
篮球机器人命中率改良方法在播种机漏播中的应用
2018-08-10 10:58:16易礼舟
农机化研究 2018年9期
易礼舟,戴 彬
(1.重庆能源职业学院,重庆 402247;2.重庆房地产职业学院,重庆 401331)
0 引言
随着一代一代农民对播种技术的改良,现代农业的播种方式和工具都发生了巨大变化。传统的刀耕火种已转变为效率高、作业精准的条播机、穴播机和精播机。但是,无论是哪一种播种机都必须要配备排种机构,排种器作为播种的重要装置,其性能显得尤为重要。因此,本文结合播种机作业特性,将正态云模型篮球机器人命中率改良方法应用于播种机漏播检测中,大大降低了播种机的漏播率,提高了播种效率。
1 正态云模型的概述
在人类的社交活动中,语言是最基本也是最重要的思维方式,云模型从基础的语言值着手,是将语言描述的原理概念转化成确定值的一种模型。云模型对于确定原理概念的不确定性主要包含随机性和模糊性两种,这两方面的概念和原理可以在云模型中形成相互映射。
定义1 :假设U是可以用确定值表示的定量域,C是U上的概念常量值,则x∈U可以看成是C的某次随机值,那么x和C之间的确定度可以由μ(x)∈ [0,1]来表示,即
μ(x):U→[0,1]
(1)
那么,对于任意一个随机值∀x∈U,可以表示为
x→μ(x)
(2)
其中,x在U上集合称作为云,可以记成C(X);x的独立个体则称为云滴。
定义2 :随机变量X服从位置、尺度参数分别为μ和σ的概率分布,其概率密度函数表达式为
(3)
其中,X为正态随机变量,其满足正态分布,可以用X~N(μ,σ2)表示。当μ=0,σ=1时,就称其为标准正态分布,其表达式为
(4)
正态云模型分布如图1所示。
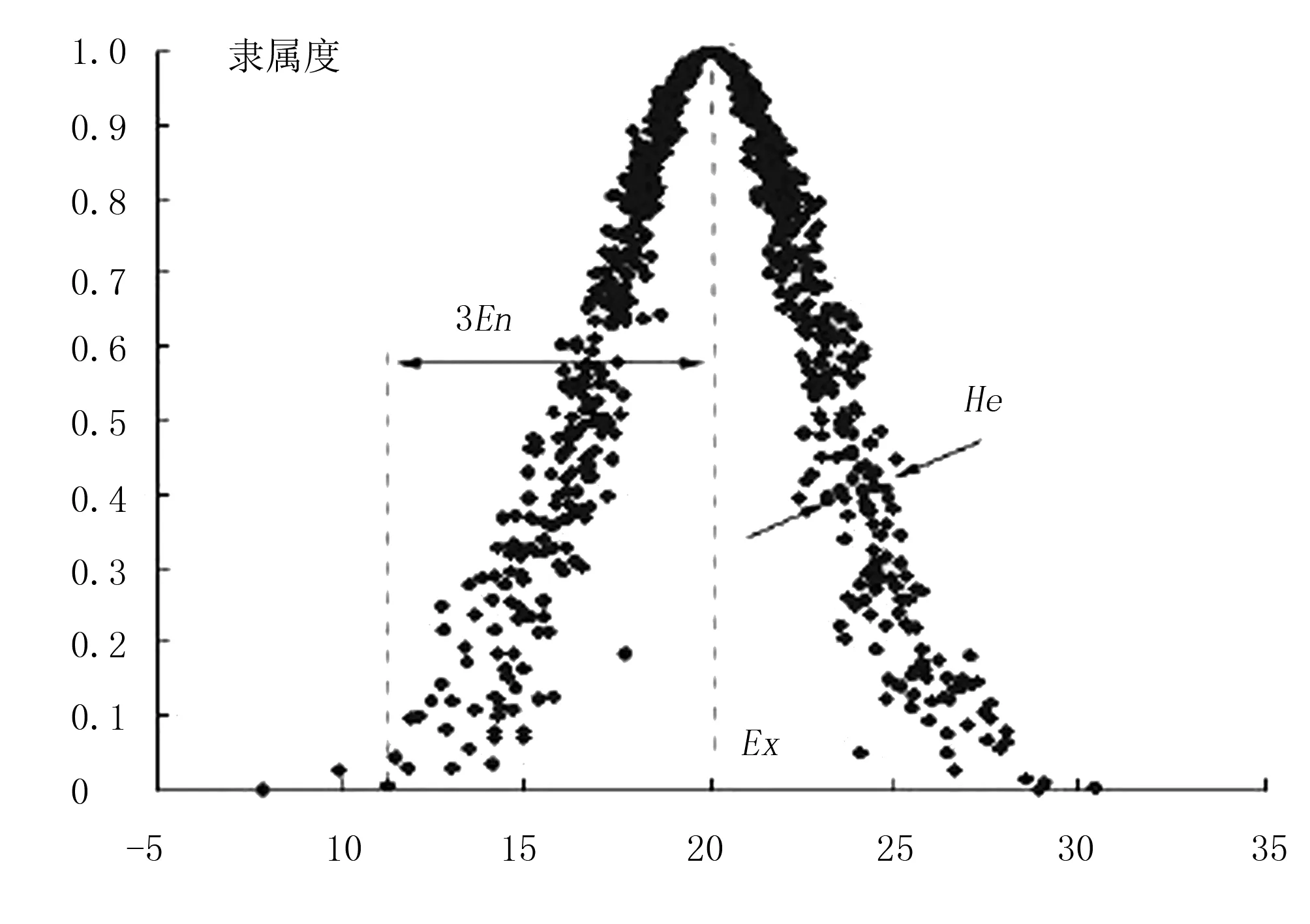
图1 正态云模型分布图
2 正态云模型篮球机器人命中率改良方法
2.1 篮球机器人投篮数学模型
在设计篮球机器人的过程中,往往是单台制作,而不是在车间流水线上批量生产,会造成每台机器人的身高不一样。因此,投篮机器人的出手高度也会存在一定的差别。另外,每台机器人投出篮球时的出手角度和初始速度都是不一样的,球在空中的曲线也是不一样的。
标准篮球直径d为24.6cm,而篮圈直径D为45cm,篮球最大的横切面面积只占篮圈面积约30%,篮圈的高度H为3.05m,三分球线与篮圈之间的距离L=4.60m。假设篮球被投出时的高度为hm,初始速度为v0,出手角度为α,则可以建立机器人投篮过程的数学模型,如图2所示。

图2 机器人投篮过程的数学模型示意图
如图2所示,可以建立篮球初始运动方程为
(5)
联立之后可得篮球在从投出到落到篮圈的整个运行过程的表达式为
(6)
从模型示意图来说,篮球命中的必要条件是:x=L时,y=H-h。但是,若想篮球准确命中,要需要将篮框边的阻碍作用进行分析考虑,即篮球的入框角度要大于一定值,该部分的条件为
Dcos(90°-β)≥d
(7)
当x=L时,有表达式为
(8)
将式(6)和式(8)联立可得
(9)
2.2 采用正态云模型改良投篮命中率
由于篮球机器人在投篮过程中会出现一些不确定因素影响其命中率,现采用正态云模型对其进行优化改进。正向云发生器是一种将特定概念转换为相应数量值的转换模型,可以根据云模型确定的数字特征得到云滴的正态云分布图。
正态云分布图的实现过程是根据已知的期望Ex、熵En和超熵He等信息,设定需要计算的云滴数N,然后求出N个定量论域坐标点,在相对的定量位置和概念确定概率分布程度。正向云发生器原理如图3所示。
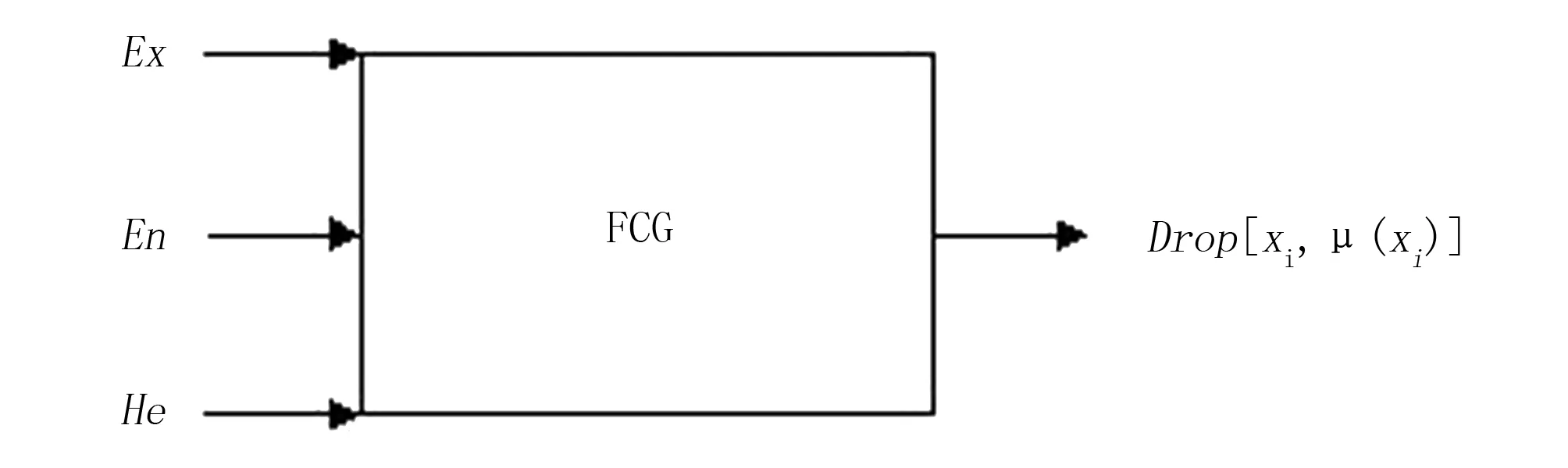
图3 正向云发生器原理图
正向云模型发生器记为FCG,算法初始参数设置为:
1)输入参数,Ex,En和He等初始信息;
2)输出结果,生成n个云滴drop(xn,μ(xn))。
正态云模型发生器具体实现流程如图4所示。

图4 正态云模型发生器实现流程图
3 篮球机器人命中率改良方法在播种机漏播中的应用
3.1 播种机漏播检测系统
1)播种机漏播检测系统硬件部分设计。播种机漏播检测系统硬件部分的设计是整个系统的核心,能够实现多传感信号的采集、处理和控制等,主要包括漏播、排种量、测距、转速传感器电路、调理电路和电机驱动电路等。漏播检测系统硬件框架如图5所示。
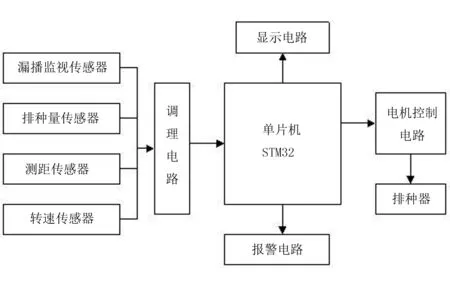
图5 漏播检测系统硬件框架图
系统采用光电式传感器获取播种脉冲信号,然后结合调理电路对其进行处理,最后由STM32单片机内部时钟对信号进行计算处理,得出播种合格率。另外,在实际运行中,系统安装3对光电传感器,大大提高了检查准确率。
在播种过程中,设计了一种播种口获取播种信号量的检测器,如图6所示。该光电传感器处理电路AD口直接与STM32的外部中断引脚相连接,当没有播种的时候,光电传感器处理电路为低电平;当播种的时候,光电传感器高电平,三极管开关电路闭合,外部中断引脚被拉高,单片机可以捕捉到该脉冲信号作为播种的计数值。

图6 获取播种信号示意图
2)播种机漏播检测系统软件部分设计。STM32在上电后,首先进行初始化操作,然后运行main()主函数,在主函数调用各个子程序模块。检测系统软件主程序如图7所示。STM32在进行初始化过程中,主要会进行以下一系列的操作:①初始化单片机时钟信号、系统中断、设置CPU运行速度和堆栈指针SP,初始化RAM以及进行简单的LED初始化;②初始化信号输入控制芯片、串口、检测系统内存映射以及结束系统准备工作;③使能定时器、计数器和外部中断。

图7 检测系统软件主程序流程图
CPU进行初始化后,接着就是调用播种信号量的检测采集电路和信号调理程序;将光电传感器采集的播种脉冲值,经过简单处理后送给单片机,获得播种机漏播系统的各项性能指标;进一步跳用LED子程序,将播种机的各项性能实时显示出来;调用报警子程序,当播种机漏播检测系统出现漏播重播的时候,进行报警。主程序的部分代码如下所示:
int main(void)
{
SystemInit();
课程教学资源库的建设是一个持续的、长期的建设工程,随着造船技术、焊接技术的不断更新和发展,更多资源需要开发与更新,课程资源库也需要动态的持续更新。
GPIOInit();//
Enables clock for GPIO
LPC_IOCON->PIO0_1 &= ~0x07;
LPC_IOCON->PIO0_1 |= 0x01; /* CLK OUT */
SysTick_Config(48000);
SPI_IOConfig(0);
NVIC_SetPriority(SSP0_IRQn, 1);
OLED_Init_I();
UARTInit(115200);
NVIC_SetPriority(UART_IRQn, 2);
}
3.2 命中率改良方法在漏播中的应用
在实际播种的过程中,播种的准确率与播种机运行速度v0,播种角度α,播种机与地面的高度h有关,每次由于播种机的震动程度不一样,播种的准确率也会有一定的影响。本章节将引入篮球机器人投篮数学模型,根据v0、α和h对播种机准确率进行测试,测试过程中,取h=1.21m和v0=8m/s计算命中率。测试流程如图8所示。
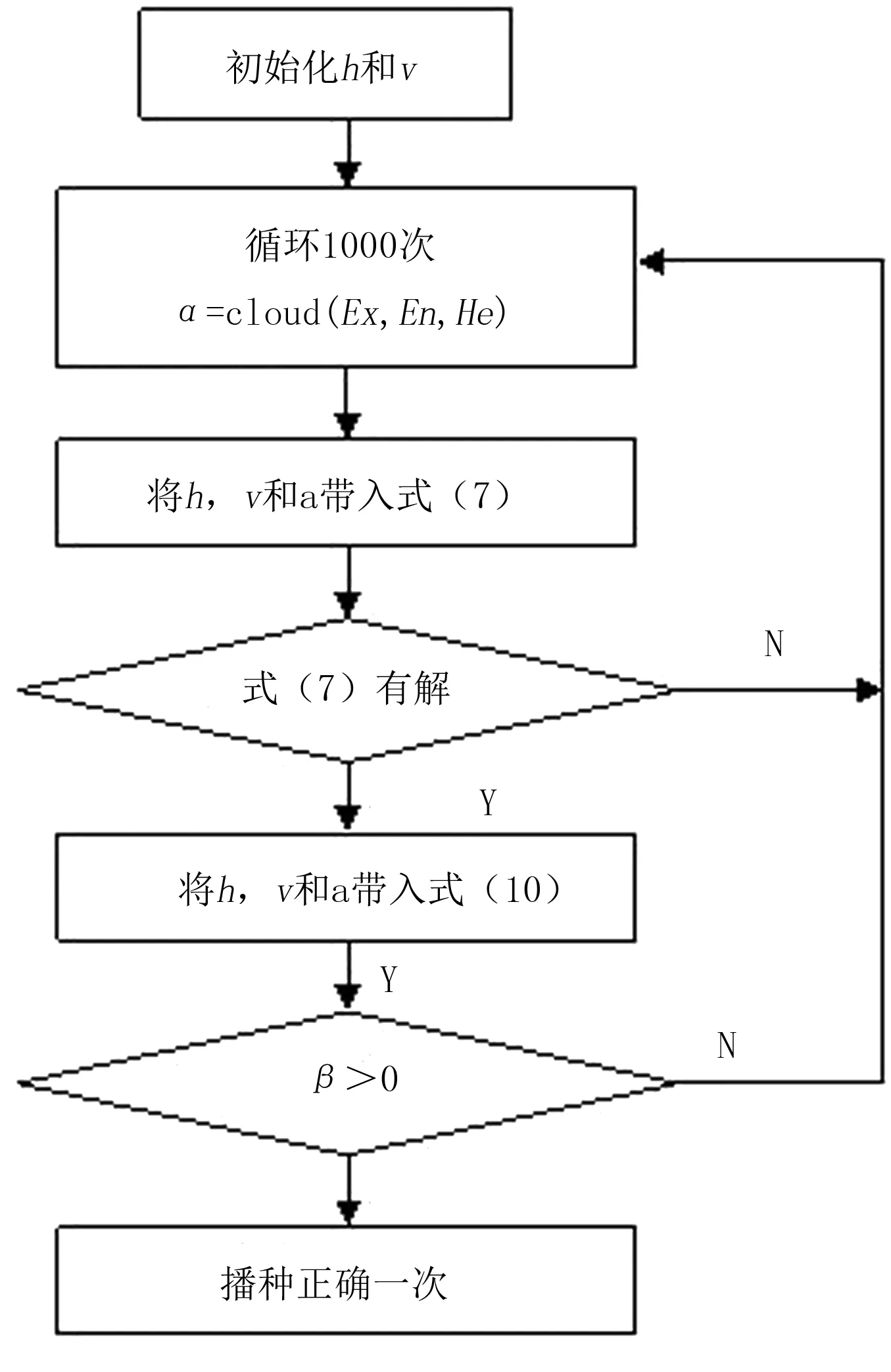
图8 测试流程图
4 试验结果与分析
为了保证播种机漏播检测系统的可行性和有效性,安装光电传感器模块的要求有:
1)精确安装,保证光电检测器的发射管和接收管准确对接;
2)安装3对光电发送接收传感器,并且要求种子再通过的时候可以完全挡住对管,能够触发单片机外部中断。
本文将正态云模型篮球机器人命中率改良方法在免耕播种机上进行实际的检测试验,免耕播种机安装如图9所示。
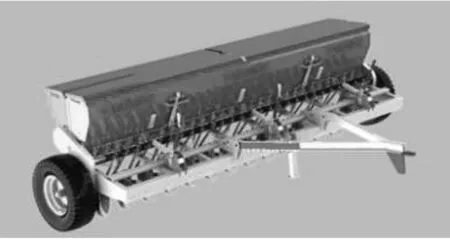
图9 免耕播种机示意图
此播种机采用条播的方式,种子从输种管落下形成一条种子流,试验过程中,每次进行播种检测试验1 000次,并重复3次,结果如表1所示。
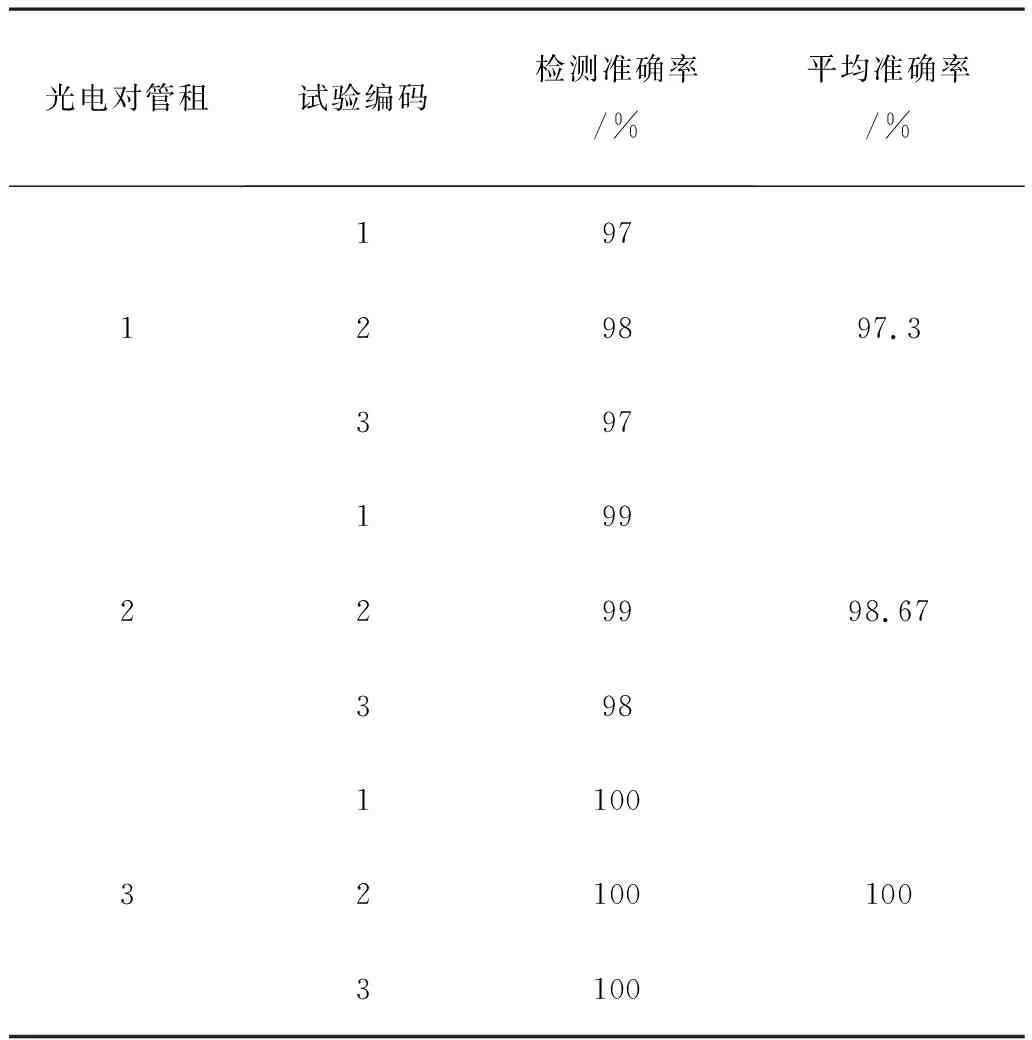
表1 免耕播种机实验结果表
由表1可以看出:当只采用1对光电管来检测种子信号时,平均准确率为97.3%;当只采用2对光电管来检测种子信号时,平均准确率为98.67%;当只采用3对光电管来检测种子信号时,平均准确率为100%。试验说明:采用3对光电管检测漏播率为0,证明了正态云模型篮球机器人命中率改良方法能够很好地应用在免耕播种机中,且能够大大降低漏播率。
5 结论
首先分析了正态云模型的特点、原理,然后介绍了正态云模型篮球机器人命中率改良方法,接着设计了播种机检测系统,并将篮球机器人命中率改良方法成功应用与播种机漏播检测中,最后进行了实际的测试。试验结果表明:采用3对光电管检测漏播率为0,基本上能满足实际要求,证明了正态云模型篮球机器人命中率改良方法在免耕播种机应用的有效性、准确性和可行性。
猜你喜欢
河北农机(2021年9期)2021-12-07 17:00:34
农业与技术(2019年9期)2019-05-28 09:23:40
中国生殖健康(2019年11期)2019-01-07 01:27:44
长江丛刊(2018年31期)2018-12-05 06:34:20
NBA特刊(2017年8期)2017-06-05 15:00:13
统计与决策(2017年2期)2017-03-20 15:25:23
农业现代化研究(2016年5期)2016-10-27 08:11:11
电测与仪表(2016年15期)2016-04-12 00:30:58
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:14
湖北农业科学(2015年3期)2015-04-07 14:24:02
