
气吹式落地红枣捡拾装置的设计与运动仿真
2018-08-10 10:58潘俊兵刘玉冬张志元
农机化研究 2018年9期
潘俊兵,刘玉冬,丁 凯,张志元,付 威
(1.石河子大学 机械电气工程学院,新疆 石河子 832003;2.新疆生产建设兵团农业机械重点实验室,新疆 石河子 832003)
0 引言
红枣在我国的栽培历史达7 700年之久[1],其最早生长在黄河中下游地区[2],是一种营养价值丰富[3-4],药用价值极高的林果[5-6]。枣树对环境的适应性强,可在贫瘠土壤中生长[7-8],对于改善生态具有积极意义。目前,我国红枣种植面积和产量均居全球第一[9-10],据统计,截止2015年底,我国红枣种植面积已超过298万hm2[11]。其中,新疆红枣种植面积已超过51万hm2,产量超过300万t[12],已成为我国红枣主产区之一,其红枣主要种植模式为矮化密植模式[13]。
目前,新疆红枣主要人工敲打枣树枝,树上红枣振落,再由人工进行捡拾。另外,红枣在收获期经霜打可提高其品质和口感。因此,新疆枣农经常在降霜之后开始采收红枣,进入采收期的红枣含水率逐渐降低,当红枣含水率降低至40%~60%将自然掉落。经调研,采收期落地红枣占红枣总产量的30%~60%,目前落地红枣的收获以人工捡拾方式为主,人工捡拾效率低、成本高,难以满足新疆落地红枣捡拾需求,落地红枣的机械化采收成为必然趋势。目前,研发的落地红枣捡拾机械主要有气吸式和机械式两种,气吸式落地红枣捡拾装置容易堵塞吸枣管[14],机械式落地红枣捡拾装置在高低不平地面上捡拾效果差[15-17]。
本文针对落地红枣捡拾难题,设计出一种气吹式落地红枣捡拾装置,为落地红枣捡拾机的设计提供理论依据和技术支撑。
1 结构组成及工作原理
1.1 结构组成
本气吹式落地红枣捡拾装置主要由进风管、旋转风管、装有毛刷的输送装置及集枣箱等组成,如图1所示。
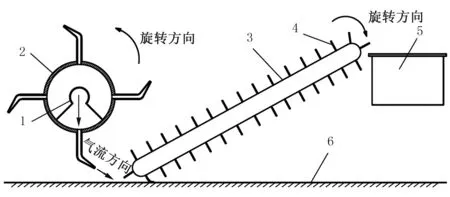
1.进风管 2.旋转风管 3. 输送装置 4.毛刷 5.集枣箱 6.地面
本装置采用气流吹枣的方式对红枣捡拾,可适应高低不平地面,解决了机械式捡拾装置无法捡拾高低不平地面上红枣的缺点。由于采用气流捡拾,本捡拾装置的伤枣率远低于机械式捡拾装置伤枣率;气吸式红枣捡拾装置效率较低且进入风管的杂质容易堵塞吸枣管、损坏风机,对风机性能要求高;气吹式捡拾装置解决了该问题,提高了捡拾效率。
1.2 捡拾装置结构设计
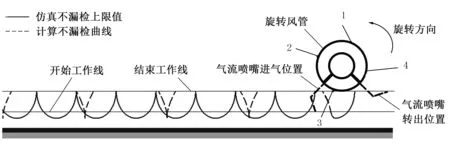
本捡拾装置主要由装有避风装置的进风管和旋转风管组成,旋转风管周围有4列气流喷嘴,相邻两列气流喷嘴间的夹角为90°(见图2),工作时与风机、输送装置等配合使用。其尺寸主要参照红枣矮化密植种植模式确定,结构尺寸如表1所示。
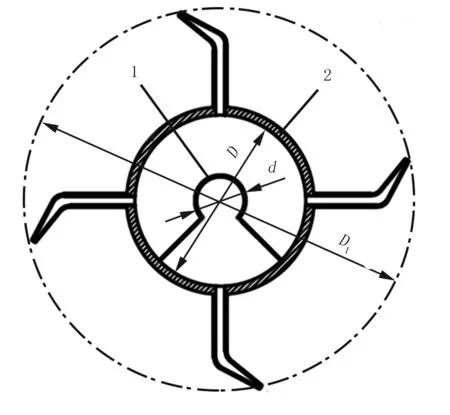
1.进风管 2.旋转风管
项目尺寸/mm旋转风管外轮廓直径D1443.5旋转风管内径D210进风管直径d90旋转风管长l1520
1.3 工作原理
工作时,从风机吹出的高速空气流进入进风管,气流在进风管内部90°区域聚集(称为气流区);同时,旋转风管开始转动,当旋转风管上的气流喷嘴管旋转至进风管气流区时,气流沿着气流喷嘴吹出,吹动地面的红枣滚向后方的捡拾输送装置,在气流和输送装置上毛刷的共同作用下(在旋转风管的转动过程中,气流喷嘴吹出的气流可将红枣吹起),将地面红枣送至输送装置上,经输送装置输送至集枣箱,完成落地红枣捡拾。
在前一列气流喷嘴转出进风管气流区的过程中,后一列气流喷嘴转入气流区,且前一列气流喷嘴进口端转出气流区的面积与后一列气流喷嘴进口端转入气流区的面积相等,可保证进风管内部气流压力稳定。
2 捡拾装置运动分析
2.1 捡拾装置运动分析
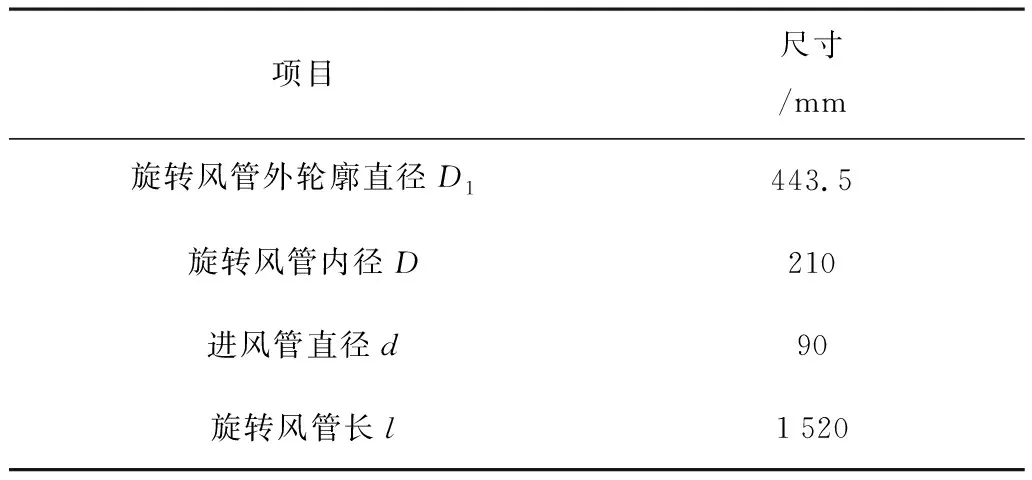
工作过程中,旋转风管的运动过程可看作是旋转风管绕其中心轴线的旋转运动和沿着工作方向水平运动的合成。对旋转风管建立直角坐标系,且其中一个气流喷嘴出口转动到坐标原点,作为初始位置,如图3所示。
(a ) 速度v=0时运动简图 (b ) 速度v=v0时运动简图
研究表明[18]:以气流喷嘴出口位置为研究对象,在时间t内旋转风管转过α角;当旋转风管沿着工作方向水平速度(后文简称为“水平速度”)为0时,气流喷嘴从坐标原点转动到C点,如图3(a)所示;当旋转风管水平速度为任一速度v时,气流喷嘴从原点转动到D点,此过程可看作图3(a)过程沿着工作方向水平移动vt距离,如图3(b)所示。此过程的位移方程为
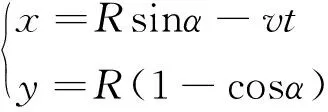
(1)
则气流喷嘴以任一水平速度v的运动位移可用式(2)表示,即
(2)
(3)
式中v—沿工作方向水平移动速度(m/s);
ω—旋转风管转动角速度(rad/s);
t—任一时间段(s);
α—旋转风管在时间t内转过的角度(rad);
R—旋转风管外轮廓圆弧半径(mm);
D1—旋转风管外轮廓圆弧直径(mm)。
方程(2)表示的曲线为旋轮线,即工作过程中气流喷嘴的运动轨迹为旋轮线,有利于气流将红枣吹起。
2.2 气流喷嘴连续工作条件分析
漏捡率是评价落地红枣捡拾机械性能的重要指标,漏检率越低,则该装置的捡拾性能越好。为了降低本装置漏捡率,气流喷嘴在捡拾区域内必须连续工作,不存在漏吹区域。
工作过程中,气流喷嘴随旋转风管转动的同时,沿着工作方向水平移动,因此气流喷嘴的水平运动与旋转运动的合理匹配,是气流喷嘴在捡拾区域连续工作的主要因素。为了保证气流喷嘴在捡拾区域连续工作,在同一段时间内,气流喷嘴沿周向转过的距离大于其水平方向前进的距离,此过程可用式(4)表示,即
(4)
(5)
式中ω—旋转风管转动角速度(rad/s);
n—旋转风管转速(r/min),n=ω/2π;
v—沿工作方向水平移动速度(m/s);
D1—旋转风管外轮廓圆弧直径(mm)。
则气流喷嘴在捡拾区域连续工作时必须满足式(5)。
3 捡拾装置运动仿真实验
为了验证气流喷嘴的运动轨迹形式,以及在不同水平速度下,气流喷嘴在捡拾区域连续工作时,旋转风管的合理角速度范围,采用Adams软件对气流喷嘴的有效工作路径进行模拟。
3.1 实验方法
根据经验,本文取水平速度分别为0.3、0.4、0.5、0.6、0.7、0.8、0.9、1.0m/s,分别以计算连续工作条件为初始角速度值进行仿真,仿真过程中,未取得合理角速度值时,将角速度依次增加π/18 rad/s,临近合理值时角速度值以π/180 rad/s增减,分析各水平速度对应的旋转风管合理角速度,仿真过程忽略各结构之间以及地轮与地面间的摩擦。实验参数如表2所示。
3.2 实验模型
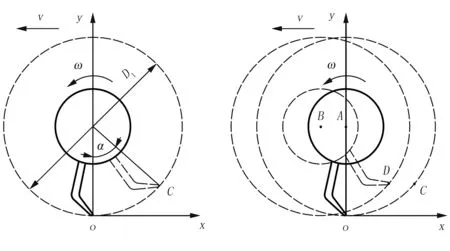
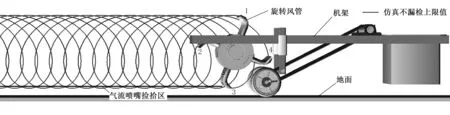
本文运用SolidWorks软件绘制了本捡拾装置的仿真模型,并将其保存为*.x_t,导入Adams软件。本文主要分析旋转风管转速与水平速度的匹配问题,将输送装置、集枣箱等不相关部件与机架固定,旋转风管与机架添加转动副,并添加旋转驱动,以控制旋转转速;整个装置与地面之间添加移动副,并添加移动驱动,以控制移动速度,如图4所示。
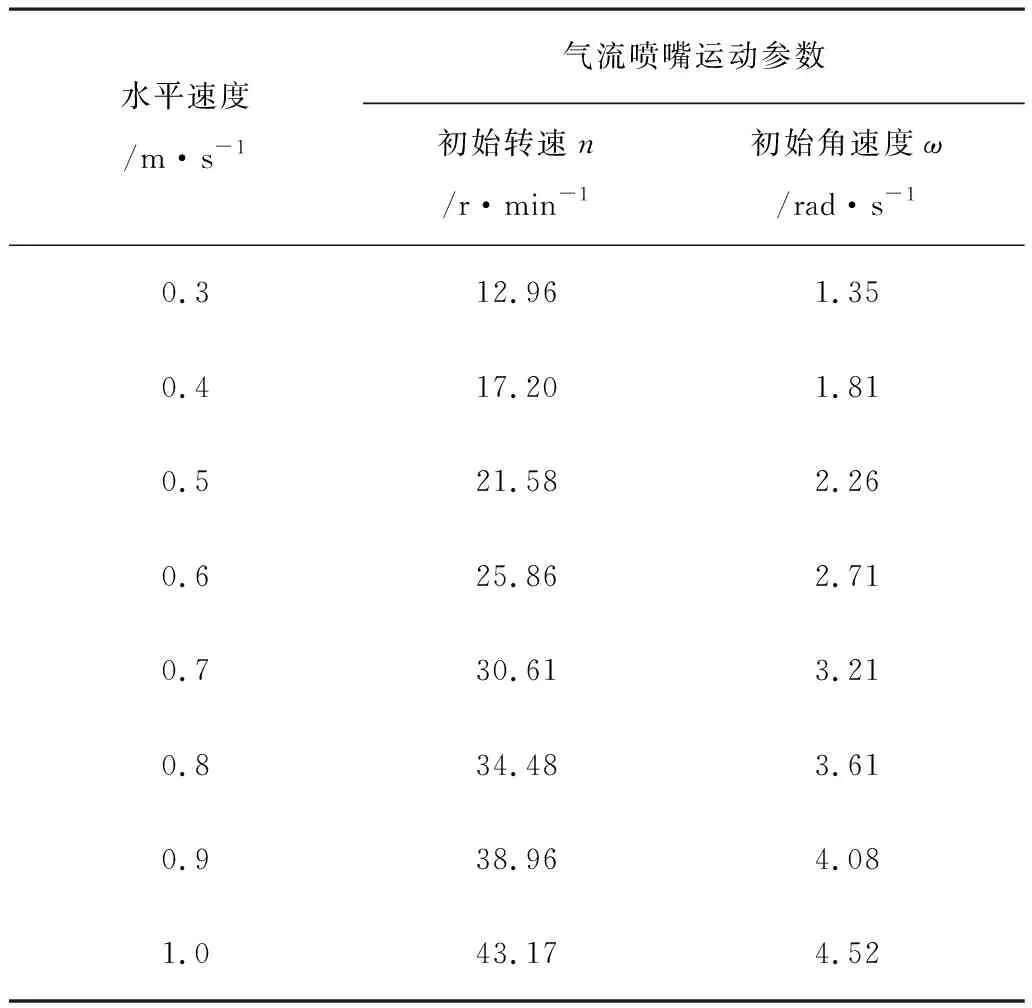
表2 实验条件

1.机架 2.旋转风管 3.气流喷嘴 4.输送装置 5.集枣箱
3.3 实验结果
仿真结果如图5所示。实线为气流喷嘴在捡拾区域进入连续工作的轨迹[图5(a)]和完全连续工作的轨迹[图5(c)],对应角速度如表3所示。虚线为计算连续工作条件角速度值仿真的运动轨迹,图中运动轨迹是旋转风管上4个气流喷嘴的运动轨迹的叠加,当气流喷嘴转入进风管气流区时,进入工作状态,其运动轨迹如图5(b)所示。
仿真结果表明:气流喷嘴的运动轨迹为旋轮线,与计算结果一致;旋转风管以其初始角速度运动时,满足在相同时间内,旋转风管转过的周向位移与其对应水平方向位移相等,在捡拾区域无法实现4个气流喷嘴连续作业,该角速度仅可作为不漏捡的初始判断条件;在仿真过程中,当角速度增加到气流喷嘴在捡拾区域连续工作时,其对应角速度范围如表3所示。
(b) 旋转风管工作区域轨迹仿真图
(c) 气流喷嘴完全连续工作仿真图
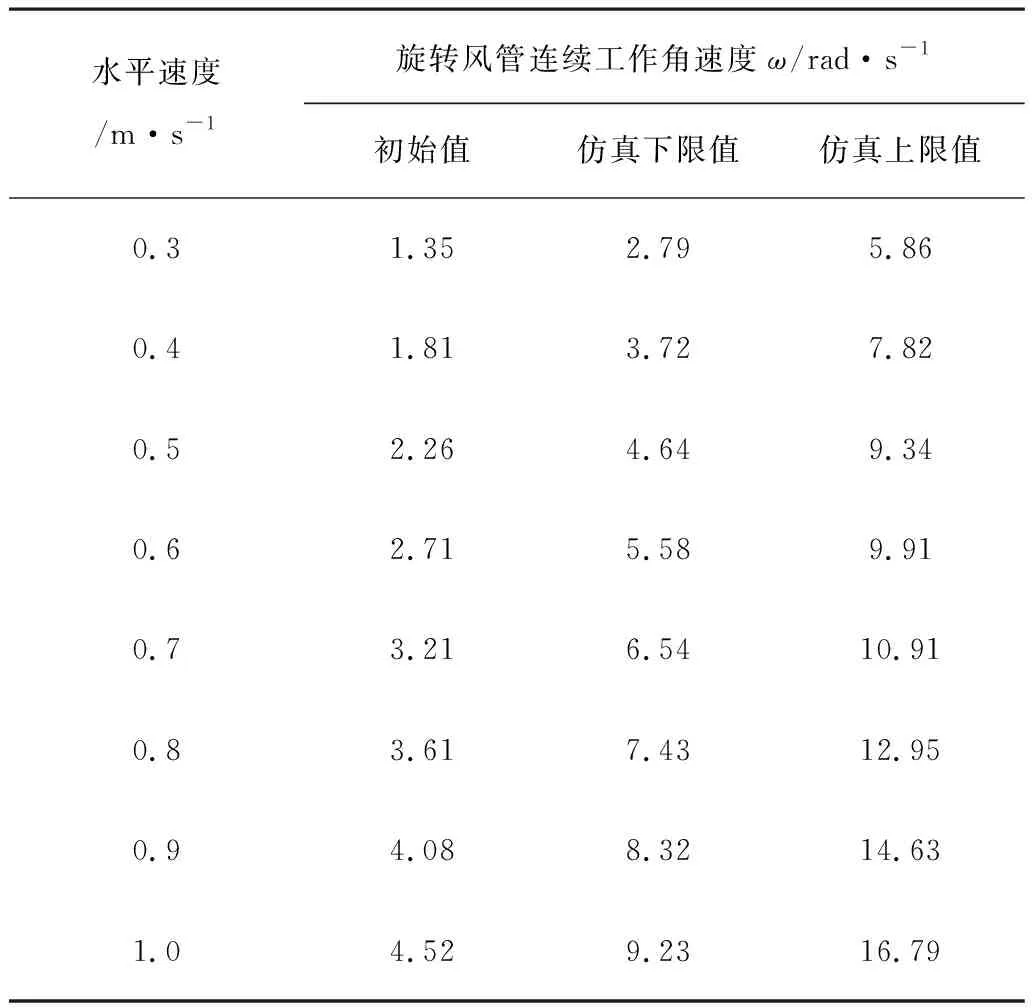
水平速度/m·s-1旋转风管连续工作角速度ω/rad·s-1初始值仿真下限值仿真上限值0.31.352.795.860.41.813.727.820.52.264.649.340.62.715.589.910.73.216.5410.910.83.617.4312.950.94.088.3214.631.04.529.2316.79
4 结论
1) 气吹式落地红枣捡拾装置,其旋转风管周向均布的4列气流喷嘴,相邻两列呈90°分布,与同样90°的进风管气流区配合,可实现进风管气流区风压稳定。
2) 本气吹式落地红枣捡拾装置,结构简单,可实现低洼地面落地红枣的捡拾,同时可实现工作地面连续作业。
3) 本气吹式落地红枣捡拾装置,在水平速度分别为0.3、0.4、0.5、0.6、0.7、0.8、0.9、1.0m/s,气流喷嘴连续工作时,其对应的旋转角速度范围分别为2.79~5.86、3.72~7.82、4.64~9.34、5.58~9.91、6.54~10.91、7.43~12.95、8.32~14.63、9.23~16.79rad/s。
猜你喜欢
趣味(作文与阅读)(2021年12期)2021-04-19
水泥工程(2020年3期)2020-10-28
船海工程(2020年6期)2020-01-03
学生天地(2019年35期)2019-08-25
今日农业(2019年10期)2019-06-26
中学课程辅导·教师通讯(2018年10期)2018-09-04
商品与质量(2018年49期)2018-05-25
科学与技术(2018年12期)2018-04-25
中学生数理化·高一版(2017年3期)2017-07-08
小猕猴学习画刊(2016年6期)2016-05-14
