
高地隙田园管理机倾翻预警研究
2018-08-10 09:27彭朝晖赵建柱高明远朱大友王德成
农机化研究 2018年11期
彭朝晖,赵建柱,高明远,朱大友,王德成
(中国农业大学 工学院,北京 100083)
0 引言
我国的丘陵山区约占国土面积三分之二,广泛分布着茶田、棉田[1]。茶田、棉田坡度大小不一,道路崎岖难行,机耕道路窄而不平,加之各种复杂的路面条件,导致田园管理机的行驶和工作状况较为恶劣,因此茶田喷药等作业情况对田园管理机提出了高地隙的要求[2]。大多数高地隙的田园管理机具有重心高、坡地稳定性和侧倾稳定性均较差的特点,易发生失稳侧翻的事故,已严重影响了高地隙田园管理机的安全性能及其推广使用。因此,针对田园管理机的侧翻预警研究变得尤为重要[3-6]。
本文针对高地隙田园管理机进行侧翻预警研究,建立了三自由度侧翻动力学模型和车轮侧向力模型,提出基于动态LTR值的侧翻评价指标,通过Simulink对典型转向工况进行仿真,基于Labview开发了田园管理机侧翻预警系统,进行实车试验验证了评价指标的准确性。
1 整机结构及数学模型
1.1 整机结构
整机主要由车架、行走轮系统、电机、操纵装置、机具牵引装置和辅助工作装置等部分组成,如图1所示。

1.前车轮 2.前升降机构 3.车架 4.后车轮 5.轮毂电机 6.后升降机构 7.后悬挂 8.电动推杆 9.座椅 10.制动系统 11.转向系统 12.电池组图1 田园管理机二维图
1.2 田园管理机动力学模型
建立高地隙田园管理机三自由度侧倾动力学模型,由半车转向模型和侧倾平面模型两部分组成,包括整机沿y轴的横向运动、绕x轴的侧倾运动和绕z轴的横摆运动3个方面,如图2所示。
由于动力学的复杂性,为简化计算,对整机动力学特性进行适当假设:
1)忽略轮胎滚动阻力和空气阻力的影响;
2)忽略俯仰方向动力学特性和空气动力的作用;
3)忽略前后轴不对称性对侧倾的影响;
4)忽略转向系统的影响,侧倾模型以两前轮转角为输入,且左右前轮转向角相同,左右车轮动力学特性关于X轴对称;
5)假设相对于纵向车速、侧向速度、横摆角速度,侧倾角都很小,可线性化处理,质心处的纵向速度为常数;
6)本机无悬架,采用车轮等效悬架系统,车轮垂向阻尼系数和车轮垂向动刚度等效悬架等效阻尼系数和悬架等效刚度;
7)本机无悬架,车轮以上部分质量为簧载质量。
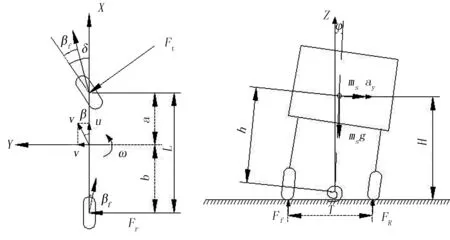
图2 田园管理机模型示意图
根据达朗贝尔原理,可得田园管理机的侧倾动力学方程[7]:
沿Y轴侧向运动平衡方程为
(1)
绕Z轴横摆力矩平衡方程为
(2)
绕X轴侧倾力矩平衡方程为
田园管理机质心位置横向加速度为
式中m—整机质量;
Iz—横摆转动惯量;
Ix—侧倾转动惯量;
Ixs—簧载质量等效转动惯量;
a—质心距前轴距离;
b—质心距后轴距离;
ay—质心横向加速度;
ω—横摆角速度;
u—纵向车速;
v—横向车速;
h—质心到侧倾中心距离;
Ff—前轮侧向力;
Fr—后轮侧向力;
cφ—轮胎阻尼系数;
kφ—轮胎动刚度;
φ—车身侧倾角;
δ—方向盘转角。
同时考虑轮胎侧向力模型,前后轮胎侧向力为
Ff=kfβf
(5)
Fr=krβr
(6)
由于前后轮胎侧偏角相对较小,可得
(7)
(8)
已假设整机纵向速度恒定,此时质心侧偏角可近似表示为
(9)
(10)
已假设簧载质量相对于地面一条水平侧倾轴旋转,并且此轴线位于整机对称面的地面上,根据平衡轴定理,簧载质量绕侧倾轴线的等效转动惯量为
Ixs=Ix+msh2
(11)
为方便进一步计算,以便后续在Simulink中建立侧翻动力学模型,将侧翻模型转化为空间状态方程。其系统空间状态方程可以表达为
(12)

(13)
1.3 侧翻性能评价指标
本文采用横向载荷转移率(Lateral-load Transfer Ratio,LTR)作为侧翻动态特性的评价指标,即
(14)


(15)
联立方程(14)、(15),根据模型假设,且侧倾角值很小,可得
(16)

2 仿真分析与预警系统搭建
2.1 Simulink侧倾动力学模型建模
以鱼钩转向为系统输入,其方向盘转角随时间变化如图3所示。

图3 方向盘转角输入
系统的输出为状态方程中定义的质心侧偏角、横摆角速度、侧倾角及侧倾角加速度。 在Simulink中建立模型如图4所示。
2.2 基于Labview的侧翻预警系统设计
高地隙田园管理机侧翻预警系统主要由传感器、采集系统、上位机和预警系统组成,如图5所示。试验采用数据采集卡和串口通讯相结合的数据采集方式。

图4 Simulink侧倾动力学建模

图5 侧翻预警系统总体方案示意图
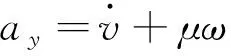
最终得到完整的侧翻预警系统,由数据显示区、预警信号灯、数据存储区、采集设置区及图形显示区5大区域组成,如图6所示。该系统的功能:通过采集设置区设置采集接口、采集频率等参数;数据显示区和图形显示区直观地得到当前整机行驶状态具体数值和变化趋势;经过系统数据处理得到动态LTR实时曲线,并将具体数值输出至预警信号灯;数据存储区将每次试验结果存储至Excel表格,为后续理论分析提供试验基础数据。
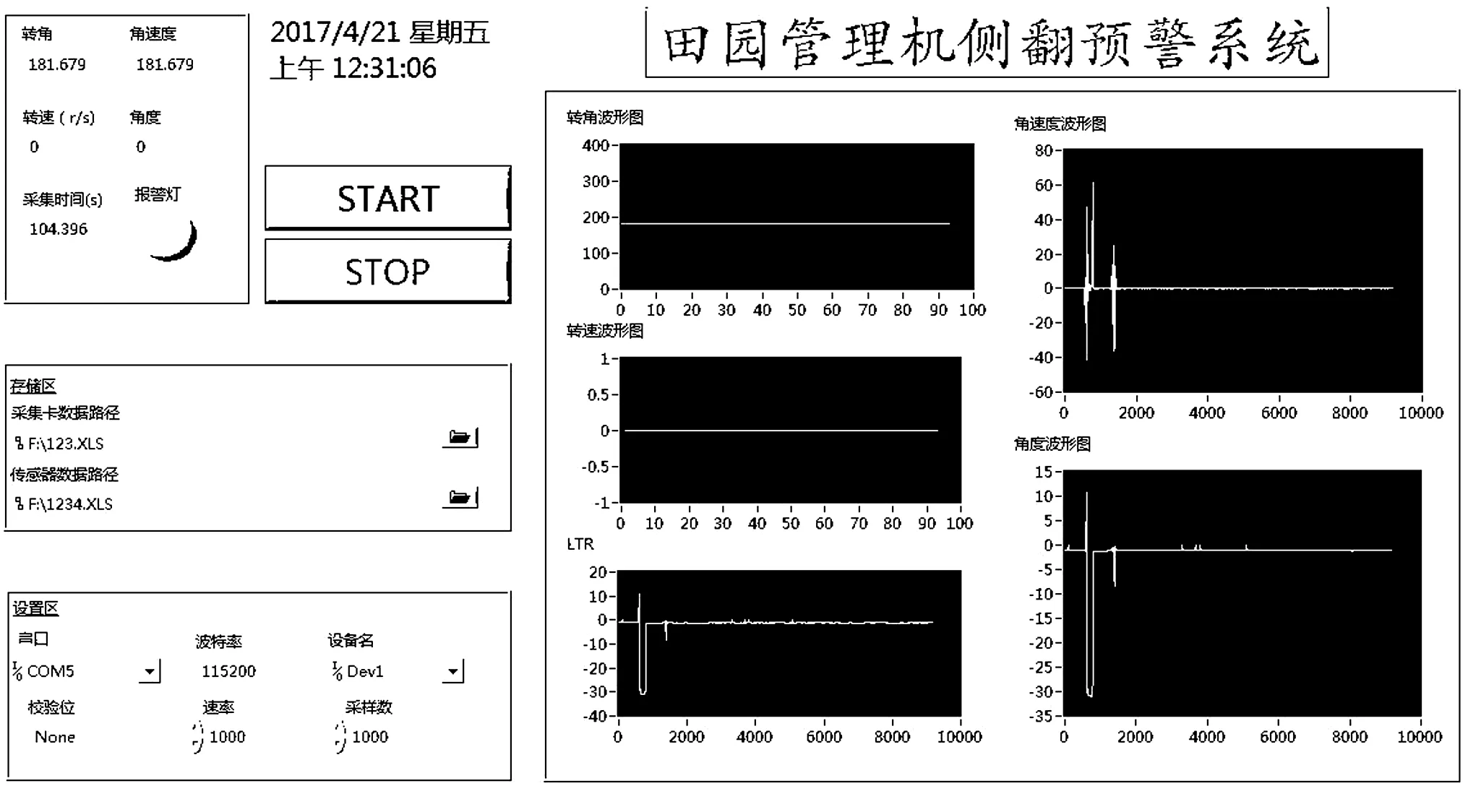
图6 高地隙田园管理机侧翻预警系统前面板
3 仿真、试验结果及对比分析
3.1 试验方案
依据仿真时方向盘转角输入和运动速度,计算出整机运动轨迹,在试验场上用颜料画出多组明显的运动路径。实车试验车速为15km/h,完成18次试验数据采集;每次试验有效时长为20s,采集频率为100Hz,试验完成一次共计2 000组数据。前10s为整机起动、加速和车速稳定阶段,后10s为转向试验阶段。
3.2 试验结果
整机试验存在一定难度,侧倾稳定性试验具备较高的风险系数。为较好地完成巡线行驶,对驾驶员技术要求很高,且在试验过程中,存在因驾驶员心理波动或反应快慢等因素导致的试验误差。故18组试验数据选取其中较为理想的3组试验结果进行数据分析,如图7和图8所示。整机试验中侧倾角正向最大值约在11.5s处,约为3.4°;反向最大值出现在14s以后,约为7.3°;侧倾角速度正向最大值约在11.5s处,约为9.5(°)/s;反向最大值出现在12.6s,约为10(°)/s,由侧倾角和侧倾角速度计算出的动态LTR反向最大值出现在11.5s,绝对值约为0.42;正向最大值出现在14s后,绝对值约为0.64。

图7 多组试验侧倾角对比
图8 多组试验侧倾角速度对比
3.3 仿真、试验结果对比
进行实车试验,采集试验过程中田园管理机的侧倾角和侧倾角速度曲线,并处理数据得到动态LTR实时曲线,与Simulink仿真结果进行对比分析,如图9~图11所示。

图9 实车试验与仿真侧倾角对比

图10 实车试验与仿真侧倾角速度对比

图11 实车试验与仿真动态LTR值对比
由图9、图10可以看出:实车试验得到的侧倾角幅值、侧倾角速度幅值与仿真结果相差不大,其跟随响应特性较好。正向最大值略小于仿真值,是由于驾驶员为了更好地巡线行驶,在第一阶段转向操作未至标准,就开始反打方向盘所致;反向最大值略大于仿真值,是由于车轮与车架经电动推杆连接,具有一定的挠度,转向过程中力矩导致其变形,在一定程度上增大了侧倾角。试验结果表明:本文建立的侧倾预警系统准确性较高。由图11可以看出:整机13s前无报警工况,动态LTR值均未超过侧翻预警阈值;13s后实车试验出现了蜂鸣器报警、侧翻预警监测系统面板报警信号灯由绿色转换成了红色。试验结果表明,本文所建立的侧翻预警系统对侧翻危险能够及时有效地进行预警。
4 结论
1)针对高地隙田园管理机侧翻预警问题,建立了三自由度侧翻预警模型,以动态LTR值作为侧翻评价指标,经过Simulink仿真和实车试验对比,证实了本文中侧翻预警模型的准确性和侧翻评价指标的有效性。
2)基于侧翻评价指标,以Labview软件作为上位机平台搭建高地隙田园管理机侧翻预警系统,并进行实车试验。试验表明:该侧翻预警系统可以对侧翻危险进行及时预警,为高地隙田园管理机应用于现实复杂工况的行驶、作业提供了安全保障。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
内燃机与配件(2021年11期)2021-09-10
现代装饰(2021年3期)2021-07-22
音乐天地(音乐创作版)(2021年5期)2021-07-16
民用飞机设计与研究(2020年4期)2021-01-21
内燃机与配件(2020年20期)2020-09-10
河南科学(2020年3期)2020-06-02
中国煤炭工业(2019年5期)2019-11-04
电子制作(2019年11期)2019-07-04
小猕猴智力画刊(2018年10期)2018-11-13
