列的细化与验证,才能更好地应用到产品开发与标准研究中。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
工业经济论坛(2020年6期)2020-04-13 00:38:20
汽车观察(2018年12期)2018-12-26 01:05:26
汽车观察(2018年10期)2018-11-06 07:05:20
建筑热能通风空调(2018年5期)2018-07-09 03:16:38
池州学院学报(2017年3期)2017-10-16 01:38:35
公民与法治(2016年4期)2016-05-17 04:09:26
消费者报道(2016年3期)2016-02-28 19:07:32
现代制造技术与装备(2015年4期)2015-12-23 10:20:22