
基于智能技术的联合收割机多功能智能终端的设计
2018-08-10 09:27詹新生孙承庭
农机化研究 2018年11期
詹新生,孙承庭
0 引言
随着GPS技术、人工智能、计算机控制技术及人机协同技术的突飞猛进,汽车导航、语音播报系统已经成功应用在高端汽车中,未来也将应用于中低端汽车中。车载智能终端集车联网、物联网、智能技术、GPS、GSM、GPRS、传感器技术、Linux系统、ARM等技术于一体,对提高联合收割机的管理具有较大帮助。本文以Exynos 4412处理器为核心,结合车联网、物联网、传感器技术和嵌入式控制等高新技术,设计了车载终端,并实现了联合收割机的定位、导航、语音播报、呼叫维护、呼叫加油,以及计算谷物产量等功能。
1 联合收割机多功能智能终端整体方案
1.1 多功能车载智能终端功能说明
1)定位功能:GPS通过接收卫星信号,可以准确地定出其所在的位置,位置误差小于10m;利用GPS,在地图上实时显示车辆当前位置。
2)地图导航功能:可以根据设定的起点和终点,自动根据实时路况为司机规划路线;倘若司机不小心偏离路线,可以根据当前行驶路线规划一条新的最佳路线,或为终端客户以当前位置为起点会话,以最终目的地为终点,重新规划新的最佳路线。
3)语音导航功能:输入目标地点后,车辆只要遇到前方路口或者转弯,车载GPS语音系统提示用户转向等语音提示。
4)智能导航功能:在短时间失去GPS信号时,可根据车内的加速度传感器、结合行车速度计算出行车情况。
5)娱乐功能:播放U盘、SD卡中的MP3和MP4文件。
6)增加兴趣点功能:可以自主的在地图上添加最新更新的路线或建筑物。
7)由传感器测得一定时间内谷物流量和机器地速等模拟信号,通过计算公式换算出实际收割谷物质量和谷物产量。
1.2 整体方案设计
本文控制系统的核心处理器采用SAMSUNG公司的Exynos 4412处理器,该芯片采用高性能集成外设设计,其主频高达1.4G,处理能力超强,另外还配备丰富的片上资源。本文根据联合收割机车载智能终端特殊需求以及Exynos 4412处理器的特点,设计了联合收割机车载智能终端系统方案。该系统主要功能框架图如图1所示。
Exynos 4412处理器采用ARM9建构体系,因此该系统平台搭建在ARM9和Linux系统平台之上,并基于该平台设计了集GPS定位模块、GSM/GPRS信息收发模块、语音播报系统、三轴重力加速度传感器于一体的智能终端控制系统。
1.3 测产子系统的设计
智能终端测产子系统是利用信号采集与处理、智能控制技术和传感器技术构建的集成系统。该系统主要包括控制单元、CAN总线,以及谷物流量、地速、割台高度和升运器转速等传感器。测产子系统框架如图2所示。
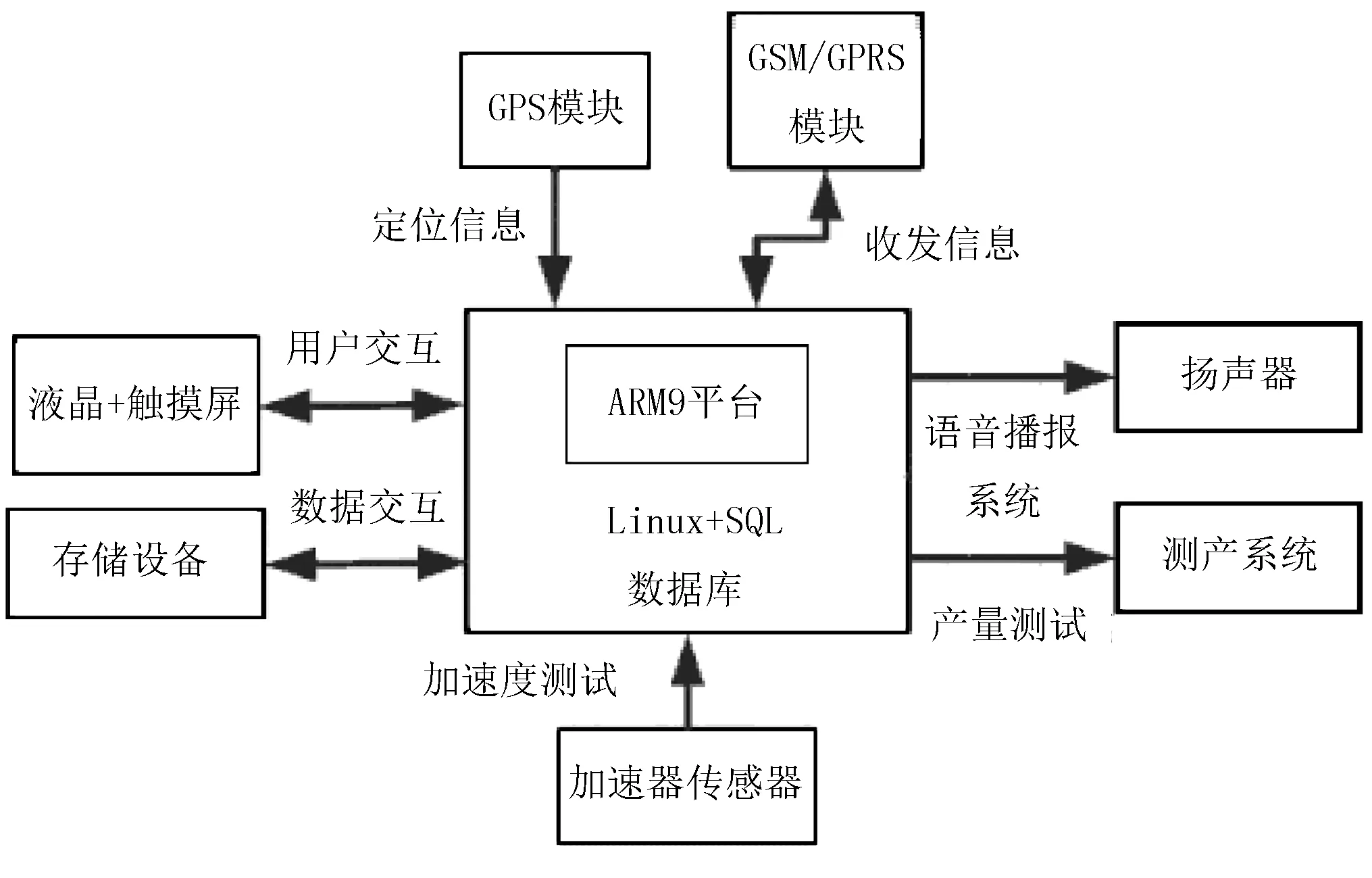
图1 智能终端功能框架图Fig.1 The functional framework diagram of intelligent terminal
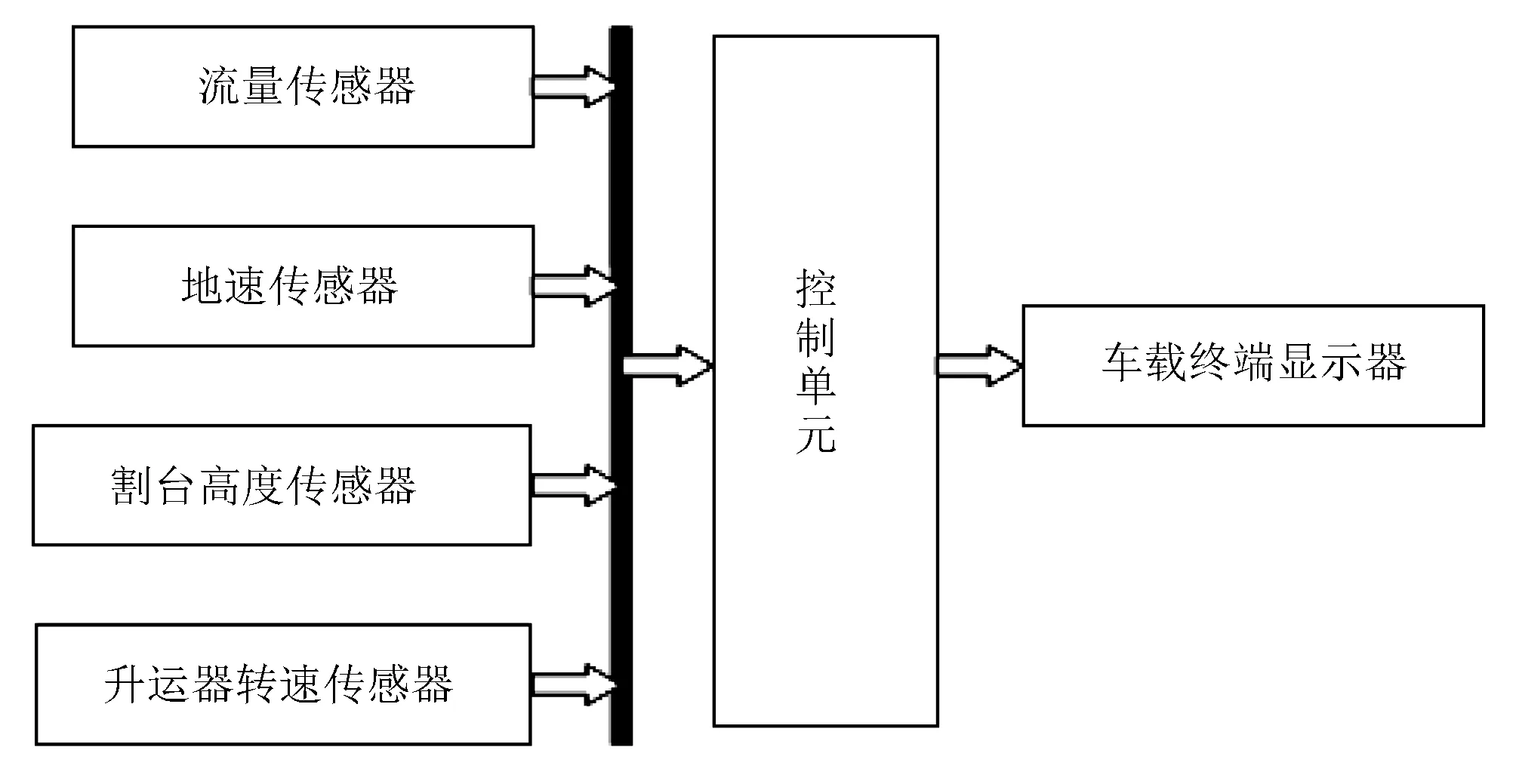
图2 测产子系统框架图Fig.2 The framework diagram of test yield subsystem
测产子系统工作原理:当联合收割机正常进行田间作业时,由多传感器测得每一时间内谷物流量、机器地速、割台高度和升降机转速等模拟信号,然后通过CAN总线方式将数据传送给控制单元,由控制单元将模拟信号转换为数字信号,并通过计算公式换算出实际收割谷物质量和谷物产量,最后通过车载终端显示屏进行数据的输出。
收割谷物质量Y是指谷物在作业过程中,总共收割到的谷物产量,其表达式为
(1)
其中,y为实际测得谷物质量(kg);α为联合收割机的损失率;m为传感器测得的谷物流量(kg/s);v为地速(m/s);△t为单位时间(s);w为收割台实际宽度(m)。
所以,产量Y的计算公式可以写成
(2)
在实际计算中,损失率α、收割台实际宽度w和单位时间△t是已知的,而谷物流量m和地速v分别由流量传感器和地速传感器测得。
2 系统硬件设计
2.1 电源模块的设计
智能终端控制系统采用Exynos 4412处理器作为主控单元,对电源性能要求比较高,因此采用3.3V和1.8V双电源供电。该电源从外部稳压电源引入5V电压,然后分别由CAT6219-180TD-GT3和AMS1084CM-3.3稳压模块进行降压,输出电压为3.3V和1.8V。智能终端控制系统电源模块原理图如图3所示。

图3 电源模块原理图Fig.3 The schematic diagram of power module
2.2 CAN总线设计
MCP2515是一种内置CAN总线协议的控制器,只要外接总线驱动芯片和适当的抗干扰电路就可以很方便地建立一个CAN总线智能测控节点,其高性能、高可靠性及独特的设计和适宜的价格而广泛应用于工业现场控制、智能楼宇、医疗器械、交通工具,以及传感器等领域。CAN总线电路原理图如图4所示。
2.3 三轴重力传感器电路设计
三轴重力传感器MPU6050的寄存器,与温度、陀螺仪和外部感应数据等3个传感器的寄存器相同,都由用户内部不可见和外部用户只读等两个寄存器构成。内部寄存器中数据在采样时及时得到更新,仅在串行通信接口不忙碌时,才将内部寄存器中的值复制到用户可读的寄存器中去,避免了直接对感应测量值的突发访问。在使用过程中,一般是通过MPU6050采集到的原始数据,经过CPU处理后可以得到俯仰角和翻滚角,要把电子罗盘的数据整合进来才可以得到航向角Yaw,即可以得到三轴变化的数据信息。其应用原理图如图5所示。

图4 CAN总线电路原理图Fig.4 The schematic diagram of CAN bus circuit

图5 MPU6050的应用原理图Fig.5 The application principle diagram of MPU6050
2.4 语音播报系统电路的设计
语音播报系统电路的原理是由PWM时序占空比不同来代表不同的数据信息,然后驱动buzzer,而buzzer则根据PWM频率的不同发出不同的音调,实现语音播报的功能。通过该模块系统,实现联合收割机车载GPS自动导航的语音提示和故障报警,语音播报系统电路的原理图如图6所示。
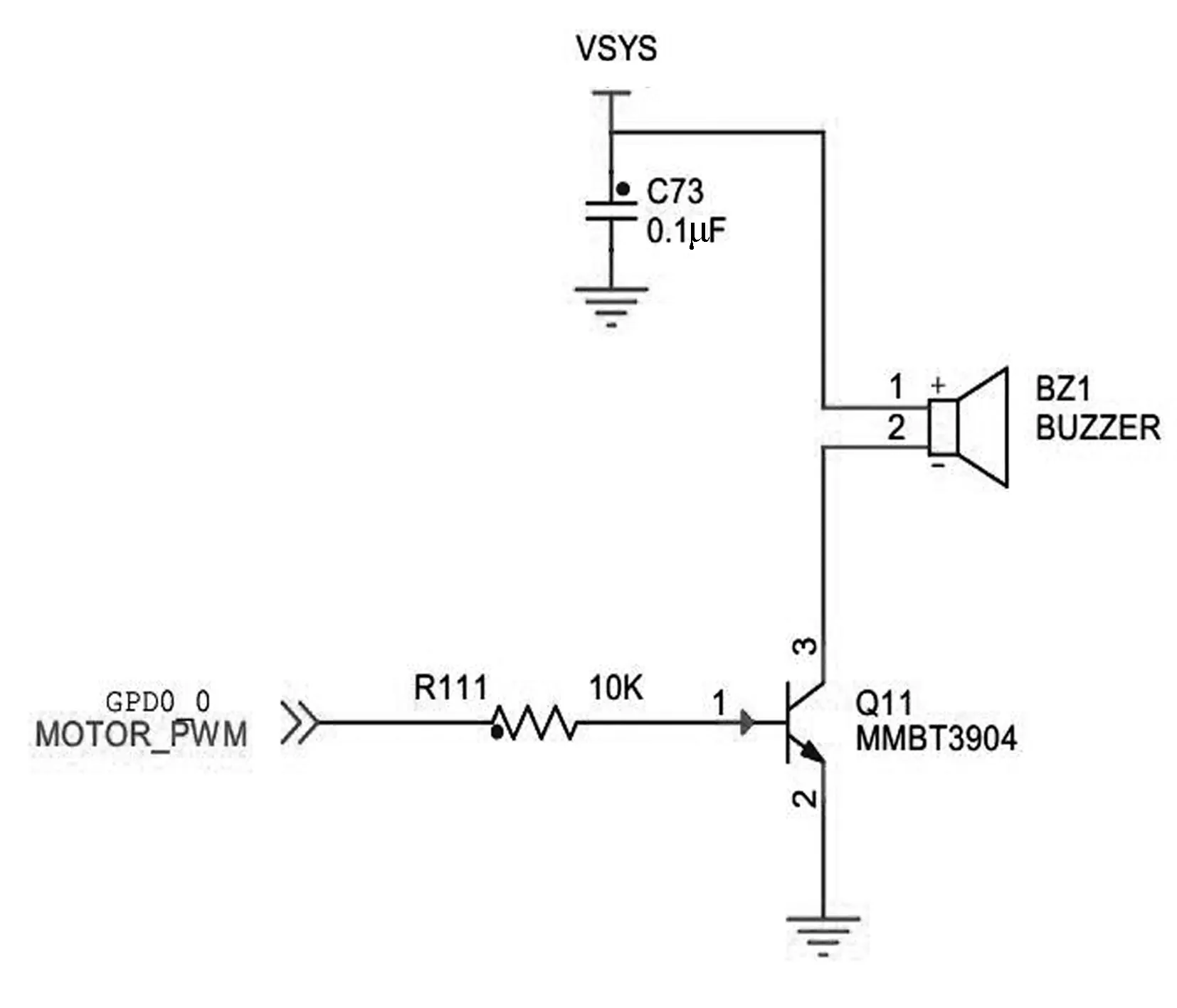
图6 语音播报系统电路原理图Fig.6 The schematic diagram of voice broadcasting system
3 系统软件设计
本文中的联合收割机车载智能终端系统软件采用面向对象和模块化设计思想,重点考虑智能终端定位系统的准确性、可靠性,以及语音播报的人性化设计。在研发阶段,开发环境采用Keil Uvision4平台,可为Exynos 4412处理器提供强有力的开发环境。其集成了大量设备的驱动源代码,在软件设计过程中,仅仅需要简单调用就可以实现模块化设计,为开发和管理Exynos 4412嵌入式工程项目提供了极大便利。该系统软件包括了Main主程序、GPS定位模块、GSM/GPRS信息收发模块、语音播报系统、三轴重力加速度传感器及电子地图等子程序。主程序通过使用各子程序函数入口,实现车载智能终端的正常运转。车载智能终端控制系统软件主流程图如图7所示。
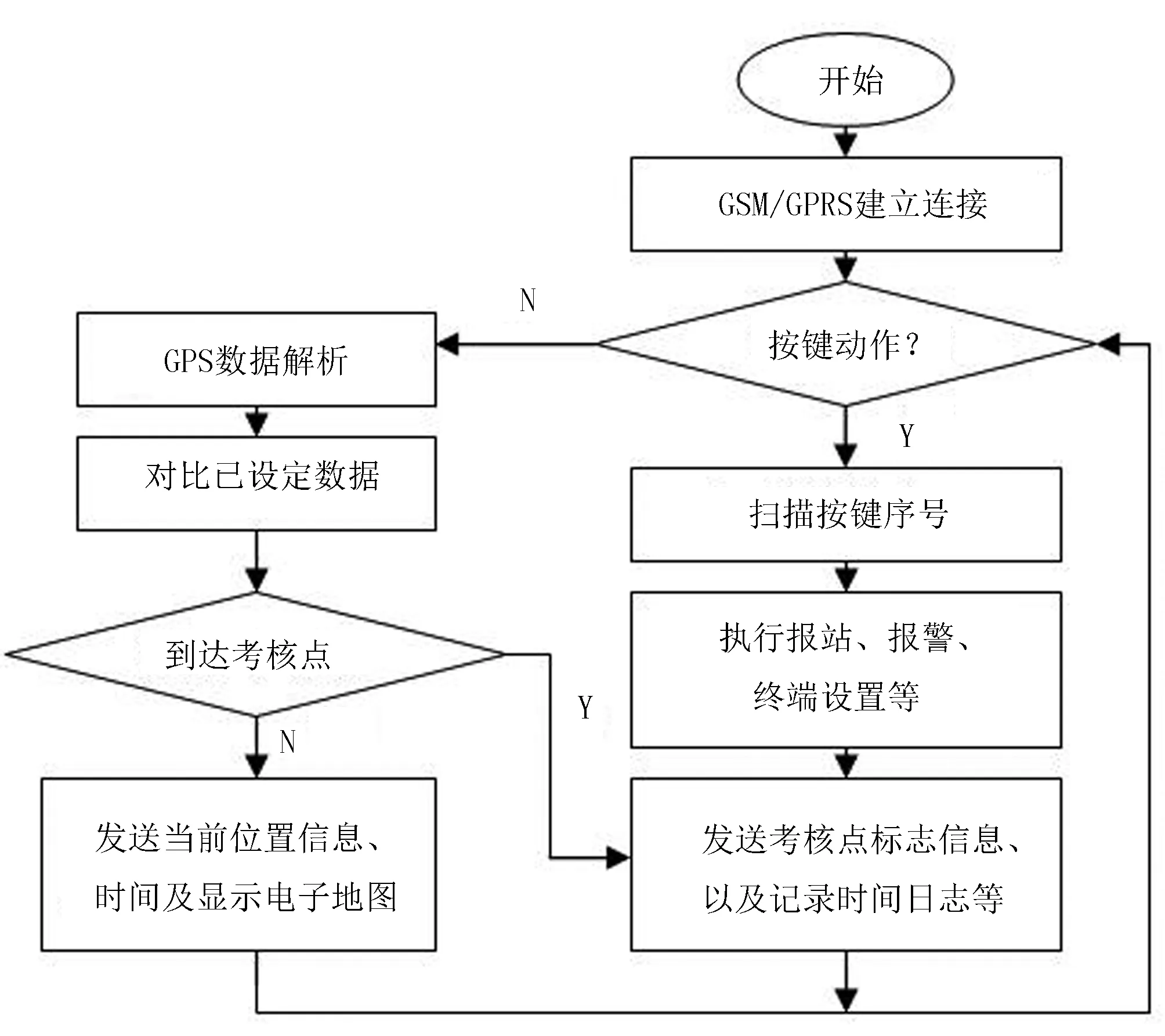
图7 多功能智能终端控制系统主软件流程图Fig.7 The main software flow chart of the multi-function
intelligent terminal control system
三轴重力传感器软件设计是子程序中设计比较复杂的, MPU6050对陀螺仪和加速度计分别用了3个16 位的ADC,将其测量的模拟量转化为可输出的数字量,为了精确跟踪车辆行驶速度快慢的变化,传感器的测量范围都是用户可控的。该模块代码如下:
int main(void)
{
REG_WRITE(GPX1PUD,REG_READ(GPX1PUD) & (~(0x3 << 2)));
REG_WRITE(GPX1CON,REG_READ(GPX1CON) & ~(0xf << 4) | (0xf << 4));
REG_WRITE(EXT_INT41_CON,REG_READ(EXT_INT41_CON) & ~(0x7 << 4) | (0x2 << 4));
REG_WRITE(EXT_INT41_MASK,REG_READ(EXT_INT41_MASK) & (~(0x1 << 1)));
REG_WRITE(ICDDCR,1);
REG_WRITE(ICDISER1_CPU0,REG_READ(ICDISER1_CPU0) & (~(0x1 << 25)) | (1<<25));
REG_WRITE(ICDIPTR14_CPU0,REG_READ(ICDIPTR14_CPU0) & (~(0xff << 8)) | (1<<8));
REG_WRITE(ICCICR_CPU0,1);
REG_WRITE(ICCPMR_CPU0,0xff);
REG_WRITE(GPX2CON,REG_READ(GPX2CON) & (~(0xf << 28)) | (0x1 << 28));
REG_WRITE(GPX2DAT,REG_READ(GPX2DAT) & (~(0x1 << 7)));
i2c5_init();
mydelay_ms(100);
uart2_init();
mydelay_ms(100);
MPU6050_Init();
mydelay_ms(100);
return 0;
}
4 试验结果与分析
为了测试多功能智能终端测产子系统性能的稳定性和可靠性,以及其是否能够满足联合收割机在实际收割作业中的工作要求,进行了试验。其中,工作要求主要包括收割机行驶中的地速、谷物流量信息采集的精确度,以及根据二者计算得出的产量等。2017年4月26日在某小麦种植示范区进行了一次实际的田间试验,并在作业过程中,观察地速和谷物流量的精确值。多功能智能终端测产子系统主界面如图8所示。

图8 智能终端测产子系统主界面图Fig.8 The main interface diagram of intelligent terminal test yield subsystem
在作业中,记录测产子系统测得的收割总质量、作业区域总面积和平均产量,并将收割的谷物装进包装袋,最后由人工测得收割到谷物的总质量,并根据作业区域面积计算出平均产量。为了更加准确地计算收割质量,提高试验的说服力,该步骤重复进行3次。田间试验的测试数据如表1所示。

表1 田间试验的测试数据Table 1 The test data of field experiment
由表1数据可以看出:在田间试验中,系统测得产量和收割谷物实际产量相差较小,数据一致性较高,误差基本在3个百分点上下,能够满足联合收割机测产的要求。试验结果表明:通过4组试验数据对比,可以判断测产子系统测得的产量达到了较高的精度。该多功能智能终端系统不仅可以提供较好的人机交互界面,还能完成定位、导航、语音播报、呼叫维护、呼叫加油以及计算谷物产量等多种功能,为“智慧农机”的实现提供了非常便利的条件。
5 结论
以联合收割机多功能车载智能终端系统理论为基础,结合收割机作业特点和智能控制系统的特性,确定该系统的总体设计方案,并对三轴重力传感器电路设计、CAN总线设计、电源模块设计及语音播报系统等重要电路进行了简要介绍。在相应的平台上,对各子系统进行了模块化编程,最后实现了对联合收割机进行监控和调度管理,以及终端的谷物测产、呼叫维护、呼叫加油、定位、地图导航、语音导航及智能导航等功能,为“智慧农机”的实现提供了非常便利的条件。
猜你喜欢
今日农业(2021年12期)2021-11-28
农民致富之友(2020年20期)2020-07-18
四川蚕业(2020年3期)2020-07-16
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
今日农业(2019年11期)2019-08-15
作文与考试·初中版(2018年23期)2018-09-10
农民致富之友(2018年7期)2018-05-04
创新作文(3-4年级)(2016年5期)2017-05-16
